【卫星通信】高通提案S2-2504588解读-基于控制平面优化的GEO卫星IMS语音解决方案

引言
3GPP SA2工作组于2025年5月通过的高通提案S2-2504588,针对静地轨道卫星(GEO)支持IMS语音服务(VoLTE/IMS)的场景,提出了基于控制平面CIoT EPS优化(Control Plane CIoT EPS Optimization)的技术解决方案。
该提案直接对应3GPP TR 23.700-19中锚定的“关键问题1”(K.I. #1),旨在通过NB-IoT非地面网络(NTN)连接至EPC的架构优化,解决高时延与低功耗设备的实时通信矛盾。本文将从技术挑战、方案核心、架构设计三方面展开解析。
【卫星通信】卫星与5G深度融合的架构研究——释放非地面网络潜能,构建全球无缝连接【3GPP TR 23.700-19 V0.1.0 (2025-04)】

一、技术挑战:高时延与低功耗的冲突
GEO卫星的传播时延(约250-300ms)对IMS语音业务的实时性和可靠性提出了严峻考验。尤其在NB-IoT设备上,语音通信需同时满足以下需求:
- 低功耗要求:NB-IoT设备设计目标之一是延长电池寿命,需支持扩展的不连续接收(eDRX)和长周期寻呼;
- 实时性约束:语音包需在300ms双向时延内完成传输(符合ITU-T G.114建议),而GEO单程时延已占主导;
- 协议栈效率:传统用户平面(UP)数据传输需经过RLC/MAC层应答重传机制,叠加高时延将导致效率低下。
高通的方案需在这些限制下,实现EPC网络对NB-IoT NTN设备的IMS语音覆盖。
二、解决方案核心:控制平面CIoT优化的创新应用
3GPP TS 23.401中定义的控制平面CIoT优化(CP CIoT)原本用于NB-IoT设备的短数据传输,允许用户平面数据通过信令无线承载(SRB)直接封装于RRC层,省去专用数据承载的建立流程。高通方案将其拓展至IMS语音业务,通过以下设计实现低时延、低协议开销的传输:
1. 高层原则(High-Level Principles)
- 技术基础:
基于3GPP TS 23.401中定义的控制平面CIoT优化技术,将IMS信令流(SIP/SDP)与语音媒体流(RTP/UDP/IP)分别映射到独立的专用信令无线承载(SRB),以满足差异化的QoS需求。 - 关键优势:
- 低协议开销:通过控制平面传输避免用户平面(UP)承载的冗长建立流程;
- 差异化处理:信令流(高可靠性)与语音流(低时延)独立处理,适应GEO高时延特性;
- 兼容性:无需改动现有EPC与IMS核心网,最大化复用既有网络架构。
2. 需求与挑战
- IMS信令流要求:
- 高可靠性:SIP/SDP信令需确保无误传输;
- 容错能力:可容忍部分时延(单程约250-300ms)。
- 语音媒体流要求:
- 超低延迟:语音包需在300ms双向时延内完成传输;
- 低协议开销:避免RLC/MAC层应答重传机制导致的效率下降;
- 容许丢包:依赖编解码器(如AMR)进行丢包补偿。
三、网络架构与承载映射
1. 系统架构设计
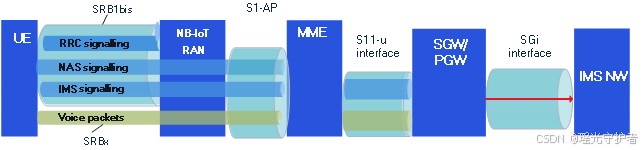
提案文档定义了NB-IoT NTN终端通过控制平面CIoT优化连接至EPC的高层架构(参见下图),关键组件包括:
- NB-IoT NTN终端:支持双SDF分流与专用SRB配置;
- E-UTRAN基站:分配独立逻辑信道(Logical Channel)至不同SRB,标记优先级;
- EPC核心网:PGW需兼容IP与非IP PDN连接(如NIDD封装),MME增强NAS层对语音流的处理逻辑。

