光伏电站巡检清扫飞行机器人设计cad【6张】三维图+设计说明书
光伏电站巡检清扫飞行机器人的设计
摘 要
随着新能源的开采和利用,光伏组件广泛的应用于太阳能发电领域。光伏电站在实际的运行过程中,空气中的灰尘和污垢不断的积累在光伏组件的表面,降低了太阳能发电元件的工作效率。需要经常清扫光伏组件的表面,减少外部环境因素对光伏组件的影响。目前常见的清洁方式主要是采用人工手动的清洁方式,其工作效率低,需要的成本比较高。
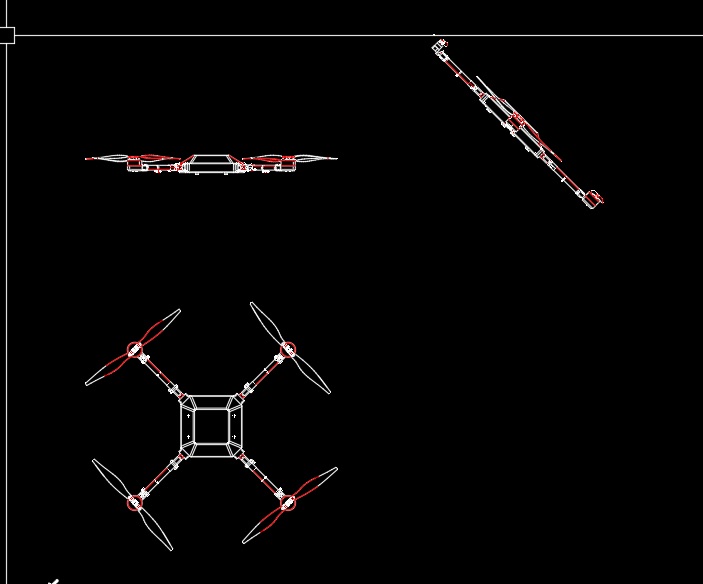
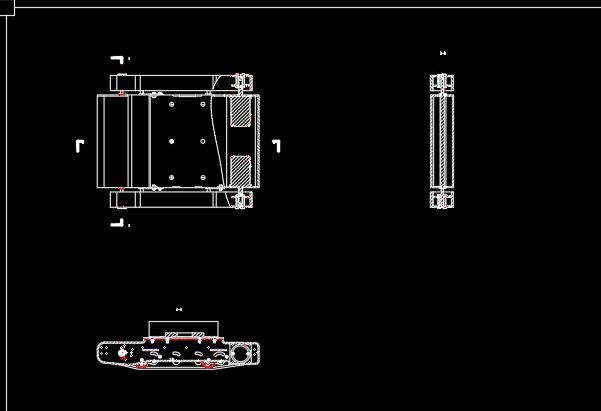
在上述背景下,本文提出了一种新型的光伏电站巡检清扫飞行机器人,主要用来解决光伏组件表面的灰尘问题。本次设计的清扫机器人主要有三部分组成,分别是空中飞行装置的设计、光伏板行走装置的设计、清扫机构的设计。采用清扫飞行机器人去清洁光伏组件表面灰尘的主要优点在于:清洁效率高、清洁设备智能化程度高、环境适应能力强。通过分析,本文完成了电机的选型计算,轴的设计及校核等相关理论计算。
通过分析计算,使用solidworks软件完成了光伏电站巡检清扫飞行机器人主要零部件的三维模型的绘制和主要零部件的绘制。完成了清扫机器人主要零部件的有限元分析。
关键词:光伏电站,飞行机器人,结构设计,solidworks
目 录
1 绪论 1
1.1 选题的背景及意义 1
1. 2 研究的现状 1
1.2.1 国外的研究现状 2
1.2.2 国外的研究现状 5
1.3 光伏面板主要的清洁方法 6
1.4 清扫飞行机器人未来的发展前景 7
1.4 本次设计主要研究内容 7
2 清扫机器人总体设计方案 8
2.1 设计要求和指标 8
2.2 整体设计方案 8
3 清扫机器人的机械结构设计 9
3.1 飞行装置的设计 9
3.1.1 动力系统的计算 9
3.1.2 机架尺寸的设计 10
3.2 连接装置的设计 11
3.2.1 电磁吸盘的设计 11
3.2.2 卡扣机构的设计 11
3.3 行走装置的设计 13
3.3.1 履带的设计 13
3.3.2 驱动轮的设计 14
3.3.3 电机功率的确定 15
3.4 真空吸盘的设计 16
4 机器人传动装置的设计 18
4.1 RV减速器的设计 18
4.1.1 基础参数 18
4.1.2 传动方案拟定 18
4.1.3 电机的选型 18
4.1.4 传动比的分配 19
4.1.5 轴的计算 19
4.1.6 一级齿轮的传动设计计算 20
4.1.7 摆线齿轮传动的设计计算 24
4.1.8 曲柄轴的设计计算 25
4.1.9 输入轴的设计计算 26
4.2 带传动的设计 26
4.3 轴承的选型及校核 28
6 清扫机器人控制系统的介绍 29
