8:点云处理—常见的四种3D相机
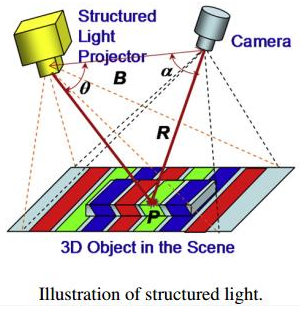
1、3D相机结构光
基本原理:
结构光技术通过投射特定图案(如条纹或点阵)到物体表面,利用摄像头捕捉形变图案,计算物体表面的三维信息。
优点:
高精度:在近距离测量中精度高,微米~毫米精度,1米范围内达毫米精度。
测量范围较大:可测量米级物体,适合测试静态物体。
主动投影:适合弱光照使用。
缺点:
环境光敏感:强光下图案容易被干扰,影响精度。
计算复杂:匹配和深度计算需要较高计算资源。
成本较高:高质量设备和算法开发成本较高。
适用场景:
适用于较大范围测量,如机器人导航、车辆避障和环境感知等
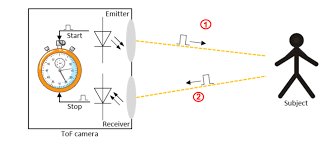
2、TOF (飞行时间)
基本原理:
通过发射脉冲光(激光或LED)到目标物体,并测量光返回的时间来计算深度信息。
优点:
测量速度快:适合实时应用。
抗环境光干扰:使用调制光,抗环境光干扰能力强。
适合远距离测量:适合大范围场景的深度测量。
缺点:
精度较低:近距离测量精度不如结构光和线激光。
分辨率较低:通常分辨率较低。
适用场景:
自动驾驶:车辆周围环境的深度感知和障碍物检测。
机器人导航:用于服务机器人、仓储机器人的避障和路径规划。
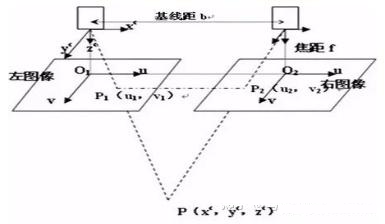
3、双目检测
基本原理:
