Deformable DETR模型解读(附源码+论文)
Deformable DETR
论文链接:Deformable DETR: Deformable Transformers for End-to-End Object Detection
官方链接:Deformable-DETR(这个需要在linux上运行,所以我是用的是mmdetection里面的Deformable DERT,看了一下源码基本是一致的)
总体流程
Deformable DETR需要前置知识储备——DETR,这个我之前有写过一篇,大家可以先去了解一下,因为DETR里的内容我不会在这里重复讲解。你了解过DETR后,再来看Deformable DETR会发现超级简单,它只是在DETR的基础上做了一些改动,但是效果却会出奇的好,既节约的大量计算,又提高了效果。
ok,言归正传。目标检测想要效果做的好,有一个简单粗暴的方式,输入特征得大。举个例子,你输入100×100的特征数据效果一定比50×50的好。但问题是,这计算量可不是两倍的关系了,DETR的Transformers可是需要每个点与每个点做自注意力和交叉注意力计算。100×100展开成序列长度为1w,每个点又需要与其它1w个点做计算,计算量可是1w×1w,这直接喂给模型这可吃不消。我之前写的DETR里有说过,DETR的训练非常难,8个V100要跑6天才跑完300epoch,这还加大输入特征,简直要显卡老命。
Deformable DETR的作者就想啊,我能不能既增大输入特征,又不增加计算量呢?(既要马儿跑又要马儿不吃草)。做Transformers的时候需要计算每个点与每个点之间的关系,但是真的有那个必要吗?想象一下一张图,图上的每个点正常只与周边的点有羁绊,如果离的很远好像就搭不上什么关系了。按这个思路,那可不可以只计算周边的几个点呢?答案是,yes!并且实验表明,Deformable DETR训练epoch少10倍,就可以达到与DETR相同的效果(比如,Deformable DETR训练30个epoch = DETR训练300个epoch)。而且,由于Deformable DETR的输入特征大,所以它检测小目标的效果也会比DETR好。
那么Deformable DETR具体怎么做呢?看我娓娓道来
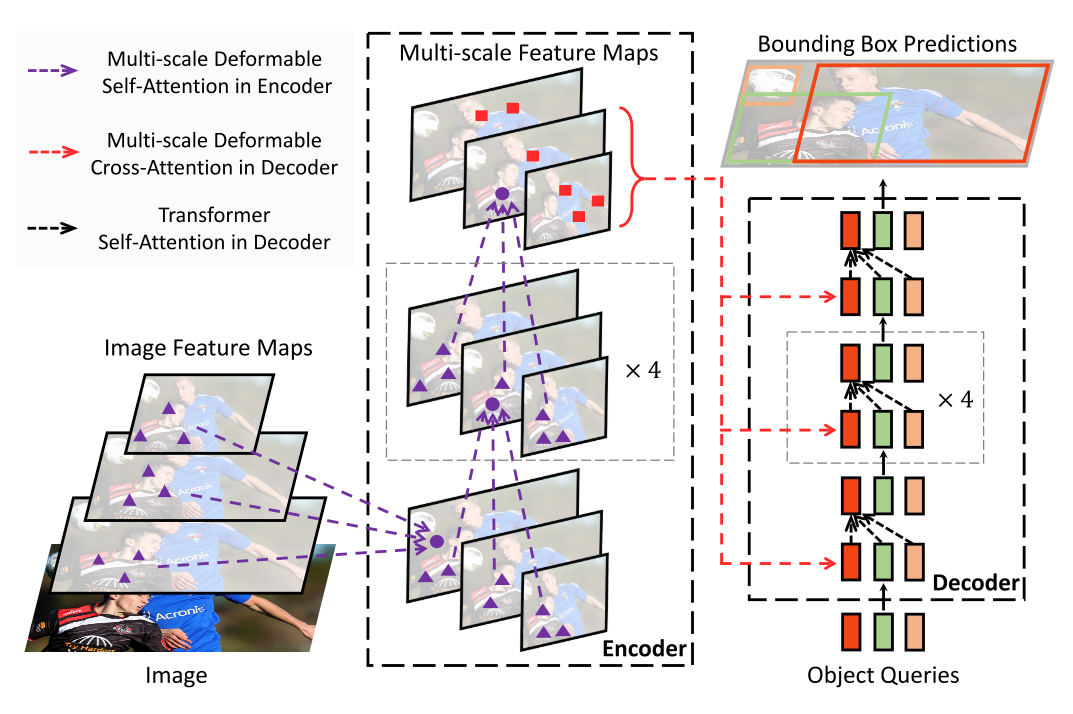
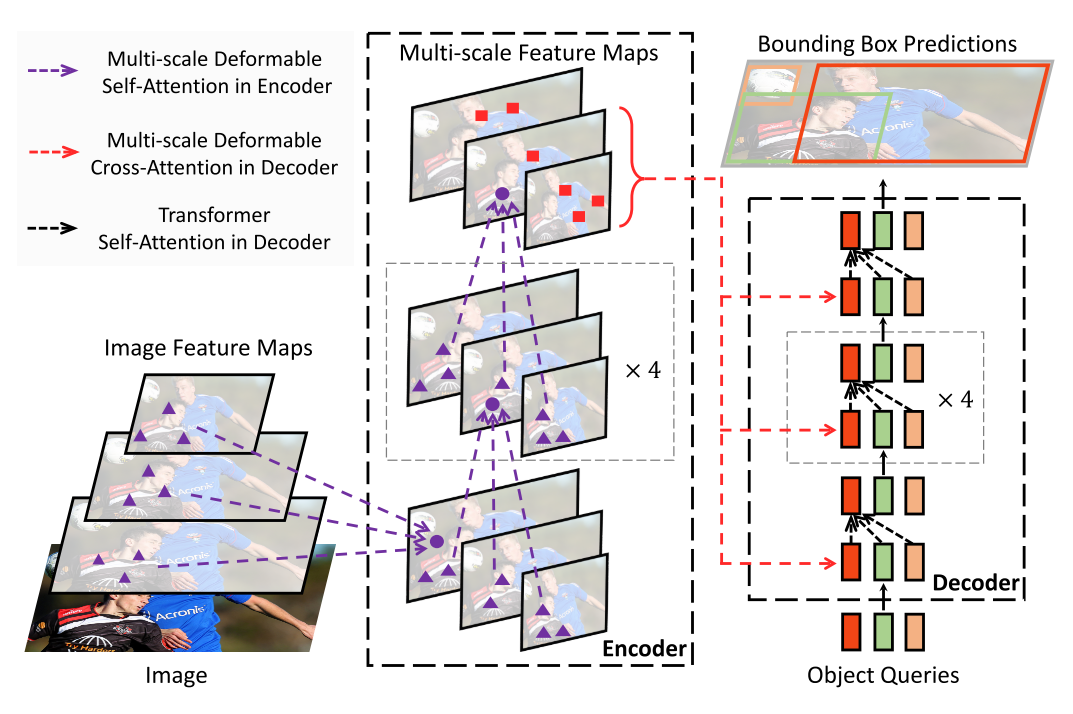
整体流程如下图。首先,一张图像传过来要做的第一件事,就是用backbone提取特征。现在做目标检测流行的事情就是多尺度特征提取,这也是Deformable DETR里的重点之一。比如下图,分别提取了3个层级特征图(代码里是4层)。但这里有个问题,Transform是有位置编码的,但很显然不同层级的每个点在归一化之后位置是一样的,所以还需要加上层级位置编码(在代码里这还是个可学习的参数)。
中间的Encoder就是对3个层级的特征图上每个点进行采样。上面不是说了嘛,跟每个点做Transform计算太费资源了,所以每个点采样几个点做Transform计算。代码里是每个点采样4个点,有小伙伴肯定问,woc?这么少!这能行?!结果告诉你是OK的,而且比跟全部计算的效果还好!那为什么是采样4个,不是2个?8个?16个?… 那就归咎于神经网络的玄学了… 中间的×4意思是注意力机制做了4遍,最后得到每个层级每个点对应的向量,就是每个点对应的特征是什么。
在右边的Decoder里,将encoder的结果做了交叉注意力,然后再做自注意力。在原始的DERT里是每张图绘制100个锚框,这里作者表示不够不够,绘制了300个锚框。
下图详细讲一下Encoder模块,这里为了方便理解这样画的,因为在代码里,特征图经过Transform都是展开成一个序列进行计算的,但是那样画图就有点抽象了,不好理解。这里先输入一张特征图(理论上是序列,这里只是方便理解这么画的),经过一个全连接得到Transform里的Value,这里输出3个head是注意力机制头。
Value有了,那Query呢?在图的上面(这里的Query其实和下面输入的特征图是一个东西,但是这里就画的是序列),也经过一个全连接获得3个采样点的偏移位置(代码里是4个)。这个偏移位置我解释一下,比如你取一个点的坐标是(30,30),这时候你获得它3个采样点的偏移位置分别是(1,1),(1,2),(-2,-1),那么它分别是(31,31),(31,32),(28,29)。
这3个采样点有了,但是感觉可以更优化一下。这3个采样点的重要性一样吗?好像不一定吧。作者给Query又连了一个全连接+Softmax计算了3个采样的权重。这样再给采样点进行加权求和,得到3个头所对应的特征。最后连个全连接层得到输出。
代码
configs
首先到tools/train.py里配置一下参数, 我用的是这个
../configs/deformable_detr/deformable-detr_r50_16xb2-50e_coco.py
运行后大概率会报错,常见的就是路径问题,我这里给个通用的解决方法。
运行train.py后会在路径tools/下生成一个work_dirs/deformable-detr_r50_16xb2-50e_coco/deformable-detr_r50_16xb2-50e_coco.py文件,将deformable-detr_r50_16xb2-50e_coco.py文件改个名字,比如my_deformable-detr_r50_16xb2-50e_coco.py,然后放在自己指定的路径下,比如我会放在configs/deformable_detr/my_deformable-detr_r50_16xb2-50e_coco.py。
这个配置文件里会包含所有的配置,不用自己一个一个找了,然后看一下这个配置文件里的路径。比如train_dataloader里的ann_file、data_root路径有没有问题,搞不懂相对路径的直接用绝对路径替换就行。别的配置基本不用改,如果你看得懂可以自己改一下。我好像是啥也没改,我是根据官方的路径放我的数据集的,所以没改路径好像。
那么既然改了我的config文件,那配置参数也得改一下,改成自己的那个就行。
../configs/deformable_detr/my_deformable-detr_r50_16xb2-50e_coco.py
backbone
首先跳入到mmdet/models/detectors/base_detr.py里DetectionTransformer的方法loss中。
def loss(self, batch_inputs: Tensor,batch_data_samples: SampleList) -> Union[dict, list]:img_feats = self.extract_feat(batch_inputs)head_inputs_dict = self.forward_transformer(img_feats,batch_data_samples)losses = self.bbox_head.loss(**head_inputs_dict, batch_data_samples=batch_data_samples)return losses
self.extract_feat就是基础的提取特征模块,进去看看怎么操作的。这里用的是resnet50(可在配置文件里自己设置)。来到路径mmdet/models/backbones/resnet.py里ResNet下的方法forward。
def forward(self, x):"""Forward function."""if self.deep_stem:x = self.stem(x)else:x = self.conv1(x)x = self.norm1(x)x = self.relu(x)x = self.maxpool(x)outs = []for i, layer_name in enumerate(self.res_layers):res_layer = getattr(self, layer_name)x = res_layer(x)if i in self.out_indices:outs.append(x)return tuple(outs)
