SimScape物理建模实例1--单质量-弹簧-阻尼系统
实例1模型下载:
【免费】simscape单质量弹簧阻尼模型资源-CSDN文库
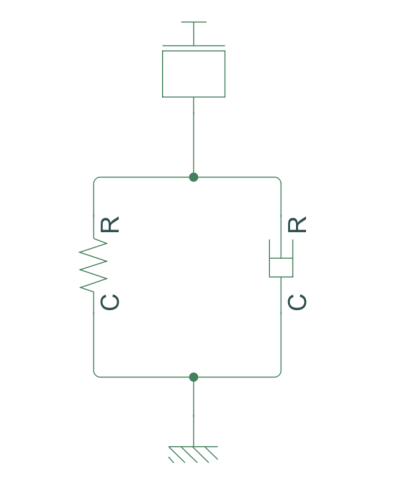
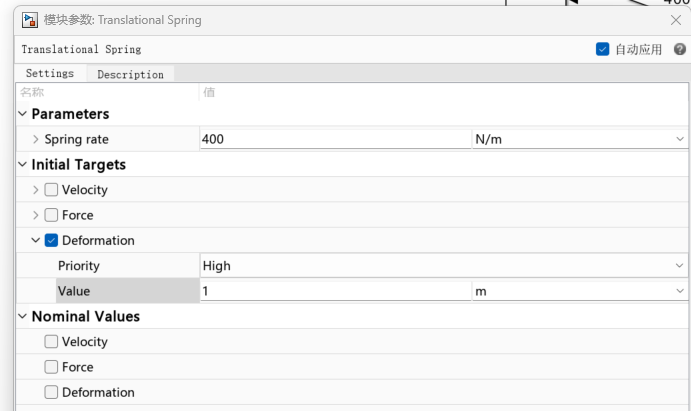
如下图所示单质量弹簧阻尼系统,弹簧具有初始压缩量,假设为1m, 质量块除了受到自身重力作用以外,受到弹簧拉力,以及阻尼器阻尼力,根据牛顿第二定律可以得到运动微分方程也如下图所示:
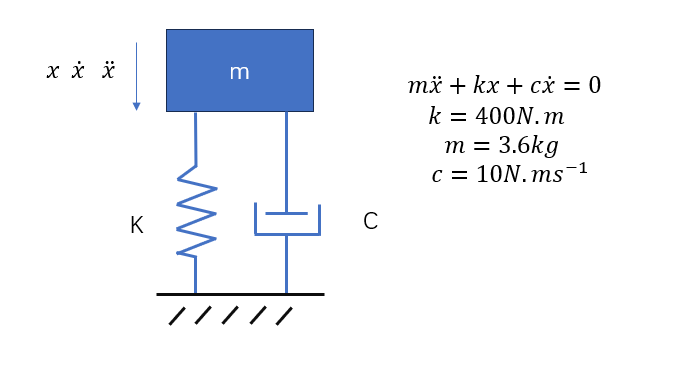
