第六节:图像基本操作-像素级操作
一、数字图像处理基础
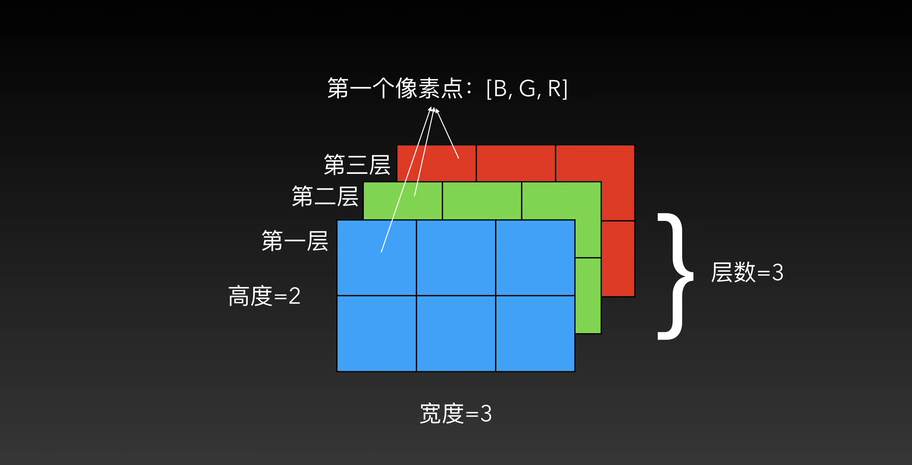
1.1 图像数字化原理
数字图像本质上是二维离散信号,由按矩阵排列的像素点构成。每个像素点的数值代表特定位置的亮度或色彩信息...
1.2 OpenCV核心数据结构
import cv2
import numpy as np# 读取图像文件
img = cv2.imread('image.jpg')# 获取图像属性
print(f"图像尺寸:{img.shape}")
print(f"数据类型:{img.dtype}")
print(f"总像素数:{img.size}")二、图像基础操作实践
2.1 图像输入输出
# 读取图像(支持JPG/PNG/BMP等格式)
img = cv2.imread('input.jpg', cv2.IMREAD_COLOR)# 保存处理结果
cv2.imwrite('output.png', img)# 图像显示
cv2.imshow('Preview', img)
cv2.waitKey(0)
cv2.destroyAllWindows()2.2 颜色空间转换
# BGR转灰度图
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)# BGR转HSV颜色空间
hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)# 恢复颜色空间
bgr = cv2.cvtColor(hsv, cv2.COLOR_HSV2BGR)
三、像素级操作核心技术
3.1 像素访问方法对比
方法一:直接数组访问(推荐)
# 访问(100,50)位置像素的BGR值
px = img[100, 50]
print(f"B:{px[0]}, G:{px[1]}, R:{px[2]}")# 修改像素颜色
img[100, 50] = [255, 255, 255]方法二:numpy优化访问
# 高效区域操作
roi = img[200:300, 100:300]
roi[:,:,0] = 0 # 蓝色通道置零# 整体通道操作
img[:,:,2] = cv2.add(img[:,:,2], 50) # 红色通道增强3.2 像素遍历优化方案
方案一:Python循环遍历(教学演示)
height, width = img.shape[:2]for y in range(height):for x in range(width):# 灰度图处理if len(img.shape) == 2:img[y,x] = 255 - img[y,x]# 彩色图处理else:img[y,x] = [255 - val for val in img[y,x]]方案二:向量化运算(生产环境推荐)
# 图像反色处理(更高效)
inverted = cv2.bitwise_not(img)# 亮度调整
brightened = cv2.add(img, 50)# 对比度增强
contrast = cv2.multiply(img, 1.5)3.3 阈值处理技术
# 全局阈值
_, thresh1 = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)# 自适应阈值
