基于亚博K210开发板——六轴姿态传感器水平测试板验证
开发板
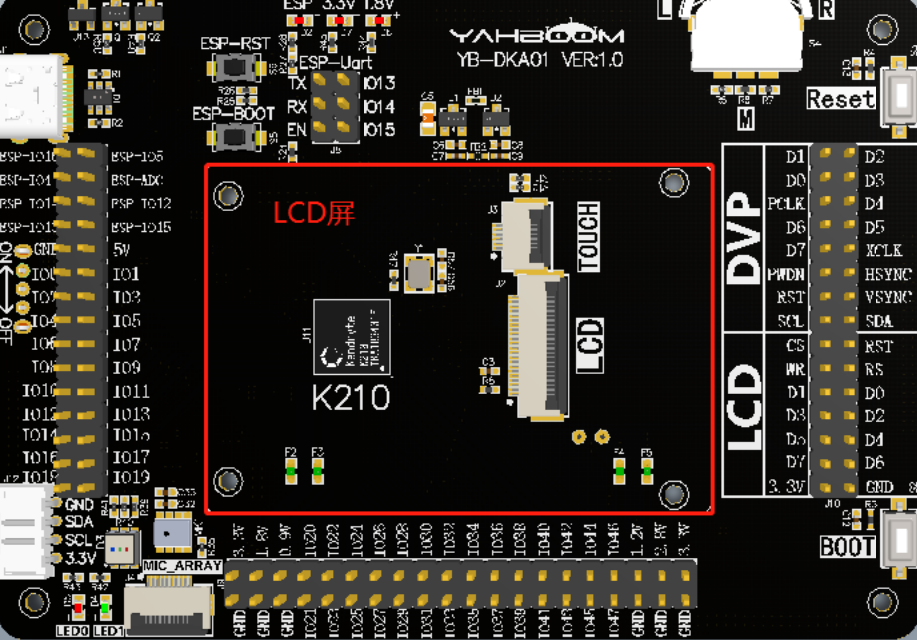
亚博K210开发板

实验目的
本次测试主要学习K210六轴姿态传感器结合显示屏做一个水平测试板的功能。
实验元件
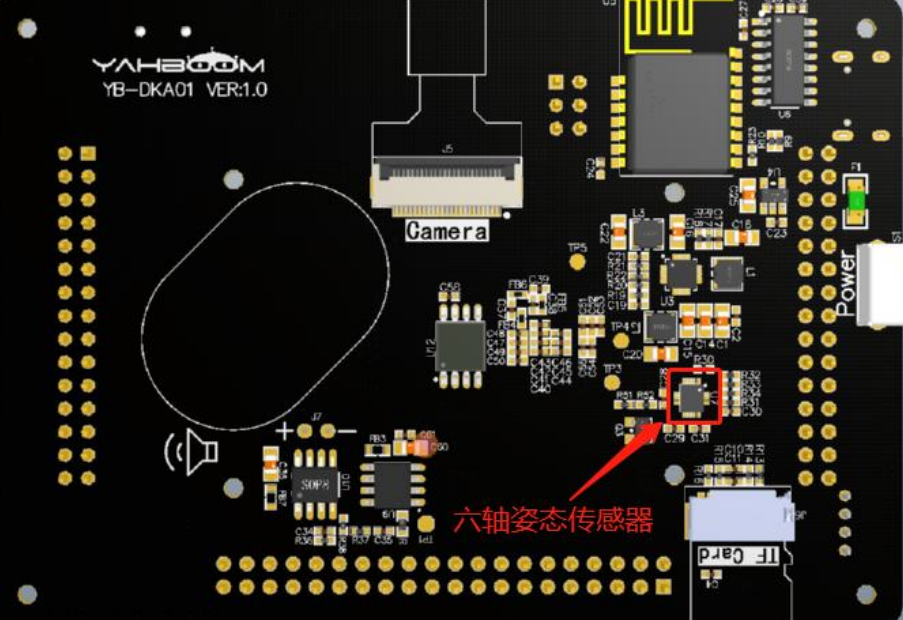
LCD 显示屏、六轴姿态传感器
实验原理
六轴姿态传感器 ICM20607 能够提供当前开发板的姿态数据,根据 ICM20607提供的数据,经过四元数计算方法,得到 K210 开发板的俯仰角和翻滚角,根据这两个角度数据,从而判断 K210 开发板当前的姿态。在 lvgl 图形化中显示一个机器人图标,如果 K210 开发板是平放的,则让机器人图标显示在中间,如果 K210开发板因为摆动改变了本身的姿态,则机器人图标也会跟着移动。
实验过程
- 首先根据上面的硬件连接引脚图,K210 的硬件引脚和软件功能使用的是FPIOA 映射关系。
#define PIN_ICM_SCL (9)
#define PIN_ICM_SDA (10)
#define PIN_ICM_INT (11)#define PIN_LCD_CS (36)
#define PIN_LCD_RST (37)
#define PIN_LCD_RS (38)
#define PIN_LCD_WR (39)/*****************************SOICMWARE-GPIO********************************/
// 软件GPIO口,与程序对应
#define LCD_RST_GPIONUM (0)
#define LCD_RS_GPIONUM (1)#define ICM_INT_GPIONUM (2)/*****************************FUNC-GPIO************************************/
// GPIO口的功能,绑定到硬件IO口
#define FUNC_ICM_INT (FUNC_GPIOHS0 + ICM_INT_GPIONUM)
#define FUNC_ICM_SCL (FUNC_I2C0_SCLK)
#define FUNC_ICM_SDA (FUNC_I2C0_SDA)#define FUNC_LCD_CS (FUNC_SPI0_SS3)
#define FUNC_LCD_RST (FUNC_GPIOHS0 + LCD_RST_GPIONUM)
#define FUNC_LCD_RS (FUNC_GPIOHS0 + LCD_RS_GPIONUM)
#define FUNC_LCD_WR (FUNC_SPI0_SCLK)void hardware_init(void)
{/* I2C ICM20607 */fpioa_set_function(PIN_ICM_SCL, FUNC_ICM_SCL);fpioa_set_function(PIN_ICM_SDA, FUNC_ICM_SDA);/* SPI lcd */fpioa_set_function(PIN_LCD_CS, FUNC_LCD_CS);fpioa_set_function(PIN_LCD_RST, FUNC_LCD_RST);fpioa_set_function(PIN_LCD_RS, FUNC_LCD_RS);fpioa_set_function(PIN_LCD_WR, FUNC_LCD_WR);sysctl_set_spi0_dvp_data(1);
}
- 设置 LCD 的 IO 口电平电压为 1.8V。
static void io_set_power(void)
{/* 设置显示器电压为1.8V */sysctl_set_power_mode(SYSCTL_POWER_BANK6, SYSCTL_POWER_V18);
}- 初始化系统中断,使能系统全局中断
plic_init();
sysctl_enable_irq();
- 初始化显示器,并显示图片 1 秒。
lcd_init();
lcd_draw_picture_half(0, 0, 320, 240, gImage_logo);
sleep(1);
- 初始化 lvgl,并启动定时器
void lvgl_disp_init(void)