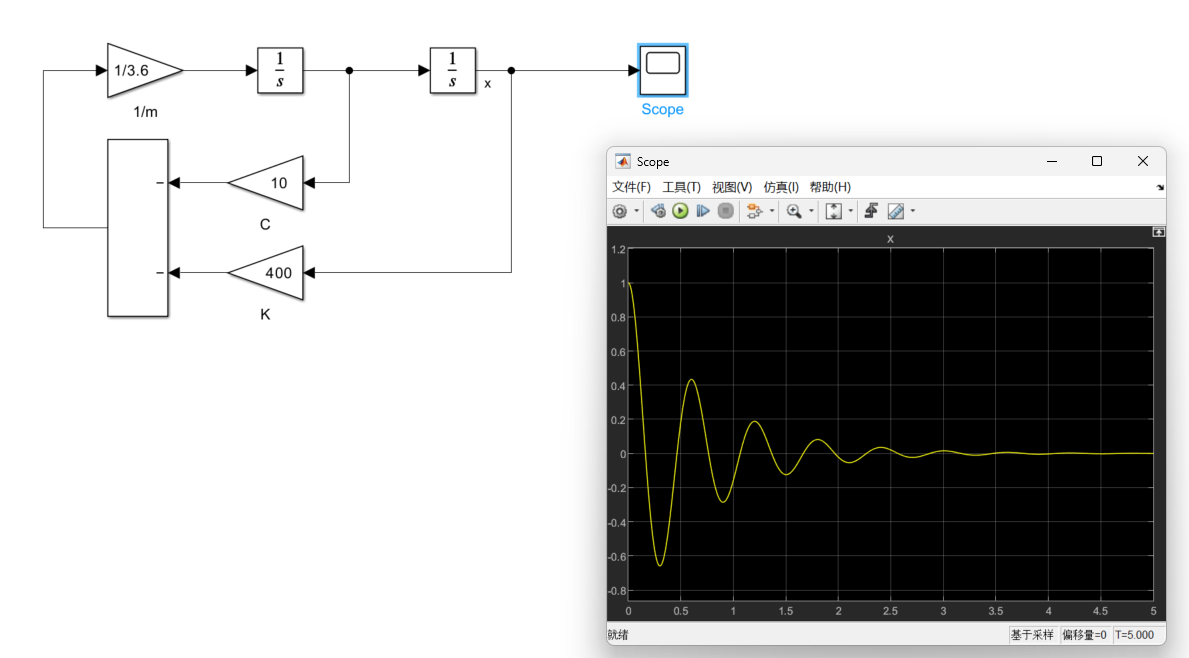
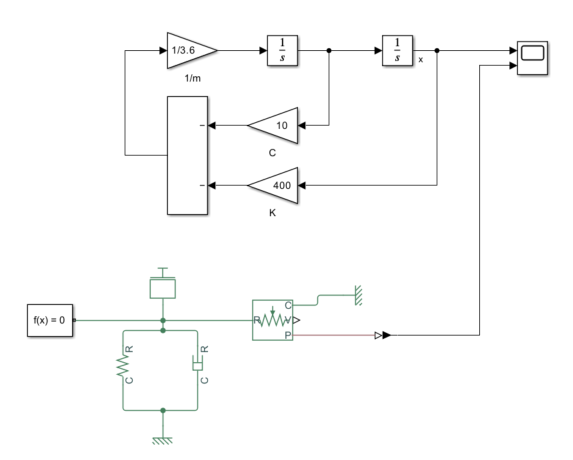
按照以往simulink建模的方式搭建出微分方程及仿真结果如下:
现在用Simscape的模式搭建该模型:
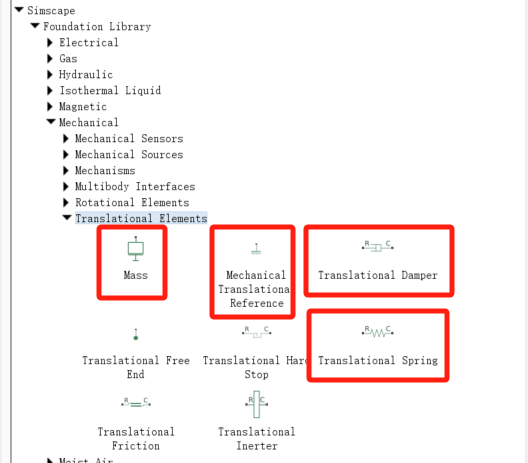
1.在Simscapr的机械库中找到下图四个元件,拖到simulink界面中
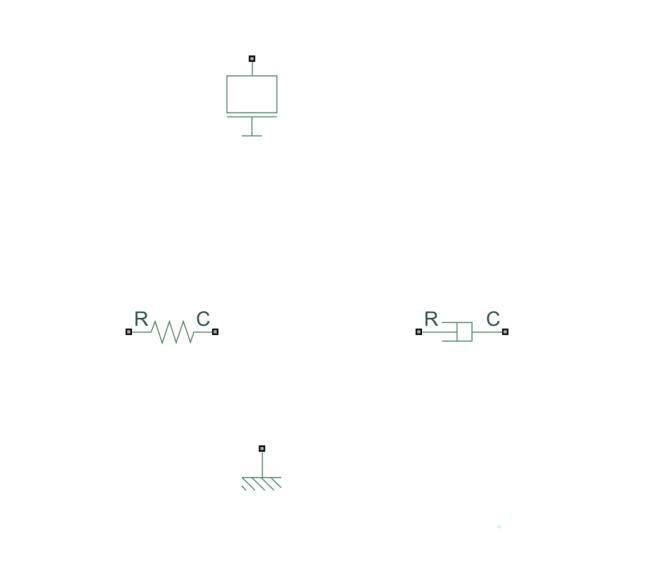