thresh2 = cv2.adaptiveThreshold(gray, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C,cv2.THRESH_BINARY, 11, 2)# Otsu自动阈值
_, thresh3 = cv2.threshold(gray, 0, 255,cv2.THRESH_BINARY+cv2.THRESH_OTSU)四、实战应用案例
4.1 颜色通道分离与合成
# 通道分离
b, g, r = cv2.split(img)# 创建纯色背景
zero_channel = np.zeros_like(b)
red_img = cv2.merge([zero_channel, zero_channel, r])# 通道重组
merged = cv2.merge([b+50, g-20, r*2]) # 调整各通道强度4.2 图像蒙版操作
# 创建圆形蒙版
mask = np.zeros(img.shape[:2], dtype=np.uint8)
cv2.circle(mask, (300,200), 150, 255, -1)# 应用蒙版
masked_img = cv2.bitwise_and(img, img, mask=mask)4.3 像素统计与分析
# 像素值统计
print(f"最大亮度:{np.max(gray)}")
print(f"平均亮度:{np.mean(gray):.2f}")
print(f"亮度标准差:{np.std(gray):.2f}")# 直方图分析
hist = cv2.calcHist([gray], [0], None, [256], [0,256])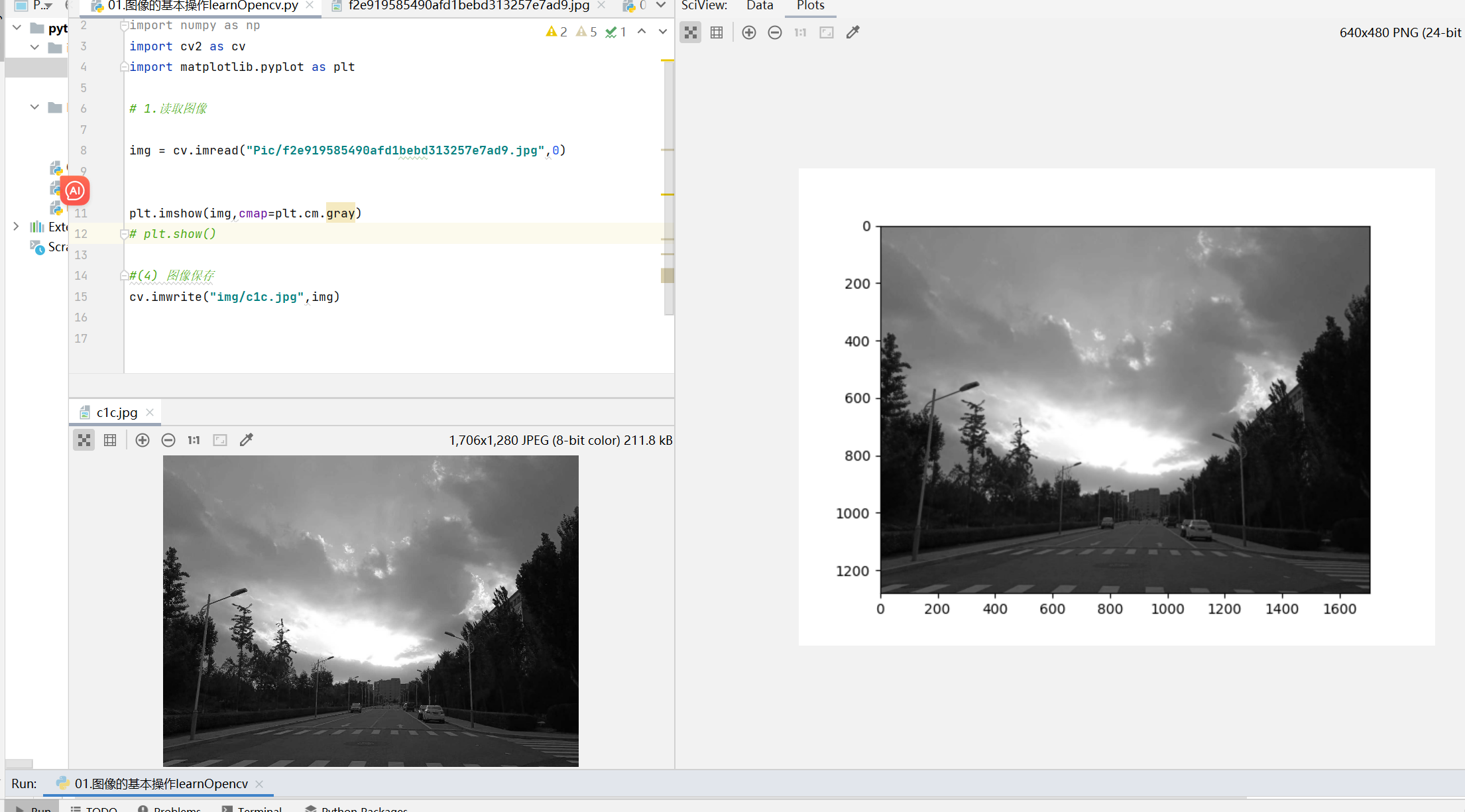
五、性能优化技巧
5.1 访问速度对比测试
| 方法 | 1000x1000图像耗时 |
|---|---|
| Python循环 | 850ms |
| Numpy向量化 | 2.5ms |
| OpenCV内置函数 | 0.8ms |
5.2 内存优化策略
- 使用恰当的数据类型:
uint8节省内存空间 - 避免不必要的拷贝:使用
copy()显式复制 - 及时释放资源:
del操作配合垃圾回收
六、扩展应用方向
6.1 图像滤波基础
# 高斯模糊
blurred = cv2.GaussianBlur(img, (5,5), 0)# 中值滤波
median = cv2.medianBlur(img, 5)# 自定义卷积核
kernel = np.array([[0, -1, 0],[-1, 5, -1],[0, -1, 0]])
sharpened = cv2.filter2D(img, -1, kernel)6.2 边缘检测实现
# Canny边缘检测
edges = cv2.Canny(img, 100, 200)# Sobel算子
sobel_x = cv2.Sobel(gray, cv2.CV_64F, 1, 0, ksize=3)
sobel_y = cv2.Sobel(gray, cv2.CV_64F, 0, 1, ksize=3)七、开发注意事项
- 颜色空间一致性:注意BGR与RGB的区别
- 边界处理:卷积操作时的边缘像素处理
- 数据类型转换:
uint8与float类型的转换 - 内存管理:大图像处理时的内存优化
本文深入探讨了OpenCV的像素级操作技术,从基础访问方法到高级优化策略,涵盖了实际开发中的关键技术要点。