采用两台相机从不同角度拍摄物体,模拟人眼视觉,通过对比左右图像中的像素视差(disparity),计算物体的深度信息。
优点:
无需主动光源:依赖环境光,适用于多种光照条件。
实时性:硬件和算法优化后,可实现实时深度感知。
成本较低:相比激光雷达等设备,双目摄像头成本较低。
缺点:
依赖纹理:在纹理缺乏的区域(如白墙),特征匹配困难,影响精度。
计算复杂:特征匹配和视差计算需要较高的计算资源。
基线限制:基线长度影响测量范围和精度,过短或过长都会带来问题。
环境光影响:在光照不足或过强时,图像质量下降,影响检测效果。
适用场景:
适用于动态场景,适应性强,可用于机器人视觉、自动驾驶等
4、线激光3D相机
马克拉伯的3D线激光轮廓传感器就属于这一类。
基本原理:
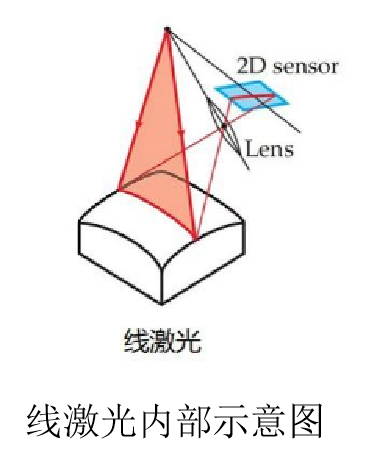
线激光3D相机是一种基于激光三角测量(Laser Triangulation)的深度测量原理。它通过投射一条激光线到物体表面,并由相机从一定角度捕捉激光线的形变情况,然后计算出物体的深度信息,通过物体或相机移动,生成完整3D点云。
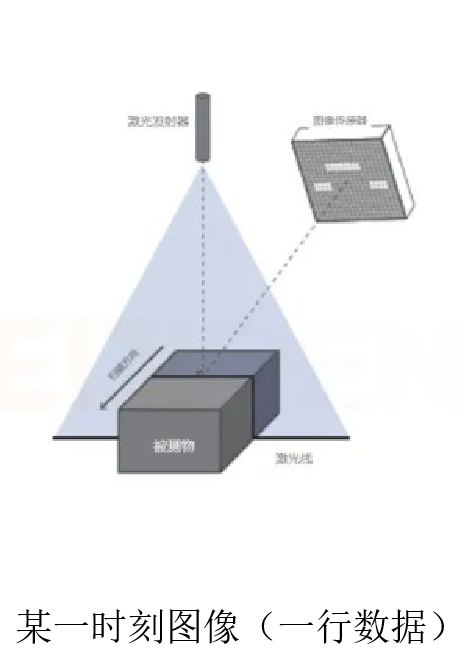
工作步骤:
线激光投射:激光器发射一条细窄的线状激光到被测物体表面,该激光线在物体表面形成一条亮的轮廓曲线。激光一般为红色或蓝色激光,波长分别为650nm、450nm、405nm,