resnet模块很简单的,就是基础的conv->BN->relu三件套。for循环里有4个层级,并且后3个层级的结果都会放到out中。最终,outs存放着三个层级的输出{(b,512,h,w),(b,1024,h/2,w/2),(b,2048,h/4,w/4)},分别表示从浅到深的层级特征。(这里的hw并不表示图片的原来尺寸,只是为了方便表示后面层级的输出图片size相对于前面size的比例)
在extract_feat里做完backbone还有一个neck层。
def extract_feat(self, batch_inputs: Tensor) -> Tuple[Tensor]:x = self.backbone(batch_inputs)if self.with_neck:x = self.neck(x)return x
这个neck层并没有什么特殊的,只是对最后一层的输出再多做一层特征提取,进去看一下。在路径mmdet/models/necks/channel_mapper.py下ChannelMapper的方法forward中。
def forward(self, inputs: Tuple[Tensor]) -> Tuple[Tensor]:assert len(inputs) == len(self.convs)outs = [self.convs[i](inputs[i]) for i in range(len(inputs))]if self.extra_convs:for i in range(len(self.extra_convs)):if i == 0:outs.append(self.extra_convs[0](inputs[-1]))else:outs.append(self.extra_convs[i](outs[-1]))return tuple(outs)
可以看到,先对三个输出层的数据先进行了一波conv,它将每层的输出特征图的个数都转为了256。并对最后一层又走了一遍convs模块,最终返回的outs存放了4个层级的输出{(b,256,h,w),(b,256,h/2,w/2),(b,256,h/4,w/4),(b,256,h/8,w/8)}。
=======================================================================
ok,回到最初的位置,现在往下看self.forward_transformer。
transformer
在路径mmdet/models/detectors/base_detr.py下DetectionTransformer的方法forward_transformer。
def forward_transformer(self,img_feats: Tuple[Tensor],batch_data_samples: OptSampleList = None) -> Dict:encoder_inputs_dict, decoder_inputs_dict = self.pre_transformer(img_feats, batch_data_samples)encoder_outputs_dict = self.forward_encoder(**encoder_inputs_dict)tmp_dec_in, head_inputs_dict = self.pre_decoder(**encoder_outputs_dict)decoder_inputs_dict.update(tmp_dec_in)decoder_outputs_dict = self.forward_decoder(**decoder_inputs_dict)head_inputs_dict.update(decoder_outputs_dict)return head_inputs_dict
这波代码基本就是全流程了,这里还画了个图,非常形象,如下。
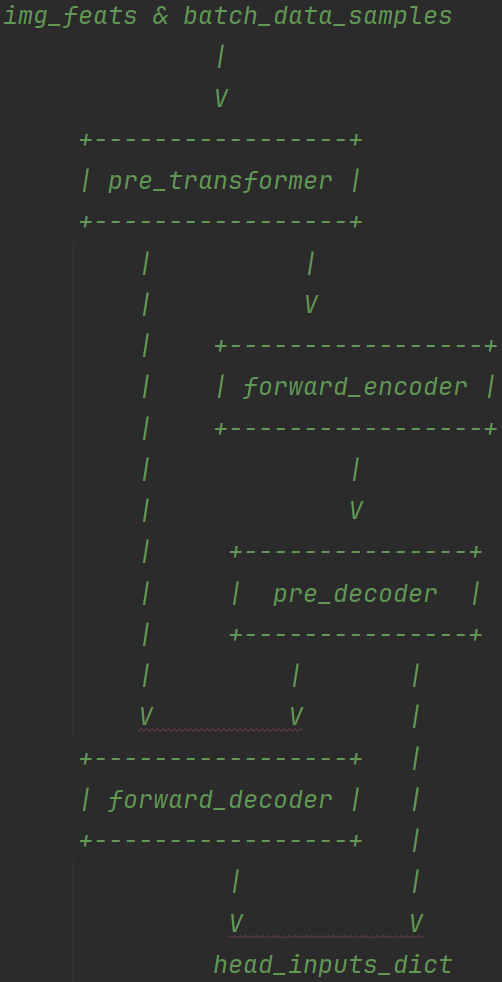
这里我会一步一步debug到pre_transformer、forward_encoder、pre_decoder和forward_decoder讲解内容。
首先来到路径mmdet/models/detectors/deformable_detr.py下DeformableDETR的方法pre_transformer中。
def pre_transformer(self,mlvl_feats: Tuple[Tensor],batch_data_samples: OptSampleList = None) -> Tuple[Dict]:batch_size = mlvl_feats[0].size(0)# construct binary masks for the transformer.assert batch_data_samples is not Nonebatch_input_shape = batch_data_samples[0].batch_input_shapeinput_img_h, input_img_w = batch_input_shapeimg_shape_list = [sample.img_shape for sample in batch_data_samples]same_shape_flag = all([s[0] == input_img_h and s[1] == input_img_w for s in img_shape_list])# support torch2onnx without feeding masksif torch.onnx.is_in_onnx_export() or same_shape_flag:...# 不用看else:masks = mlvl_feats[0].new_ones((batch_size, input_img_h, input_img_w))for img_id in range(batch_size):img_h, img_w = img_shape_list[img_id]masks[img_id, :img_h, :img_w] = 0mlvl_masks = []mlvl_pos_embeds = []for feat in mlvl_feats:mlvl_masks.append(F.interpolate(masks[None], size=feat.shape[-2:]).to(torch.bool).squeeze(0))mlvl_pos_embeds.append(self.positional_encoding(mlvl_masks[-1]))feat_flatten = []lvl_pos_embed_flatten = []mask_flatten = []spatial_shapes = []for lvl, (feat, mask, pos_embed) in enumerate(zip(mlvl_feats, mlvl_masks, mlvl_pos_embeds)):batch_size, c, h, w = feat.shapespatial_shape = torch._shape_as_tensor(feat)[2:].to(feat.device)# [bs, c, h_lvl, w_lvl] -> [bs, h_lvl*w_lvl, c]feat = feat.view(batch_size, c, -1).permute(0, 2, 1)pos_embed = pos_embed.view(batch_size, c, -1).permute(0, 2, 1)lvl_pos_embed = pos_embed + self.level_embed[lvl].view(1, 1, -1)# [bs, h_lvl, w_lvl] -> [bs, h_lvl*w_lvl]if mask is not None:mask = mask.flatten(1)feat_flatten.append(feat)lvl_pos_embed_flatten.append(lvl_pos_embed)mask_flatten.append(mask)spatial_shapes.append(spatial_shape)# (bs, num_feat_points, dim)feat_flatten = torch.cat(feat_flatten, 1)lvl_pos_embed_flatten = torch.cat(lvl_pos_embed_flatten, 1)# (bs, num_feat_points), where num_feat_points = sum_lvl(h_lvl*w_lvl)if mask_flatten[0] is not None:mask_flatten = torch.cat(mask_flatten, 1)else:mask_flatten = None# (num_level, 2)spatial_shapes = torch.cat(spatial_shapes).view(-1, 2)level_start_index = torch.cat((spatial_shapes.new_zeros((1,)), # (num_level)spatial_shapes.prod(1).cumsum(0)[:-1]))if mlvl_masks[0] is not None:valid_ratios = torch.stack( # (bs, num_level, 2)[self.get_valid_ratio(m) for m in mlvl_masks], 1)else:valid_ratios = mlvl_feats[0].new_ones(batch_size, len(mlvl_feats),2)encoder_inputs_dict = dict(feat=feat_flatten,feat_mask=mask_flatten,feat_pos=lvl_pos_embed_flatten,spatial_shapes=spatial_shapes,level_start_index=level_start_index,valid_ratios=valid_ratios)decoder_inputs_dict = dict(memory_mask=mask_flatten,spatial_shapes=spatial_shapes,level_start_index=level_start_index,valid_ratios=valid_ratios)return encoder_inputs_dict, decoder_inputs_dict
从名字就可以知道mlvl_feats是多尺度的特征图像,里面包含了四组数据。
我们先获取图像输入的形状input_img_h和input_img_w,但是很显然,每张图片不可能正好就是这个大小。所以我们建立一个mask,它的size为(input_img_h,input_img_w),初始化全为1。然后获取每张图片的实际大小img_h和img_w,将对应区域的mask值设置为 0,表示该区域是有效区域。
现在每张图片的mask有了,但是我们要处理的是mlvl_feats啊,这尺寸对不上啊。所以我们进入一个for循环,将每张图片的mask进行下采样,使其适配mlvl_feats里不同尺寸的特征图大小。mlvl_pos_embeds看名字就知道是加位置编码的。
现在mlvl_feats、mlvl_masks、mlvl_pos_embeds这些格式还是(...,h,w),但是我们要做transformer不能直接对(h,w)图像格式做啊,得拉长为h×w。所以我们进入一个for循环,将所有的数据格式都拉长,顺便调整一下维度,将h×w调到前面去。中间可以看到有一个加法操作,看名字就知道,位置编码pos_embed+层级编码level_embed。可以看一下这个level_embed,如下,可以看到这并不是一个固定值,是一个可以学习的参数。
self.level_embed = nn.Parameter(torch.Tensor(self.num_feature_levels, self.embed_dims))
为了方便后面计算,将四个层级的数据拼在一起。如何区分每个层级的数据呢?因为每个层级的长度是固定的嘛,h×w,所以计算一下每个层级开始的index,存放在level_start_index里。
get_valid_ratio是计算特征图在mask上的有效比例。上面不是说了,输入size是固定的,但是原图size不一定就是输入size,因此做了一个mask,0表示有效区域,1表示无效区域。然后又根据多尺度特征图的size对mask进行缩放。get_valid_ratio通过一个for循环计算mlvl_masks上四个不同尺度的高宽的有效比例。
encoder
路径mmdet/models/layers/transformer/deformable_detr_layers.py下DeformableDetrTransformerEncoder的方法forward里。
def forward(self, query: Tensor, query_pos: Tensor,key_padding_mask: Tensor, spatial_shapes: Tensor,level_start_index: Tensor, valid_ratios: Tensor,**kwargs) -> Tensor:reference_points = self.get_encoder_reference_points(spatial_shapes, valid_ratios, device=query.device)for layer in self.layers:query = layer(query=query,query_pos=query_pos,key_padding_mask=key_padding_mask,spatial_shapes=spatial_shapes,level_start_index=level_start_index,valid_ratios=valid_ratios,reference_points=reference_points,**kwargs)return query
我们现在要做Transformer,而Transformer序列上的token需要根据不同层级的特征图上的点做计算,但是不同层级的特征图的H和W不一样啊,它们的坐标对应关系也不一样。为了方便大家理解,我画了张图,如下。
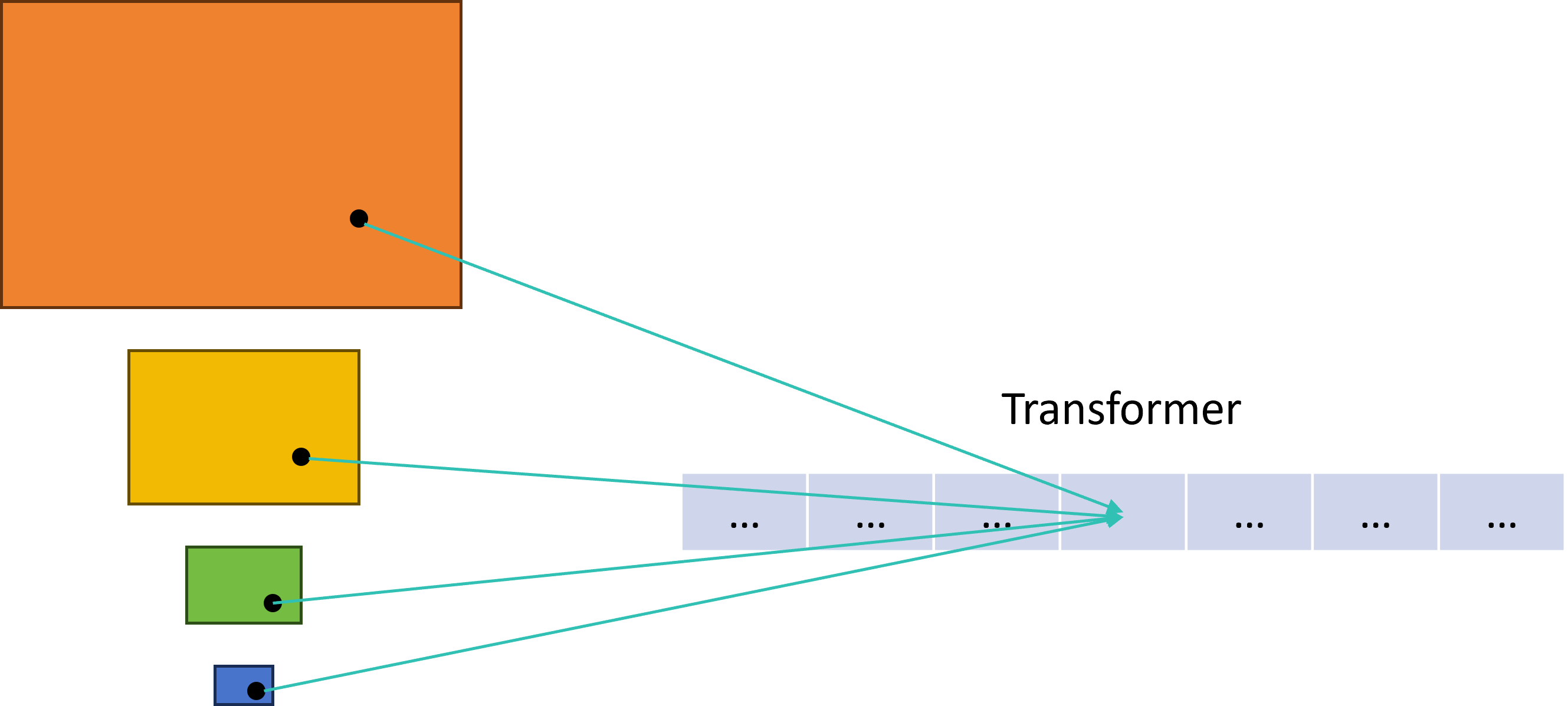
self.get_encoder_reference_points就是来计算特征图中每个位置相对于整个图像的位置(其实就是归一化),然后用这个参考点来计算Transformer序列上的值。来看看它怎么实现的。