2. PDN连接类型适配
提案提供两种PDN类型配置选项,以适应不同部署场景:
| 选项 | PDN类型 | IMS信令流处理 | 语音媒体流处理 |
|---|---|---|---|
| a | IP | SIP/UDP/IP | RTP/UDP/IP |
| b | 非IP(NIDD) | SIP/NIDD(需封装) | RTP/NIDD |
关键注释:
- 文档中明确指出,IMS信令与语音流的PDN连接处理方式(是否共用PDN连接)尚待进一步标准化(FFS)。
- 非IP模式下,NIDD协议仅通过NAS层传输数据,避免IP协议栈带来的额外开销。
3. EPS承载与QoS映射
- 默认EPS承载:
提案建议使用QCI-5(映射至IMS信令流)的默认承载,省去动态建立专用GBR承载的延迟。 - 原因:
- NB-IoT不支持GBR承载;
- 传统流程中动态PCC(策略与计费控制)建立QCI-1专用承载会引入额外时延(与GEO高RTT叠加)。
- 解决方式:
直接复用默认EPS承载(QCI-5),仅需通过NAS信令协商QoS参数,大幅简化流程。
四、无线协议栈优化
1. 专用SRB与协议头压缩
- SRB1-IMS(信令流):
- 承载SIP/SDP信令,启用RLC层ARQ重传以确保可靠性;
- 头压缩采用ROHC(如SIP头压缩)。
- SRB2-Voice(语音流):
- 承载RTP/UDP/IP或RTP/NIDD数据;
- 禁用RLC层ARQ重传(UM模式),避免反馈延迟导致丢包补偿滞后;
- 启用ROHC(如RTP/UDP/IP头压缩至1-2字节),降低协议开销。
2. RRC状态机调整
- 通过延长RRC连接保持定时器(Connected态),减少NB-IoT设备因短暂语音通话触发RRC连接建立/释放的频次,降低功耗。
- 例如:默认RRC释放定时器为20秒,语音通话场景下可延长至60秒。
3. 动态资源调度优化
- 在MAC层为SRB1-IMS和SRB2-Voice分配不同优先级的逻辑信道,确保语音流优先调度。
- 允许基站基于QoS需求动态调整资源分配(如为SRB2-Voice预留固定大小的物理层资源块)。
五、QoS与性能折中
1. 延迟与可靠性权衡
- IMS信令流:
- 多重ARQ(NAS层+RLC层)确保可靠性,但可能引入额外延迟。
- 语音媒体流:
- 禁用ARQ后可能导致端到端丢包率为5%-10%;
- 实际性能依赖编解码器的丢包隐藏能力(如AMR-WB的参数内插算法)。
2. 卫星链路带宽约束
- NB-IoT单用户峰值速率:
- 上行:~66 kbps(15 kHz子载波,单用户单时隙);
- 语音包压缩后速率:单路VoLTE约23.85 kbps(AMR 12.2 kbps + 包头压缩)。
- 并发容量限制:
单基站支持的并发语音用户数受NB-IoT资源块分配与GEO信道条件限制(可能仅支持数十路并发)。
六、产业应用与兼容性
1. 适用场景
- 应急通信:偏远地区救援设备通过GEO卫星接入紧急语音服务;
- 物联网医疗:穿戴式设备实时上传语音指令;
- 能源监测:海上钻井平台低功耗终端的远程语音反馈。
2. 部署优势
- 零改动现有EPC与IMS:仅需对E-UTRAN与终端进行软件升级;
- 成本效益:无需改造卫星硬件(仅作透明转发),降低部署门槛。
3. 未来演进方向
- 无缝迁移至5G SA:验证该方案在5GC中的可行性(可能涉及N2/N3接口适配);
- 多轨道卫星融合:研究NGSO低轨星座与GEO混合组网中的动态QoS调度策略。
结语
高通提案S2-2504588通过控制平面CIoT EPS优化+专用SRB设计,为GEO-NB-IoT终端提供了一种轻量化的IMS语音解决方案。其核心创新在于将差异化QoS需求与NB-IoT低功耗特性深度结合,在最小化网络改造成本的前提下填补了技术空白。尽管存在容量与星载资源的限制,但该方案为天地一体化网络发展提供了阶段性答案,也为后续6G多轨道卫星通信的标准化奠定了基础。