我们目前采用405nm。特定波长激光可以减少干扰提高测量精度。
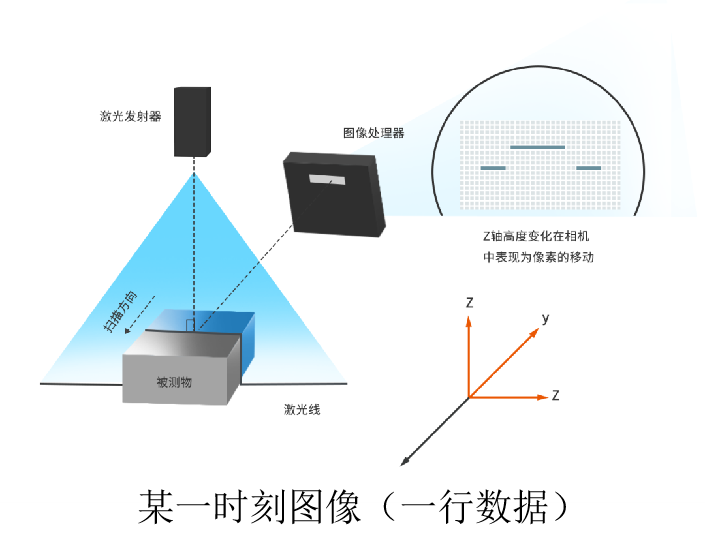
相机捕捉形变的激光线:
高速工业相机从一定角度拍摄被测物体上的激光线形变,由于物体的高度不同,激光线在相机视角下的形状也会发生变化。
深度计算:
根据激光线的形变情况,利用三角测量原理计算物体表面的深度信息。
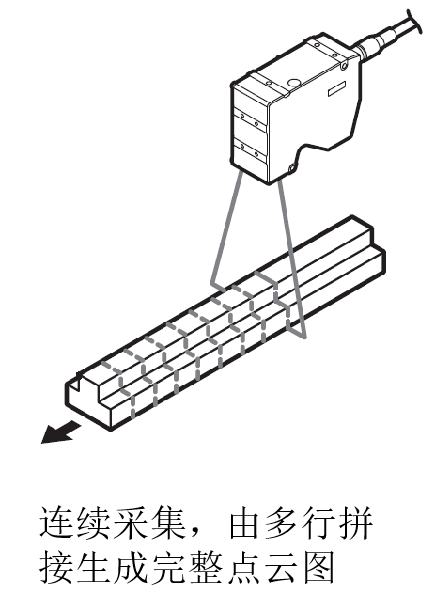
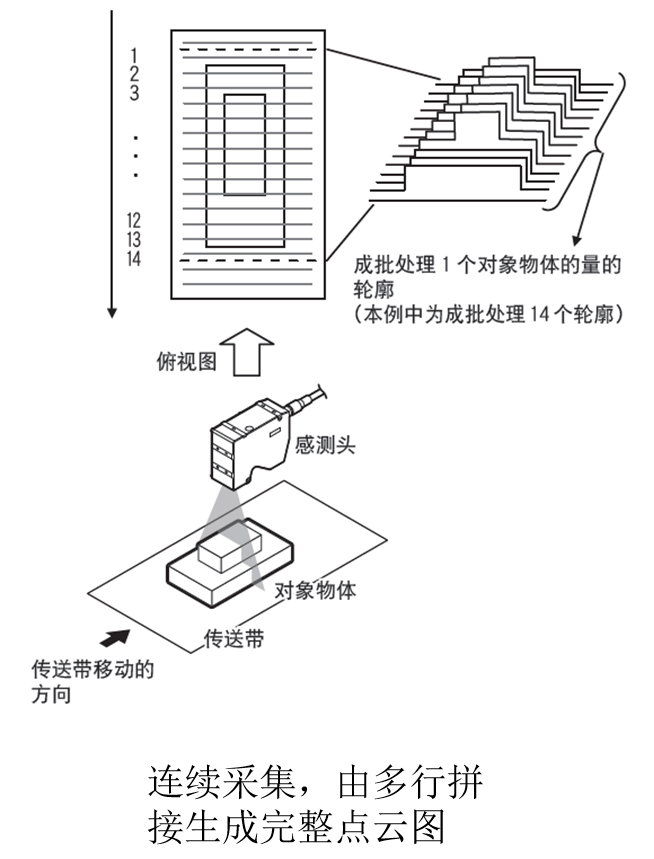
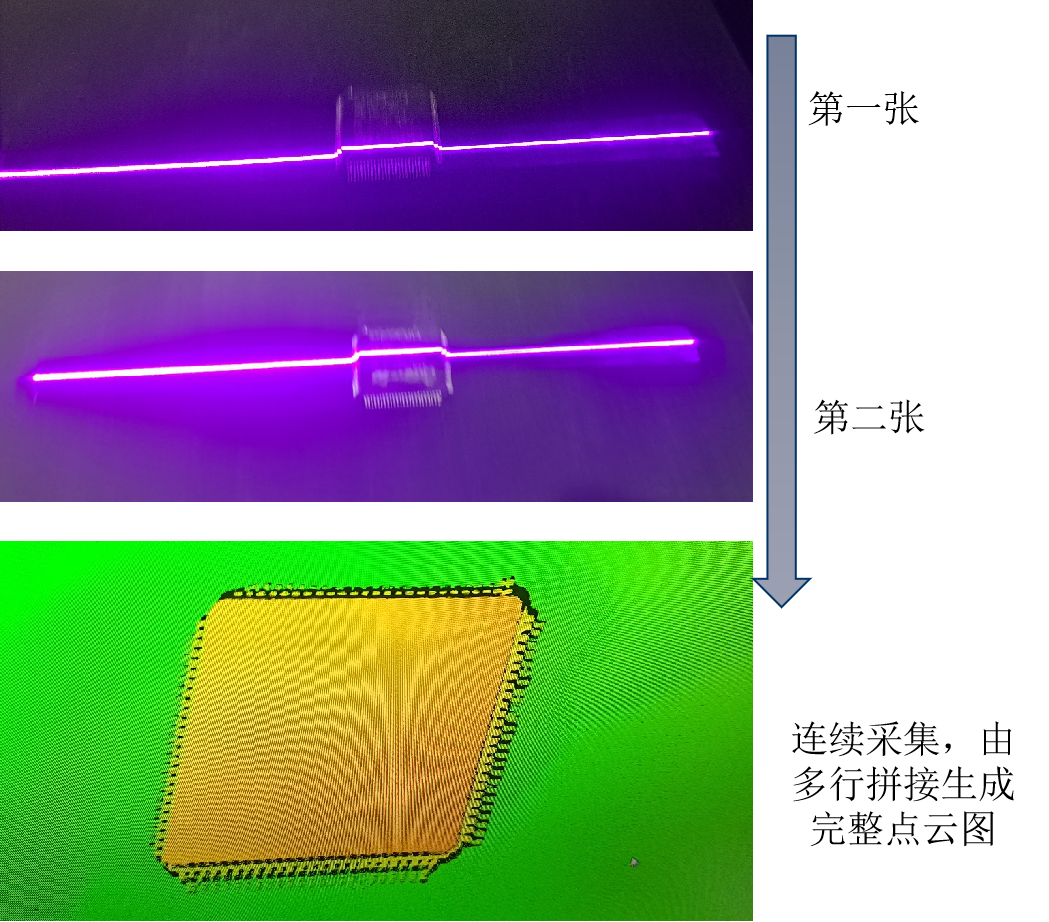
运动生成3D点云:
让物体在传送带上移动,相机连续捕捉激光线形变,从而逐行拼接出完整的3D点云数据。
优点:
高精度:在近距离测量中精度高,可达到um级别,适用于精密测量。
高分辨率:能获取高分辨率的三维信息(3200点)。
抗环境光干扰:激光亮度高,且使用特定波长激光器,抗环境光干扰能力强
缺点:
需移动扫描:需要移动激光相机或物体进行扫描,不适合大范围、全景3D建模(如房屋布局、地形地貌)。
盲区:扫描过程存在视野盲区、镜面样品检测效果不理想。
适用场景:
工业自动化检测:在线检测产品的尺寸、轮廓、形状、表面缺陷、PCB板检测、汽车零件测量、食品包装检查。
焊缝检测:扫描焊缝轮廓、深度、间隙,确保焊接质量.
机器人引导:用于机器人抓取、装配、焊接等场景,提供高精度3D视觉数据。