def get_encoder_reference_points(spatial_shapes: Tensor, valid_ratios: Tensor,device: Union[torch.device, str]) -> Tensor:reference_points_list = []for lvl, (H, W) in enumerate(spatial_shapes):ref_y, ref_x = torch.meshgrid(torch.linspace(0.5, H - 0.5, H, dtype=torch.float32, device=device),torch.linspace(0.5, W - 0.5, W, dtype=torch.float32, device=device))ref_y = ref_y.reshape(-1)[None] / (valid_ratios[:, None, lvl, 1] * H)ref_x = ref_x.reshape(-1)[None] / (valid_ratios[:, None, lvl, 0] * W)ref = torch.stack((ref_x, ref_y), -1)reference_points_list.append(ref)reference_points = torch.cat(reference_points_list, 1)# [bs, sum(hw), num_level, 2]reference_points = reference_points[:, :, None] * valid_ratios[:, None]return reference_points
spatial_shapes里存放的是每个层级的H和W,for循环遍历它们。使用 torch.meshgrid生成每个特征图层级的网格坐标,ref_y和ref_x。valid_ratios里存放的是上面计算的垂直和水平方向上的有效比例,用于确保参考点映射到有效区域。最后将它们拼接在一起,然后根据每个层级的有效比例,调整参考点,最终返回reference_points的size为(b,n,4,2),表示4个层级和2个坐标xy。
=======================================================================
回到DeformableDetrTransformerEncoder的方法forward里。现在进入到一个for循环,来看看self.layers的构造。在路径mmdet/models/layers/transformer/detr_layers.py下DetrTransformerEncoderLayer的方法forward里。
def forward(self, query: Tensor, query_pos: Tensor,key_padding_mask: Tensor, **kwargs) -> Tensor:query = self.self_attn(query=query,key=query,value=query,query_pos=query_pos,key_pos=query_pos,key_padding_mask=key_padding_mask,**kwargs)query = self.norms[0](query)query = self.ffn(query)query = self.norms[1](query)return query
首先做了多尺度的自注意力,后面再连个标准化、全连接、标准化,这些就不说了,主要看重点对象self.self_attn。这里可以看到,传入的query、key、value都是query。进去看看怎么个事。这个路径在mmcv的包里,给个相对路径吧,自己的环境路径\Lib\site-packages\mmcv\ops\multi_scale_deform_attn.py下MultiScaleDeformableAttention的方法forward里。
def forward(self,query: torch.Tensor,key: Optional[torch.Tensor] = None,value: Optional[torch.Tensor] = None,identity: Optional[torch.Tensor] = None,query_pos: Optional[torch.Tensor] = None,key_padding_mask: Optional[torch.Tensor] = None,reference_points: Optional[torch.Tensor] = None,spatial_shapes: Optional[torch.Tensor] = None,level_start_index: Optional[torch.Tensor] = None,**kwargs) -> torch.Tensor:if value is None:value = queryif identity is None:identity = queryif query_pos is not None:query = query + query_posif not self.batch_first:# change to (bs, num_query ,embed_dims)query = query.permute(1, 0, 2)value = value.permute(1, 0, 2)bs, num_query, _ = query.shapebs, num_value, _ = value.shapeassert (spatial_shapes[:, 0] * spatial_shapes[:, 1]).sum() == num_valuevalue = self.value_proj(value)if key_padding_mask is not None:value = value.masked_fill(key_padding_mask[..., None], 0.0)value = value.view(bs, num_value, self.num_heads, -1)sampling_offsets = self.sampling_offsets(query).view(bs, num_query, self.num_heads, self.num_levels, self.num_points, 2)attention_weights = self.attention_weights(query).view(bs, num_query, self.num_heads, self.num_levels * self.num_points)attention_weights = attention_weights.softmax(-1)attention_weights = attention_weights.view(bs, num_query,self.num_heads,self.num_levels,self.num_points)if reference_points.shape[-1] == 2:offset_normalizer = torch.stack([spatial_shapes[..., 1], spatial_shapes[..., 0]], -1)sampling_locations = reference_points[:, :, None, :, None, :] \+ sampling_offsets \/ offset_normalizer[None, None, None, :, None, :]elif reference_points.shape[-1] == 4:sampling_locations = reference_points[:, :, None, :, None, :2] \+ sampling_offsets / self.num_points \* reference_points[:, :, None, :, None, 2:] \* 0.5else:raise ValueError(f'Last dim of reference_points must be'f' 2 or 4, but