基于opencv的全景图像拼接
目录
全景图拼接
算法原理
柱面坐标转换
特征匹配
全景图拼接
stitcher.h
stitcher.cpp
main.cpp
参考文献
全景图拼接
全景图拼接是利用同一场景的多张图像通过重叠部分寻找匹配关系,从而生成整个场景图像的技术。 全景图的拼接方法有很多,如按场景和运动的种类可以分为单视点全景拼接和多视点全景拼接。
对于平面场景和只通过相机旋转拍摄的场景来说,可以使用求每两幅图像之间的一个Homography变换来映射到一张图像的方法,还可以使用恢复相机的旋转的方式得到最终的全景图。当相机固定只有水平方向旋转时,也可以使用柱面或球面坐标映射的方式求得全景图。
算法原理
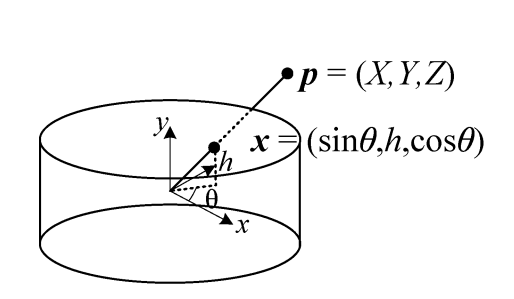
柱面坐标转换
对于每一幅图像来说,我们都可以把它们投影到一个柱面上,得到柱面上的图像 。柱面图像的坐标变换为:
x′=rtan−1(xf)x′=rtan−1(fx)
y′=ryx2+f2y′=x2+f2ry
其中(x′,y′)(x′,y′)为柱面上的坐标,(x,y)(x,y)为平面图像坐标,其坐标原点都已移至图像中心,rr 为柱面半径,ff为焦距。
然而为了得到柱面投影图像,我们往往需要将柱面图像上的点逆变换到平面图像上的对应像素点,进行插值,得到完整的柱面图像,逆变换的变换公式为:
x=ftan(x′r)x=ftan(rx′)
y=y′rx2+f2y=ry′x2+f2
特征匹配
对每两幅相邻的柱面图像进行特征提取和匹配(特征可以选用SIFT、ORB等,可以使用OpenCV的函数实现),寻找两幅相邻图像的对应关系。
全景图拼接
使用上一步得到的匹配关系,求出每两幅柱面图像的一个平移变换,利用平移变换将所有图像拼接到一起。得到一幅全景图。
stitcher.h
#pragma once
#include <opencv2/opencv.hpp>
#include <vector>class PanoramaStitcher {
public:enum FeatureType { ORB_FEATURES=0, SIFT_FEATURES=1 };explicit PanoramaStitcher(FeatureType type=SIFT_FEATURES, float match_ratio=0.75f,int min_matches=10);bool stitch(const std::vector<cv::Mat>& images, cv::Mat& result);private:struct ImageFeatures {cv::Mat image;std::vector<cv::KeyPoint> keypoints;cv::Mat descriptors;};void extractFeatures(const cv::Mat& image, ImageFeatures& features);bool matchFeatures(const ImageFeatures& f1, const ImageFeatures& f2,std::vector<cv::DMatch>& good_matches);cv::Mat findHomography(const ImageFeatures& f1,const ImageFeatures& f2,const std::vector<cv::DMatch>& matches);void blendImages(cv::Mat& panorama, const cv::Mat& new_image, const cv::Mat& H);FeatureType feature_type_;float match_ratio_;int min_matches_;cv::Ptr<cv::Feature2D> detector_;cv::Ptr<cv::DescriptorMatcher> matcher_;
};
stitcher.cpp
#include "stitcher.h"
#include <opencv2/calib3d.hpp>
#include <opencv2/imgproc.hpp>PanoramaStitcher::PanoramaStitcher(FeatureType type, float ratio, int matches): feature_type_(type), match_ratio_(ratio), min_matches_(matches) {if(type == ORB_FEATURES) {detector_ = cv::ORB::create(2000);matcher_ = cv::DescriptorMatcher::create("BruteForce-Hamming");} else {detector_ = cv::SIFT::create();matcher_ = cv::DescriptorMatcher::create("FlannBased");}
}bool PanoramaStitcher::stitch(const std::vector<cv::Mat>& images, cv::Mat& result) {if(images.empty()) return false;std::vector<ImageFeatures> features(images.size());for(size_t i = 0; i < images.size(); ++i) {extractFeatures(images[i], features[i]);}result = images[0].clone();cv::Mat accumulated_H = cv::Mat::eye(3, 3, CV_64F);for(size_t i = 1; i < features.size(); ++i) {std::vector<cv::DMatch> matches;if(!matchFeatures(features[i-1], features[i], matches)) {continue;}cv::Mat H = findHomography(features[i-1], features[i], matches);if(H.empty()) continue;accumulated_H = accumulated_H * H;blendImages(result, images[i], accumulated_H);}return !result.empty();
}void PanoramaStitcher::extractFeatures(const cv::Mat& image, ImageFeatures& features) {features.image = image;detector_->detectAndCompute(image, cv::noArray(), features.keypoints, features.descriptors);
}bool PanoramaStitcher::matchFeatures(const ImageFeatures& f1, const ImageFeatures& f2,std::vector<cv::DMatch>& good_matches) {if(f1.descriptors.empty() || f2.descriptors.empty()) return false;std::vector<std::vector<cv::DMatch>> knn_matches;matcher_->knnMatch(f1.descriptors, f2.descriptors, knn_matches, 2);for(auto &pair : knn_matches) {if(pair[0].distance < match_ratio_ * pair[1].distance) {good_matches.push_back(pair[0]);}}return good_matches.size() > min_matches_;
}cv::Mat PanoramaStitcher::findHomography(const ImageFeatures& f1,const ImageFeatures& f2,const std::vector<cv::DMatch>& matches) {std::vector<cv::Point2f> pts1, pts2;for(const auto &m : matches) {pts1.push_back(f1.keypoints[m.queryIdx].pt);pts2.push_back(f2.keypoints[m.trainIdx].pt);}return cv::findHomography(pts2, pts1, cv::RANSAC, 3.0);
}void PanoramaStitcher::blendImages(cv::Mat& panorama, const cv::Mat& new_image, const cv::Mat& H) {cv::Mat warped;cv::warpPerspective(new_image, warped, H, cv::Size(panorama.cols + new_image.cols, panorama.rows));cv::Mat mask = cv::Mat::zeros(warped.size(), CV_8U);cv::rectangle(mask, cv::Point(0,0), cv::Point(panorama.cols, panorama.rows), 255, cv::FILLED);cv::Mat blended;cv::addWeighted(panorama, 0.5, warped, 0.5, 0, blended);blended.copyTo(panorama(cv::Rect(0,0,blended.cols, blended.rows)));
}
main.cpp
#include "stitcher.h"
#include <iostream>int main() {std::vector<cv::Mat> images;for(int i = 1; i <= 10; ++i) {cv::Mat img = cv::imread("image" + std::to_string(i) + ".jpg");if(!img.empty()) images.push_back(img);}PanoramaStitcher stitcher(PanoramaStitcher::SIFT_FEATURES);cv::Mat panorama;if(stitcher.stitch(images, panorama)) {cv::imwrite("panorama_result.jpg", panorama);cv::imshow("Panorama Result", panorama);cv::waitKey(0);} else {std::cerr << "Stitching failed!" << std::endl;}return 0;
}
参考文献
Microsoft Research – Emerging Technology, Computer, and Software Research
http://faculty.cs.tamu.edu/jchai/CPSC641/szeliskiShum97.pdf