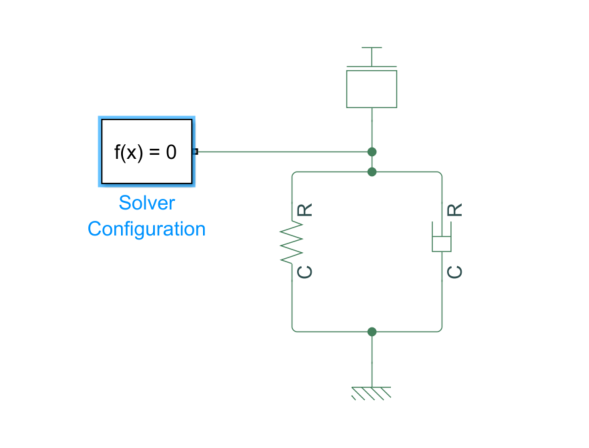
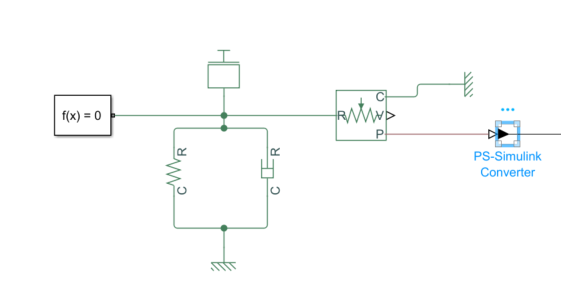
2、调整方向并连线,快捷键Ctrl+R可以旋转,如下图所示,物理模型便搭建完成了。
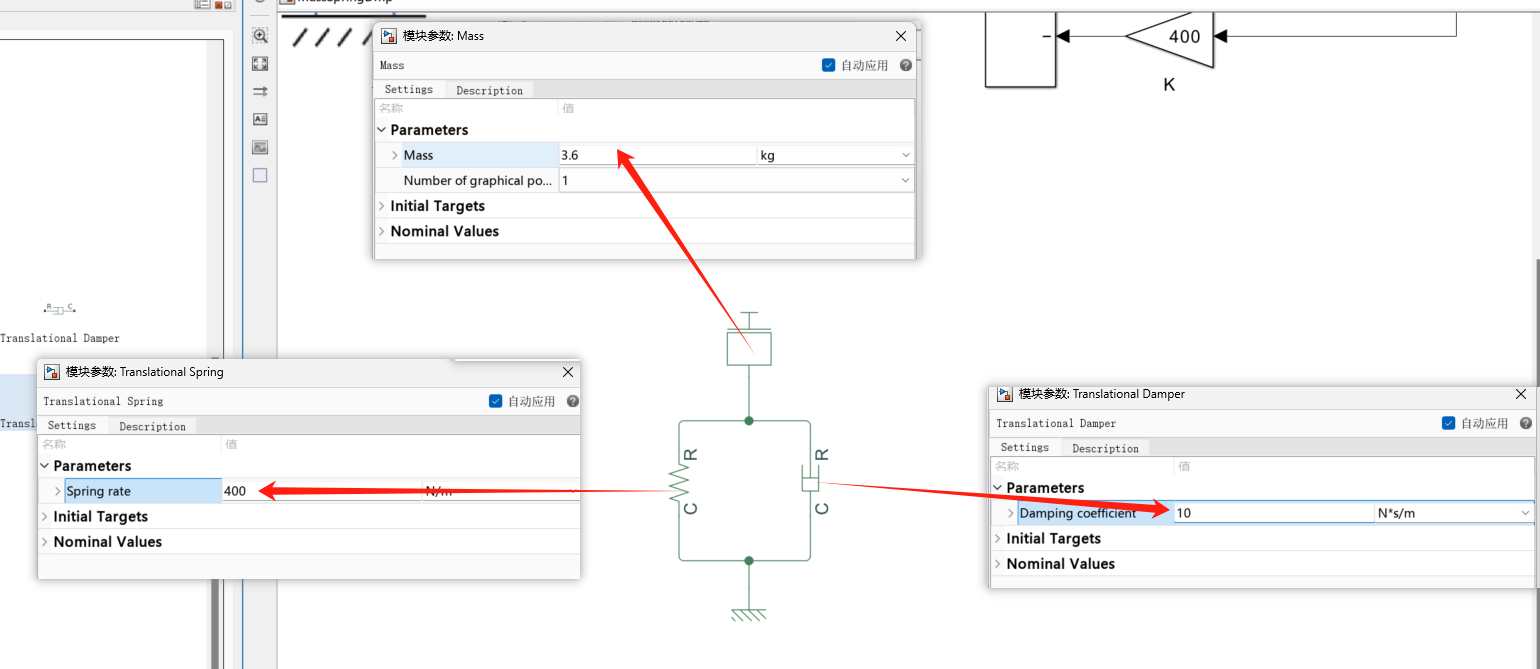
3.填写阻尼器,弹簧,以及质量块的参数
4.添加 solver,并随意链接到simscape模型任意位置,在该模块里可以设置运行周期。
5、我们想观测质量块运行位移,因此需要加入位移传感器,并按照下图链接好线。