get {reference_points.shape[-1]} instead.')if ((IS_CUDA_AVAILABLE and value.is_cuda)or (IS_MLU_AVAILABLE and value.is_mlu)):output = MultiScaleDeformableAttnFunction.apply(value, spatial_shapes, level_start_index, sampling_locations,attention_weights, self.im2col_step)else:output = multi_scale_deformable_attn_pytorch(value, spatial_shapes, sampling_locations, attention_weights)output = self.output_proj(output)if not self.batch_first:# (num_query, bs ,embed_dims)output = output.permute(1, 0, 2)return self.dropout(output) + identity
identity是为了最后做残差连接的。query加上了位置编码,所以现在query和key、value是有区别的。给value做了一个全连接self.value_proj,毕竟value是通过query初始化来的,但是value并不是query,所以给value连个全连接做初始化(这地方比较神奇,跟传统的qkv的初始化方法不一样)。然后根据之前计算的mask,将无效区域赋值为0 ,不做计算。接着将维度分给8个注意力头。
self.sampling_offsets计算采样偏移,感觉是论文里非常核心的内容,但是做起来却非常简单,就是连了一个全连接。这个全连接的输入256那是固定的,但是输出256是有讲究的。我们需要计算4个层级的特征图,每张特征图上的每个点需要计算出4个偏移位置(采样点),每个偏移位置包括xy,而我们又有8个注意力头,那正好8×4×4×2=256。看一下我们计算出来的sampling_offsets在view后的的size为(b,n,8,4,4,2)。
self.attention_weights计算权重,也是论文核心内容,但也是很简单的操作。这次全连接的输出是128,表示8个注意力头,4个层级上的4个采样点的权重,8×4×4=128。计算出的attention_weights连一个softmax归一化,view后size为(b,n,8,4,4)。
上面两步我都感觉很神奇,仅仅用了query连两个全连接就得到了采样点的偏移位置和采样点的权重,但是论文也没解释为什么这样就可行。
现在我们有4个层级上每个点的4个偏移位置了,那就可以计算出采样点的实际位置了。首先看一下偏移位置信息sampling_offsets,可以看到里面的值都是些(1,0)、(2,0)...这些类型的,一看就是绝对位置的偏移值,所以先给它归一化,offset_normalizer里放的就是每个层级的尺寸。因为reference_points里的值是归一化后的结果,所以这么一加,ok。
现在我们要走一个MultiScaleDeformableAttnFunction,但是这里被封装起来了,看不见源码,所以我去Deformable-DETR/models/ops/functions/ms_deform_attn_func.py找了一下。
def ms_deform_attn_core_pytorch(value, value_spatial_shapes, sampling_locations, attention_weights):# for debug and test only,# need to use cuda version insteadN_, S_, M_, D_ = value.shape_, Lq_, M_, L_, P_, _ = sampling_locations.shapevalue_list = value.split([H_ * W_ for H_, W_ in value_spatial_shapes], dim=1)sampling_grids = 2 * sampling_locations - 1sampling_value_list = []for lid_, (H_, W_) in enumerate(value_spatial_shapes):# N_, H_*W_, M_, D_ -> N_, H_*W_, M_*D_ -> N_, M_*D_, H_*W_ -> N_*M_, D_, H_, W_value_l_ = value_list[lid_].flatten(2).transpose(1, 2).reshape(N_*M_, D_, H_, W_)# N_, Lq_, M_, P_, 2 -> N_, M_, Lq_, P_, 2 -> N_*M_, Lq_, P_, 2sampling_grid_l_ = sampling_grids[:, :, :, lid_].transpose(1, 2).flatten(0, 1)# N_*M_, D_, Lq_, P_sampling_value_l_ = F.grid_sample(value_l_, sampling_grid_l_,mode='bilinear', padding_mode='zeros', align_corners=False)sampling_value_list.append(sampling_value_l_)# (N_, Lq_, M_, L_, P_) -> (N_, M_, Lq_, L_, P_) -> (N_, M_, 1, Lq_, L_*P_)attention_weights = attention_weights.transpose(1, 2).reshape(N_*M_, 1, Lq_, L_*P_)output = (torch.stack(sampling_value_list, dim=-2).flatten(-2) * attention_weights).sum(-1).view(N_, M_*D_, Lq_)return output.transpose(1, 2).contiguous()
value_list里存放了每个层级的尺度大小。sampling_locations的值是归一化后的,所以取值范围是[0,1],sampling_grids将采样范围规划到[-1,1]。
for循环遍历这四个层级。先对value展平、转置和reshape,得到size为(8×b,32,h,w)。同理,对sampling_grids也进行此操作,得到size为(8×b,n,4,2)。F.grid_sample在value里根据给定的sampling_grids采样坐标进行采样,并使用双线性插值进行采样,每个采样点的值将基于其四个邻近像素的值进行加权平均。这个怎么理解呢,你这样想象一下。对于每个查询点query,它需要采样四个点做关系计算,这四个点的位置已知,在sampling_grid_l_里。于是它根据坐标位置在value_l_对应的特征图上找它的特征值(因为value_l_的size是(...,h,w),sampling_grid_l_的size是(...,xy),根据xy坐标在hw尺寸的图上找到对应位置,这个应该能理解吧)。但是它还转个弯,它不直接按xy坐标位置去找对应的特征值,它根据xy周边的4个点进行加权平均计算出该位置的特征值。(这块我理解了好久,因为debug不进去,只能想象)
处理完采样点,采样权重的形状得和采样点一样,所以也转置reshape一下。将采样点堆叠在一起,然后展平与采样权重加权求和,并reshape回原来的size,返回的size为(b,n,256)。
