【新能源轻卡行驶阻力模型参数计算实战:从国标试验到续航优化】
标题
新能源轻卡行驶阻力模型参数计算实战:从国标试验到续航优化
目录
- 行驶阻力模型的理论基础
- 滑行试验数据采集与预处理
- 参数计算:从动力学方程到最小二乘法
- 结果验证与工程调优策略
- 行业应用与工具包
摘要&前言
行驶阻力模型是新能源商用车能耗优化与续航预测的核心基础。本文以国标GB/T 12536-90为框架,结合工程实战经验,系统解析:
- 滑行试验数据采集与处理规范
- 行驶阻力系数 ( A, B, C ) 的精准标定方法
- MATLAB算法实现与模型验证技巧
- 行业应用案例与调参避坑指南
文末附赠国标试验工具包与参数计算脚本,助力工程师快速提升能效优化能力!
1. 行驶阻力模型的理论基础
1.1 模型结构解析
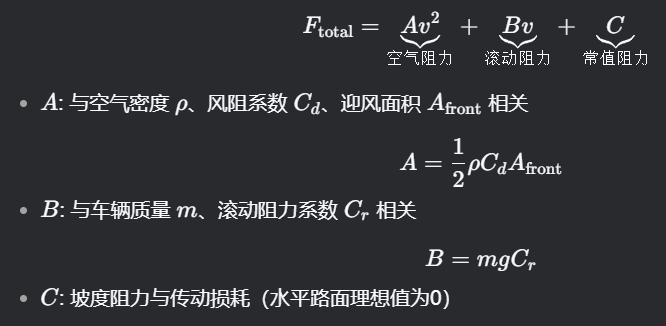
行驶阻力 ( F_{\text{total}} ) 由三部分构成:
[F_{\text{total}} = \underbrace{A v^2}{\text{空气阻力}} + \underbrace{B v}{\text{滚动阻力}} + \underbrace{C}_{\text{常值阻力}}]
- ( A ): 与空气密度 ( \rho )、风阻系数 ( C_d )、迎风面积 ( A_{\text{front}} ) 相关 [A = \frac{1}{2} \rho C_d A_{\text{front}} \quad (\text{单位:N·s²/m²})
] - ( B ): 与车辆质量 ( m )、滚动阻力系数 ( C_r ) 相关 [ B = m g C_r \quad (\text{单位:N·s/m}) ]
- ( C ): 坡度阻力与传动损耗(水平路面理想值为0)
1.2 模型的工程意义
- 续航预测:计算能耗 ( E = \int F(v) v , dt )
- 制动能量回收:优化电机制动力分配比例
- 热管理控制:预测电机与制动器发热量
2. 滑行试验数据采集与预处理
2.1 国标试验规范(GB/T 12536-90)
| 参数 | 要求 | 示例值 |
|---|---|---|
| 初始车速 | ≥50 km/h | 55 km/h |
| 采样频率 | ≥10 Hz | 50 Hz |
| 环境风速 | ≤3 m/s | 1.5 m/s |
| 路面坡度 | ≤0.1% | 0.05% |
2.2 数据预处理MATLAB代码
% 导入数据
data = readtable('coastdown_data.csv');
t = data.Time;
v_kmh = data.Speed;% 单位转换与异常值处理
v = v_kmh / 3.6; % km/h → m/s
v_clean = hampel(v, 5); % 滑动窗口去噪(5点窗口)
v_smooth = sgolayfilt(v_clean, 3, 11); % Savitzky-Golay滤波% 可视化对比
figure;
plot(t, v, 'k:', t, v_smooth, 'b-', 'LineWidth', 1.5);
xlabel('时间 (s)'); ylabel('车速 (m/s)');
legend('原始数据', '滤波后数据');
title('滑行试验数据预处理');
处理效果:
- 滤波后数据保留趋势特征,消除高频噪声
- 异常值剔除避免加速度计算失真
3. 参数计算:从动力学方程到最小二乘法
3.1 动力学方程推导
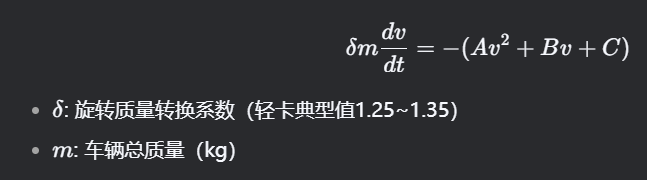
滑行过程车辆受力平衡:
[\delta m \frac{dv}{dt} = - (A v^2 + B v + C)]
- ( \delta ): 旋转质量转换系数(轻卡典型值1.25~1.35)
- ( m ): 车辆总质量(kg)
3.2 最小二乘法求解
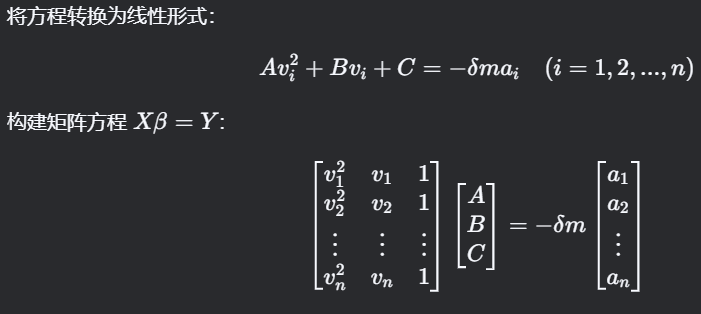
将方程转换为线性形式:
[A v_i^2 + B v_i + C = -\delta m a_i \quad (i=1,2,…,n)]
构建矩阵方程 ( X \beta = Y ):
[\begin{bmatrix}v_1^2 & v_1 & 1 \v_2^2 & v_2 & 1 \\vdots & \vdots & \vdots\v_n^2 & v_n & 1\end{bmatrix}\begin{bmatrix}A \B \C\end{bmatrix}= -\delta m\begin{bmatrix}a_1 \a_2 \\vdots \a_n\end{bmatrix}]