6.1 控制系统的功能要求 29
6.2 电机驱动原理 29
6.3 主控芯片的选型 31
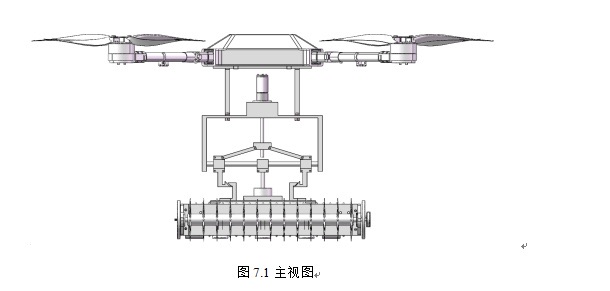
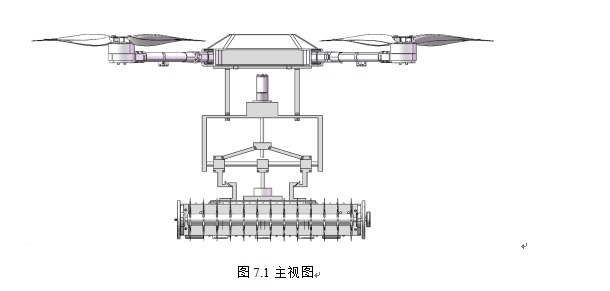
7 主要零部件的三维建模及有限元分析 32
7.1 Solidworks 32
7.2 主要零部件三维模型 32
7.3 底盘的有限元分析 35
7.3.1 设计方法 35
7.3.2 ansys简介 36
7.3.3 分析的目的 36
7.3.4 材料的选择 37
7.3.5 网格的划分 37
7.3.6 仿真分析与求解 39
总结 41
致 谢 42
文 献 参 考 43
1 绪论
1.1 选题的背景及意义
随着我国大量规模化光伏电站的落成,光伏组件巡检和清洁的工作量也越来越大,引起了诸多关注。据悉,在光伏电站系统中,光伏组件污渍、遮挡、热斑等问题占电站设备故障率的 50% 以上,若能及时发现这些问题并及时处理,电站的总体效率将大幅提升[1,22]。无人机通过自身优势能够对光伏电站进行快速巡检,实现巡检效率得进一步提升,同时也可以在一定程度内避免人员坠落等安全事故。无人机通过高清摄像头对屋顶状况,光伏组件和集电线路进行巡检,能够确保及时发现各项问题,对其相关隐患进行及时排查,实现损失的有效控制[3]。无人机不仅能够进行日常巡检,与此同时,通过搭载光电吊舱还可以对光伏组件进行红外巡检,确保能够及时发现异常发热组件[2]。当组件局部遮挡或损坏之后,会有热斑效应产生,进而造成发电单元转变为耗损单元,这不仅会在一定程度内损害组件寿命,同时还会对组串整体发电量造成很大程度上的不良影响。定期进行红外检测工作,能够确保在很大程度内控制由于组件损坏而导致的组件处理不高进而损失的电量。科学应用进行光伏电站巡检能够确保工作人员更为及时地发现组件损坏,有效降低工作难度,同时节省人工成本,实现工作效率的有效提升,在此过程中还可以帮助光伏电站更为高效地开展运维工作,有效解决工作难点问题[3]。
灰尘是影响光伏电池组件能量转换效率的关键因素之一[31],天气干燥,风沙较大,空气中的浮尘含量较多,增加了光伏组件的表面落尘量。此外,地区较少的降雨量,组件通过雨水的自清洁能力较差,导致光伏组件表面的灰尘落尘量相对较大。现阶段以人工清理作为当前光伏灰尘清洁的最主要方式[8],针对大型的光伏阵列或者光伏电站,人工清理所带来的人力劳动成本和水资源消耗却是一种负担,因此利用清洁机器人,有效的、经济的清扫光伏组件的积灰,对于提高光伏产业的经济效益至关重要。
1.2 研究的现状
