人工智能---当机器人遇到大模型会产生火花吗?
1 背景
基础模型(Foundation Models)是近年来人工智能领域的重要突破,在自然语言处理和计算机视觉等领域取得了显著成果。将基础模型引入机器人学,有望从感知、决策和控制等方面提升机器人系统的性能,推动机器人学的发展。
随着大模型在智能汽车方面的快速应用,比如端到端大模型的上车量产,具身智能机器人也逐渐“卷”起了大模型,比如人形机器人公司也开始了大模型的应用,比如语音交互,比如人类动作的学习等等。

2 基础模型
本篇博客所介绍的论文更偏向综述类论文,主要介绍一些基础模型的发展,应用以及未来的挑战。
目前基础模型的研究主要包括以下几类:
- 大型语言模型(Large Language Models):如BERT、GPT-3、DeepSeek等,主要应用于自然语言处理任务。
- 视觉Transformer模型:如ViT、Swin Transformer等,主要应用于计算机视觉任务。
- 视觉-语言模型(Vision-Language Models):如CLIP、ALIGN等,通过跨模态对比学习实现视觉与语言的对齐。
- 视觉-语言-动作模型(Vision-Language-Action Models):主要用于智能汽车或者机器人领域。
- 具身多模态语言模型(Embodied Multimodal Language Models):如R3M,将视觉、语言与机器人动作相结合进行学习。
- 视觉生成模型(Visual Generative Models):如扩散模型和GAN等,用于视觉信号的生成。
2.1 基础信息
- 作者团队:来自斯坦福大学、普林斯顿大学、德州奥斯丁分校、英伟达、Scaled Foundations、谷歌 DeepMind、柏林工大、上海交大等多所知名高校和机构的研究人员。
- 研究目的:调查预训练基础模型在机器人学领域的应用,探索其如何提高机器人在感知、决策和控制领域的能力,以及分析阻碍机器人自主平台采用基础模型所面临的挑战,并为未来的进步提供机会和潜在途径。
2.2 主要内容
- 基础模型背景介绍:阐述了基础模型的相关概念,如 Transformer 架构、自回归模型、掩码自动编码、对比学习等技术细节,这些技术是基础模型实现强大性能的关键,同时也介绍了常用基础模型的量化方式,如通过上下文窗的大小、每层注意头的数量、每个头中注意向量的大小以及堆叠的注意层数等来衡量模型的规模。
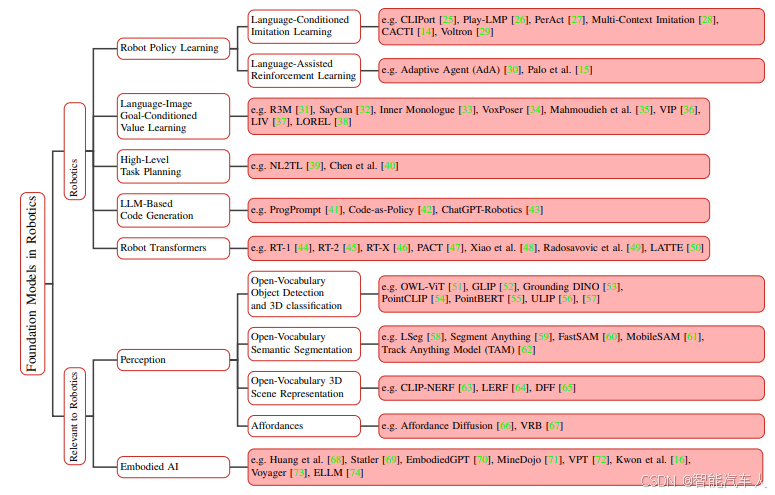
- 基础模型在机器人领域的应用 :
- 感知领域:大型视觉语言模型(VLM)可学习视觉和文本数据之间的关联,帮助完成零样本图像分类、零样本目标检测和 3D 分类等任务,增强机器人的空间意识,例如实现 3D 世界中的语言落地,将单词与 3D 环境中特定目标、位置或动作相关联。
- 决策或规划领域:大语言模型(LLM)和 VLM 能够协助机器人进行高层规划的任务规范,利用操作、导航和交互中的语言线索执行更复杂的任务。在模仿学习和强化学习等机器人策略学习技术中,基础模型可提高数据效率和增强上下文理解,如语言驱动的奖励可指导强化学习智能体,研究人员还利用语言模型为策略学习技术提供反馈。
- 面临的挑战 :
- 数据稀缺:难以获取用于机器人操纵、运动、导航等任务的大规模互联网数据,且利用这些数据进行自监督训练也存在困难。
- 高变化:物理环境、机器人平台和潜在任务的多样性,对基础模型的通用性提出了挑战,如何在保持通用性的同时适应各种变化是一个问题。
- 不确定性量化:需要处理实例级不确定性,如语言歧义或 LLM 幻觉,以及分布水平的不确定性和分布漂移,特别是由闭环机器人部署引起的不确定性。
- 安全评估:在部署前、整个生命周期的更新过程中以及机器人在目标环境中运行时,都需要严格测试基于基础模型的机器人系统的安全性。
- 实时性能:部分基础模型推理时间过长,阻碍了其在机器人上的部署,需要加快基础模型的推理速度以满足在线决策的要求。
2.3 研究价值
-
推动机器人技术发展:该论文系统地梳理了基础模型在机器人领域的应用现状和潜力,为研究人员和工程师提供了全面的参考,有助于推动机器人技术与基础模型的深度融合,促进机器人感知、决策和控制能力的进一步提升,推动机器人技术向更高水平的智能化发展。
-
明确未来研究方向:通过详细讨论所面临的挑战,为未来的研究工作指明了方向,激励学术界和工业界共同努力,探索创新的方法和技术,以克服这些挑战,实现基础模型在机器人领域的更广泛、更安全、更高效的应用,如开发更有效的数据收集和标注方法、设计更合理的模型架构和训练策略、建立更严格的安全评估体系等。
-
促进跨学科合作:机器人领域与计算机视觉、自然语言处理、机器学习等多个学科密切相关,本文的研究成果有助于促进这些学科之间的交叉合作,整合不同领域的知识和技术,共同攻克基础模型在机器人应用中的难题,为具身智能等前沿研究领域的发展提供有力支持 。
3 总结
基础模型通过在大规模数据上进行预训练,学习到了丰富的语义信息和世界知识。与传统的特定任务模型不同,基础模型具有较强的通用性和迁移能力,能够应用于多种不同的下游任务。一方面,基础模型能够作为机器人系统的先验知识,减少对任务特定数据的依赖;另一方面,基础模型可以作为机器人系统的通用组件,实现感知、推理和规划等核心功能。
科研实力强劲的企业或者研究单位更愿意进行基础模型的研究,后续通过API收费等形式进行回流,比如CHAT-GPT。像DeepSeek这种免费开源的确实不太常见(强烈点赞),但大部分企业还是以基础模型的应用为主,研发更个性化的产品。
参考论文《Foundation Models in Robotics: Applications, Challenges, and the Future》。