{lv_init();static lv_disp_buf_t disp_buf;static lv_color_t buf[LV_HOR_RES_MAX * 10];lv_disp_buf_init(&disp_buf, buf, NULL, LV_HOR_RES_MAX * 10);lv_disp_drv_t disp_drv; /*Descriptor of a display driver*/lv_disp_drv_init(&disp_drv); /*Basic initialization*/disp_drv.flush_cb = my_disp_flush; /*Set your driver function*/disp_drv.buffer = &disp_buf; /*Assign the buffer to the display*/lv_disp_drv_register(&disp_drv); /*Finally register the driver*/mTimer_init();
}- 定时器定时时间为每毫秒中断调用一次,在定时器中断函数中调用 lvgl的任务管理函数和时钟函数。
/* 定时器中断回调 */
static int timer_irq_cb(void * ctx)
{lv_task_handler();lv_tick_inc(1);return 0;
}/* 定时器初始化并启动定时器 */
static void mTimer_init(void)
{timer_init(TIMER_DEVICE_0);timer_set_interval(TIMER_DEVICE_0, TIMER_CHANNEL_0, 1e6);timer_irq_register(TIMER_DEVICE_0, TIMER_CHANNEL_0, 0, 1, timer_irq_cb, NULL);timer_set_enable(TIMER_DEVICE_0, TIMER_CHANNEL_0, 1);
}
- 创建机器人图标。那么如何自定义创建自己喜欢的图片呢?打开 lvgl 相关资料中的图像转化工具,解压并双击打开 lvgl_image_convert.exe 程序,然后点击图片路径,将自己喜欢的图片添加并转换成.c 文件,然后放入到项目中,最后使用 LV_IMG_DECLARE()声明即可使用。注意分辨率不能太大。
LV_IMG_DECLARE(img_robot)
lv_obj_t * image_robot;/* 创建机器人图标 */
void lvgl_creat_image(void)
{image_robot = lv_img_create(lv_scr_act(), NULL);lv_img_set_src(image_robot, &img_robot);lv_obj_align(image_robot, NULL, LV_ALIGN_IN_TOP_LEFT, -100, 0);
}
- 图标创建完成就要根据 ICM20607 传感器获取开发板的姿态角,根据姿态角来移动图像的位置。
int16_t lvgl_x, lvgl_y;while (1){/* 读取角度 */get_icm_attitude();/* 转化数据 */lvgl_x = lvgl_get_x(g_attitude.roll);lvgl_y = lvgl_get_y(g_attitude.pitch);/* 修改机器人图标的位置 */lvgl_move_image(lvgl_x, lvgl_y);msleep(1);}
- 这里使用的是四元数计算姿态角的方式,首先读取陀螺仪和加速度计的原始数据,再通过计算得到四元数。
void get_icm_attitude(void)
{icm_get_gyro();icm_get_acc();g_icm20607.accX = icm_acc_x;g_icm20607.accY = icm_acc_y;g_icm20607.accZ = icm_acc_z;g_icm20607.gyroX = icm_gyro_x;g_icm20607.gyroY = icm_gyro_y;g_icm20607.gyroZ = icm_gyro_z;get_attitude_angle(&g_icm20607, &g_attitude, DT); // 四元素算法