=======================================================================
回到MultiheadAttention的方法forward,下面就很简单了。连个全连接,做个残差连接返回结果。这个过程还要重复好几次,好像做了是6层,做完encoder就可以做decoder了。
Decoder
在路径mmdet/models/detectors/deformable_detr.py下DeformableDETR的方法pre_decoder。
def pre_decoder(self, memory: Tensor, memory_mask: Tensor,spatial_shapes: Tensor) -> Tuple[Dict, Dict]:batch_size, _, c = memory.shapeif self.as_two_stage:...# 没用 不看else:enc_outputs_class, enc_outputs_coord = None, Nonequery_embed = self.query_embedding.weightquery_pos, query = torch.split(query_embed, c, dim=1)query_pos = query_pos.unsqueeze(0).expand(batch_size, -1, -1)query = query.unsqueeze(0).expand(batch_size, -1, -1)reference_points = self.reference_points_fc(query_pos).sigmoid()decoder_inputs_dict = dict(query=query,query_pos=query_pos,memory=memory,reference_points=reference_points)head_inputs_dict = dict(enc_outputs_class=enc_outputs_class,enc_outputs_coord=enc_outputs_coord) if self.training else dict()return decoder_inputs_dict, head_inputs_dict
可以看到query_embed的size为(300,512),原始Dert每次预测100个检测框,这里增加到了300个。这里query_embed的512维切成两块,query和query_pos,两个平分秋色,各拿走256维。给query_pos连了一个全连接层,输出size为(b,300,2),将原本256维转为2维,代表预测每个查询位置的xy坐标。做个sigmoid激活,将输出限制在[0,1],就是归一化坐标。
根据流程,pre_decoder做完之后是forward_decoder。来到路径mmdet/models/detectors/deformable_detr.py下DeformableDETR的方法forward_decoder。
def forward_decoder(self, query: Tensor, query_pos: Tensor, memory: Tensor,memory_mask: Tensor, reference_points: Tensor,spatial_shapes: Tensor, level_start_index: Tensor,valid_ratios: Tensor) -> Dict:inter_states, inter_references = self.decoder(query=query,value=memory,query_pos=query_pos,key_padding_mask=memory_mask, # for cross_attnreference_points=reference_points,spatial_shapes=spatial_shapes,level_start_index=level_start_index,valid_ratios=valid_ratios,reg_branches=self.bbox_head.reg_branchesif self.with_box_refine else None)references = [reference_points, *inter_references]decoder_outputs_dict = dict(hidden_states=inter_states, references=references)return decoder_outputs_dict
首先我们来看一下self.decoder的内容,来到路径mmdet/models/layers/transformer/deformable_detr_layers.py里DeformableDetrTransformerDecoder的方法forward中。
def forward(self,query: Tensor,query_pos: Tensor,value: Tensor,key_padding_mask: Tensor,reference_points: Tensor,spatial_shapes: Tensor,level_start_index: Tensor,valid_ratios: Tensor,reg_branches: Optional[nn.Module] = None,**kwargs) -> Tuple[Tensor]:output = queryintermediate = []intermediate_reference_points = []for layer_id, layer in enumerate(self.layers):if reference_points.shape[-1] == 4:... # 不是 不看else:assert reference_points.shape[-1] == 2reference_points_input = \reference_points[:, :, None] * \valid_ratios[:, None]output = layer(output,query_pos=query_pos,value=value,key_padding_mask=key_padding_mask,spatial_shapes=spatial_shapes,level_start_index=level_start_index,valid_ratios=valid_ratios,reference_points=reference_points_input,**kwargs)if reg_branches is not None:... # Noneif self.return_intermediate:intermediate.append(output)intermediate_reference_points.append(reference_points)if self.return_intermediate:return torch.stack(intermediate), torch.stack(intermediate_reference_points)return output, reference_points
这里一个for循环遍历self.layers,这里的self.layers也是六层,不过东西比encoder多了,它不仅有多尺度的自注意力,还有交叉注意力。这六层每一次的结果都会被保存下来。
reference_points和valid_ratios在对应的宽度和高度上相乘,得到一个新的张量reference_points_input,size为 (b,300,4,2)。每个查询在4个层级下的参考点坐标都会根据该层级的有效区域比例进行调整。比如,如果某个层级的有效区域比率为 0.5,则该层级对应的参考点坐标会缩放到原来的 50% 的范围内。