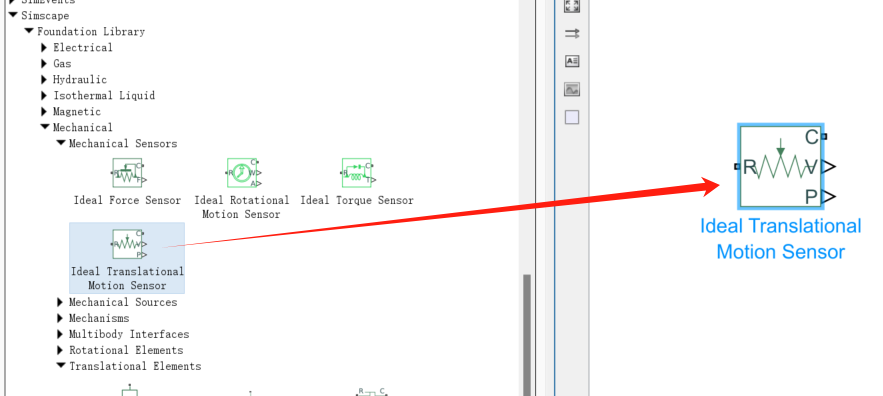
R表示输入线,V和P分别是测量到的位置和速度,这里我们关注位置。此时,还无法将位置信号输入到示波器观测,因为它是simscape信号,不是simulink信号。需要增加一个转换接口。
6、链接示波器,运行对比仿真。
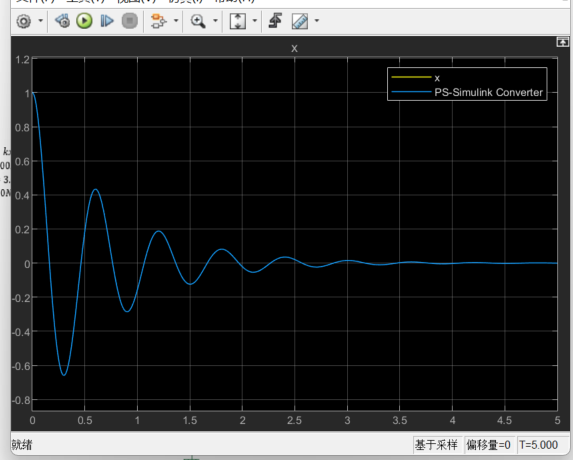
Simscape输出的结果与simulink一模一样。
但是,从建模过程我们可以发现,使用simscape建模可以直接忽略无聊的微分方程搭建,更像动手直接进行机械结构拼装,更加直观易懂。