}- 利用归一化四元数和积分的方式计算得到四元数。
/* 四元素获取 dt:5MS左右 */
void get_attitude_angle(icm_data_t *p_icm, attitude_t *p_angle, float dt)
{vector_t Gravity, Acc, Gyro, AccGravity;static vector_t GyroIntegError = {0};static float KpDef = 0.8f;static float KiDef = 0.0003f;float q0_t, q1_t, q2_t, q3_t;float NormQuat;float HalfTime = dt * 0.5f;Gravity.x = 2 * (NumQ.q1 * NumQ.q3 - NumQ.q0 * NumQ.q2);Gravity.y = 2 * (NumQ.q0 * NumQ.q1 + NumQ.q2 * NumQ.q3);Gravity.z = 1 - 2 * (NumQ.q1 * NumQ.q1 + NumQ.q2 * NumQ.q2);// 加速度归一化,NormQuat = q_rsqrt(squa(p_icm->accX)+ squa(p_icm->accY) +squa(p_icm->accZ)); //归一后可化为单位向量下方向分量Acc.x = p_icm->accX * NormQuat;Acc.y = p_icm->accY * NormQuat;Acc.z = p_icm->accZ * NormQuat;//向量叉乘得出的值,叉乘后可以得到旋转矩阵的重力分量在新的加速度分量上的偏差AccGravity.x = (Acc.y * Gravity.z - Acc.z * Gravity.y);AccGravity.y = (Acc.z * Gravity.x - Acc.x * Gravity.z);AccGravity.z = (Acc.x * Gravity.y - Acc.y * Gravity.x);GyroIntegError.x += AccGravity.x * KiDef;GyroIntegError.y += AccGravity.y * KiDef;GyroIntegError.z += AccGravity.z * KiDef;//角速度融合加速度比例补偿值,与上面三句共同形成了PI补偿,得到矫正后的角速度值Gyro.x = p_icm->gyroX * Gyro_Gr + KpDef * AccGravity.x + GyroIntegError.x; //弧度制,此处补偿的是角速度的漂移Gyro.y = p_icm->gyroY * Gyro_Gr + KpDef * AccGravity.y + GyroIntegError.y;Gyro.z = p_icm->gyroZ * Gyro_Gr + KpDef * AccGravity.z + GyroIntegError.z;// 一阶龙格库塔法, 更新四元数//矫正后的角速度值积分,得到两次姿态解算中四元数一个实部Q0,三个虚部Q1~3的值的变化q0_t = (-NumQ.q1 * Gyro.x - NumQ.q2 * Gyro.y - NumQ.q3 * Gyro.z) * HalfTime;q1_t = (NumQ.q0 * Gyro.x - NumQ.q3 * Gyro.y + NumQ.q2 * Gyro.z) * HalfTime;q2_t = (NumQ.q3 * Gyro.x + NumQ.q0 * Gyro.y - NumQ.q1 * Gyro.z) * HalfTime;q3_t = (-NumQ.q2 * Gyro.x + NumQ.q1 * Gyro.y + NumQ.q0 * Gyro.z) * HalfTime;//积分后的值累加到上次的四元数中,即新的四元数NumQ.q0 += q0_t; NumQ.q1 += q1_t;NumQ.q2 += q2_t;NumQ.q3 += q3_t;// 重新四元数归一化,得到单位向量下NormQuat = q_rsqrt(squa(NumQ.q0) + squa(NumQ.q1) + squa(NumQ.q2) + squa(NumQ.q3)); //得到四元数的模长NumQ.q0 *= NormQuat; //模长更新四元数值NumQ.q1 *= NormQuat;NumQ.q2 *= NormQuat;NumQ.q3 *= NormQuat;/* 计算姿态角 */get_angle(p_angle);