目前光伏组件的故障监测一般通过以下2种方法进行:1) 通过监测组件发电时的输出电压和输出功率进行排查。该方法的缺点在于只能进行粗略排查,难以准确定位到具体的光伏组件,更难以找到电池片的内部故障。2) 借助所有故障都会表现为温度异常的特性,使用人工携带温度测量仪器,逐一对发热组件进行测量记录。该种方法可以发现各种故障导致的热斑,完成对光伏组件的精细检查;然而对于当前建筑面积大、组件数量多的规模性光伏电站而言,此方法效率非常低,并且由于人为检查的缘故主观性强、可靠性差。光伏电站传统的维护方式还是以人力为主,辅以监控系统[4,24];即使在后台监控系统中能实现对主要发电参数和气象数据的监控,但主要的现场巡检还是靠人工。并且由于光伏电站设备多、分布广,为防范环境因素和设备故障导致的各项事故,日常巡检是光伏电站运维管理中重要的环节,也是运维管理中最耗时耗力的工作。因此,如今应用在光伏电站的无人机多集中在光伏电站运维方面。由于无人机立体化、高程作业的方式有效适应光伏电站分布广、种类多的特点,在很大程度上节省了人力,提高了运维效率。但也应该承认,目前光伏电站无人机还有解决方案单一、功能针对性不强、数据处理能力有限等问题,仅仅只能解决问题表象,没有系统性的方案输出,没有真正解决光伏行业的“重点”[7]。针对上述巡检方法的不足,近年来,通过无人机搭载高清摄像头或红外热成像仪对光伏电站进行监测的方法开始兴起。但是因为整个巡检系统复杂、投入大,而且对运维人员的专业技能要求高,只适合在超大规模光伏电站中使用,目前在绝大多数光伏电站中还少有运用;有的巡检系统还存在自动化程度低的情况[5]。不同于其他行业,光伏电站既具备传统电力的特征,也具有自身的特点,需要无人机拥有针对性的技术方案。并且对于大规模光伏电站,单个巡检无人机的性能要求更高,对于光伏巡检无人机的操作方式应简单化,光伏电站巡检的操作方式可以使用移动终端(如手机,平板等)进行控制。可以通过飞行航线规划来实现无人机的自动飞行巡检,而无需过多的人为干预。这样方便在任何条件下都能够实现对无人机的操控[6,25]。除此之外,光伏电站的巡检无人机需要更强的动力以及续航能力以保证其能搭载更高规格的相机系统、红外系统、定位系统、数据传输以及图像处理系统。
1.2.1 国外的研究现状
在欧美地区,光伏发展迅速,技术成熟,在研制阶段预想到因光伏板的表面存在静电问题,使得灰尘发生堆积,那是已经对光伏表面的清洁问题进行了探索与研究。在清洁技术中,最为基础且应用最广泛的为机械除尘[15-16]。
Moharram 公司设计了一套全新的清洗系统,如图1.1所示,他的清洁系统是在光伏面板的顶端安装了一排有细孔的 PV 管,在清水中加入阴离子和阳离子表面活性剂的混合物,通过外部的水泵压力对光伏面板的冲击从而达到对光伏面板清洗的目的[17]。国外的学者 Kandil和其团队通过同样的原理也设计了一款类似的光伏清洁设备[18]。