ok,主要是说这个layer。在路径mmdet/models/layers/transformer/detr_layers.py下DetrTransformerDecoderLayer的方法forward。
def forward(self,query: Tensor,key: Tensor = None,value: Tensor = None,query_pos: Tensor = None,key_pos: Tensor = None,self_attn_mask: Tensor = None,cross_attn_mask: Tensor = None,key_padding_mask: Tensor = None,**kwargs) -> Tensor:query = self.self_attn(query=query,key=query,value=query,query_pos=query_pos,key_pos=query_pos,attn_mask=self_attn_mask,**kwargs)query = self.norms[0](query)query = self.cross_attn(query=query,key=key,value=value,query_pos=query_pos,key_pos=key_pos,attn_mask=cross_attn_mask,key_padding_mask=key_padding_mask,**kwargs)query = self.norms[1](query)query = self.ffn(query)query = self.norms[2](query)return query
首先做个自注意力,在自己的环境路径\Lib\site-packages\mmcv\cnn\bricks\transformer.py下MultiheadAttention的forward。
def forward(self,query,key=None,value=None,identity=None,query_pos=None,key_pos=None,attn_mask=None,key_padding_mask=None,**kwargs):if key is None:key = queryif value is None:value = keyif identity is None:identity = queryif key_pos is None:if query_pos is not None:# use query_pos if key_pos is not availableif query_pos.shape == key.shape:key_pos = query_poselse:warnings.warn(f'position encoding of key is'f'missing in {self.__class__.__name__}.')if query_pos is not None:query = query + query_posif key_pos is not None:key = key + key_posif self.batch_first:query = query.transpose(0, 1)key = key.transpose(0, 1)value = vspose(0, 1)out = self.attn(query=query,key=key,value=value,attn_mask=attn_mask,key_padding_mask=key_padding_mask)[0]if self.batch_first:out = out.transpose(0, 1)return identity + self.dropout_layer(self.proj_drop(out))
很简单,这里的query、key和value一开始都是query。query和key的位置编码都是上面平分秋色的query_pos。加上位置编码后做自注意力,这里的self.attn是nn模块里的东西很简单,就是300个兄弟自己先做个自注意力。最后做个残差连接返回。
=======================================================================
回到DetrTransformerDecoderLayer的方法forward。下面走了个标准化,ok,来到交叉注意力。可以看的这里的query还是decoder的300个打工仔,value则是encoder的输出,这里就有了一个跨越了,不是自己和自己人计算了。来看看怎么做的,在自环境路径\Lib\site-packages\mmcv\ops\multi_scale_deform_attn.py下MultiScaleDeformableAttention的方法forward。是不是很眼熟,这块和上面encoder计算自注意力走的一样的forward,只不过上次query和value初始都是query,而这次的value可不是query了,这里不重复讲代码了。
=======================================================================
回到DeformableDetrTransformerDecoder的方法forward中。self.layers有6层,同样的事情会做6遍,intermediate和intermediate_reference_points存放中间的结果。最终回到DeformableDETR的forward_decoder,这些数据会打包好存放在decoder_outputs_dict里返回。
Loss
mmdet/models/dense_heads/deformable_detr_head.py里DeformableDETRHead的方法loss。
def loss(self, hidden_states: Tensor, references: List[Tensor],enc_outputs_class: Tensor, enc_outputs_coord: Tensor,batch_data_samples: SampleList) -> dict:batch_gt_instances = []batch_img_metas = []for data_sample in batch_data_samples:batch_img_metas.append(data_sample.metainfo)batch_gt_instances.append(data_sample.gt_instances)outs = self(hidden_states, references)loss_inputs = outs + (enc_outputs_class, enc_outputs_coord,batch_gt_instances, batch_img_metas)losses = self.loss_by_feat(*loss_inputs)return losses
从上面打包好的decoder_outputs_dict里拆出hidden_states和references。hidden_states存放的是刚刚6层预测的300个锚框特征数据,每个锚框数据的特征维度为256,size为(6,b,300,256)。references存放的是每一层预测出来的300个锚框xy坐标,每个list的size为(b,300,2)。看一下self是如何处理这两个数据的,来到路径mmdet/models/layers/transformer/deformable_detr_layers.py里DeformableDETRHead下的方法forward中。