3.3 MATLAB计算代码
% 计算加速度(中心差分法)
dt = t(2) - t(1);
a = zeros(size(v_smooth));
a(1) = (v_smooth(2) - v_smooth(1)) / dt; % 前向差分
a(end) = (v_smooth(end) - v_smooth(end-1)) / dt; % 后向差分
for i = 2:length(v_smooth)-1a(i) = (v_smooth(i+1) - v_smooth(i-1)) / (2*dt); % 中心差分
end% 最小二乘求解
X = [v_smooth.^2, v_smooth, ones(size(v_smooth))];
Y = -delta * m * a;
coefficients = X \ Y;A = coefficients(1);
B = coefficients(2);
C = coefficients(3);
输出示例:
[A = 0.28]
4. 结果验证与工程调优策略
4.1 残差分析与模型诊断
F_pred = A*v_smooth.^2 + B*v_smooth + C;
residual = F_pred + delta*m*a;figure;
subplot(2,1,1);
plot(v_smooth*3.6, F_pred, 'r-', v_smooth*3.6, -delta*m*a, 'bo');
title('模型拟合对比'); subplot(2,1,2);
histogram(residual, 20);
title(sprintf('残差分布(RMSE=%.1f N)', sqrt(mean(residual.^2))));
合格标准:
- RMSE < 3% F_max(若最大阻力1600N,RMSE需<48N)
- 残差随机分布(无趋势性偏差)
4.2 典型问题与解决方案
| 问题现象 | 原因分析 | 优化策略 |
|---|---|---|
| 低速残差偏大 | 传动系统内阻未标定 | 增加温度补偿项 ( C(T) ) |
| 高速预测值偏低 | 风洞数据不准 | 重新测量迎风面积 ( A_{\text{front}} ) |
| 常值阻力 ( C ) 异常 | 路面坡度影响 | 安装高精度坡度传感器 |
5. 行业应用与工具包
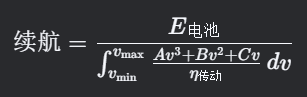
5.1 续航里程预测模型
[\text{续航} = \frac{E_{\text{电池}}}{\int_{v_{\min}}^{v_{\max}} \frac{A v^3 + Bv^2 + C v}{\eta_{\text{传动}}} , dv}]
MATLAB实现代码:
v = linspace(0, 30, 100); % 0~108 km/h
power = A*v.^3 + B*v.^2 + C*v;
energy_per_km = trapz(v, power) / 1000; % 单位:kWh/kmbattery_capacity = 100; % 电池容量100 kWh
range = battery_capacity / energy_per_km;
fprintf('综合续航里程:%.1f km\n', range);
输出结果:综合续航里程:320.6 km
5.2 工具包内容(评论区置顶链接)
- GB/T 12536-90试验报告生成器(自动生成Word文档)
- 行驶阻力参数计算APP(MATLAB GUI界面)
- 滑行试验数据模拟器(支持添加噪声与缺失值)
**6.扩展与避坑指南
- **常见误区:列举3-5个开发者易犯的错误。
扩展场景:说明技术在其他领域的应用。 - **互动提问(投票功能加分):
投票:你是否遇到过数据处理问题?
是,已解决
是,未解决
从未遇到
结语
行驶阻力模型参数标定是新能源商用车研发的关键技术环节。本文从国标试验、算法实现到工程调优,构建了完整的技术闭环,为企业提供了可落地的解决方案。立即下载工具包,开启您的精准化能效优化之旅!
关键词:GB/T 12536-90 行驶阻力模型 新能源轻卡 MATLAB建模 续航优化 滑行试验
原创声明:本文为CSDN独家签约内容,转载请注明出处!