}- 在通过四元数融合角度,最后得到俯仰角和横滚角。
/* 四元素融合角度 */
static void get_angle(attitude_t *p_angle)
{vecxZ = 2 * NumQ.q0 * NumQ.q2 - 2 * NumQ.q1 * NumQ.q3; /*矩阵(3,1)项*/ //地理坐标系下的X轴的重力分量vecyZ = 2 * NumQ.q2 * NumQ.q3 + 2 * NumQ.q0 * NumQ.q1; /*矩阵(3,2)项*/ //地理坐标系下的Y轴的重力分量veczZ = NumQ.q0 * NumQ.q0 - NumQ.q1 * NumQ.q1 - NumQ.q2 * NumQ.q2 + NumQ.q3 * NumQ.q3; /*矩阵(3,3)项*/ //地理坐标系下的Z轴的重力分量p_angle->pitch = asin(vecxZ) * RtA; //俯仰角p_angle->roll = atan2f(vecyZ, veczZ) * RtA; //横滚角
}
- 把横滚角的数据转化成机器人图像的 X 坐标。这里的转化功能主要是把角度-90 到 90 度的变化范围,转成屏幕的横向尺寸大小,注意要减掉机器人图像的宽度。
/* 把翻滚角转化成图像的X坐标 */
int16_t lvgl_get_x(float a)
{int16_t temp = (int16_t)a;temp = temp * (-1);temp = temp > 0 ? (temp - 180) : (temp + 180);temp = convert_value(temp, -90, 90, 0, 320-IMG_ROBOT_WIDTH);return temp;
}
/* 映射关系转化 */
int16_t convert_value(int16_t x, int16_t in_min, int16_t in_max, int16_t out_min, int16_t out_max)
{int16_t res = (x-in_min)*(out_max-out_min)/(in_max-in_min)+out_min;if (res <= out_min) res = out_min;else if (res >= out_max) res = out_max;return res;
}
- 把俯仰角的数据转成图像的 Y 坐标。
int16_t lvgl_get_y(float a)
{int16_t temp = (int16_t)a;// temp = temp * (-1);temp = convert_value(temp, -90, 90, 0, 240-IMG_ROBOT_HIGH);return temp;
}
- 最后是根据 XY 的值来改变机器人图像的位置。
void lvgl_move_image(int16_t x, int16_t y)
{lv_obj_set_pos(image_robot, (lv_coord_t)x, (lv_coord_t)y);
}
- 编译调试,烧录运行
进入自己项目 build目录,运行以下命令编译。
cmake .. -DPROJ=watchdog -G "MinGW Makefiles"
make实验现象
烧录完成固件后,系统会弹出一个终端界面,如果没有弹出终端界面的可以打开串口助手显示调试内容。
终端会打印 ICM20607 传感器的 ID 号,如果是烧录完成后,需要手动按一下复位按键才可以正常识别到 ID
开机屏幕会先显示 1 秒图片,然后变成整个屏幕白色,并且显示一个机器人图像,等待 3 秒机器人稳定在显示器中间的时候,左右摆动开发板,机器人图像会左右移动,前后摆动开发板,机器人图像会左右上下移动。重新放回水平桌面上则机器人返回中间。

实验总结
- 从 icm20607 传感器读出的数据不能直接拿来计算角度,需要经过计算成四元数后才能计算出角度。
- 机器人图标显示的位置是以左上角为开始点,所以计算位置的时候需要把机器人图标的长宽尺寸减掉,否则在最右边的图标会显示不全。
- 烧录完固件后需要按一下复位键,并且等待传感器稳定后再操作。