def forward(self, hidden_states: Tensor,references: List[Tensor]) -> Tuple[Tensor, Tensor]:all_layers_outputs_classes = []all_layers_outputs_coords = []for layer_id in range(hidden_states.shape[0]):reference = inverse_sigmoid(references[layer_id])# NOTE The last reference will not be used.hidden_state = hidden_states[layer_id]outputs_class = self.cls_branches[layer_id](hidden_state)tmp_reg_preds = self.reg_branches[layer_id](hidden_state)if reference.shape[-1] == 4:tmp_reg_preds += reference # 不看else:assert reference.shape[-1] == 2tmp_reg_preds[..., :2] += referenceoutputs_coord = tmp_reg_preds.sigmoid()all_layers_outputs_classes.append(outputs_class)all_layers_outputs_coords.append(outputs_coord)all_layers_outputs_classes = torch.stack(all_layers_outputs_classes)all_layers_outputs_coords = torch.stack(all_layers_outputs_coords)return all_layers_outputs_classes, all_layers_outputs_coords
for循环遍历6层数据,获取每层对应的hidden_state和reference。hidden_state会走两个分支,分类和回归。self.cls_branches是用于分类的,输出80个类别的概率;self.reg_branches是用于回归的,得到锚框的四个坐标值xywh。这里我们不是two_stage,所以只有xy的数据,加上reference,获得偏移位置。最后将坐标映射回 [0,1] 区间,存放在对应列表中,返回。
计算损失的方法跟DETR差不多,求预测框与真实框大小和位置的差异。来到路径mmdet/models/task_modules/assigners/hungarian_assigner.py里HungarianAssigner的方法assign。
def assign(self,pred_instances: InstanceData,gt_instances: InstanceData,img_meta: Optional[dict] = None,**kwargs) -> AssignResult:assert isinstance(gt_instances.labels, Tensor)num_gts, num_preds = len(gt_instances), len(pred_instances)gt_labels = gt_instances.labelsdevice = gt_labels.device# 1. assign -1 by defaultassigned_gt_inds = torch.full((num_preds,),-1,dtype=torch.long,device=device)assigned_labels = torch.full((num_preds,),-1,dtype=torch.long,device=device)if num_gts == 0 or num_preds == 0:# 不看# 2. compute weighted costcost_list = []for match_cost in self.match_costs:cost = match_cost(pred_instances=pred_instances,gt_instances=gt_instances,img_meta=img_meta)cost_list.append(cost)cost = torch.stack(cost_list).sum(dim=0)# 3. do Hungarian matching on CPU using linear_sum_assignmentcost = cost.detach().cpu()if linear_sum_assignment is None:raise ImportError('Please run "pip install scipy" ''to install scipy first.')matched_row_inds, matched_col_inds = linear_sum_assignment(cost)matched_row_inds = torch.from_numpy(matched_row_inds).to(device)matched_col_inds = torch.from_numpy(matched_col_inds).to(device)# 4. assign backgrounds and foregrounds# assign all indices to backgrounds firstassigned_gt_inds[:] = 0# assign foregrounds based on matching resultsassigned_gt_inds[matched_row_inds] = matched_col_inds + 1assigned_labels[matched_row_inds] = gt_labels[matched_col_inds]return AssignResult(num_gts=num_gts,gt_inds=assigned_gt_inds,max_overlaps=None,labels=assigned_labels)
gt_instances存放的是真实锚框的数据,包括锚框的位置和类别。pred_instances存放的是预测出来的300个锚框的信息。assigned_gt_inds和assigned_labels存放的是预测的300个框哪些框与真实框匹配的信息,后面详细说,这里先要初始化,全部赋值为-1。
self.match_costs存放的是配置文件里面定义的损失函数,分别是FocalLossCost、BBoxL1Cost和IoUCost。for循环会分别计算预测框与真实框的锚框的分类损失、xywh损失和iou损失。比如真实框有15个,那这300个预测框会分别和这15的真实框做损失计算。linear_sum_assignment是调用scipy包的,用来计算出这300个预测框匹配上的15个框。matched_row_inds存放的是300个预测框对应的id,matched_col_inds存放的是15个真实框对应的id。比如matched_row_inds的值为[8,18,...],matched_col_inds的值为[7,0,...],这就表示第8个预测框对应第7个真实框,以此类推。
ok,这里看到了刚刚初始化的assigned_gt_inds和assigned_labels,assigned_gt_inds和assigned_labels的size都是300。assigned_gt_inds将与真实框匹配的预测框赋值为真实框的id,assigned_labels复制为对应类别标签。
主要内容大概就这些…