JR6001语音模块详解(STM32)
目录
一、介绍
二、传感器控制方式
1.按键接口
2.引脚描述
三、程序设计
main文件
usart.h文件
usart.c文件
四、实验效果
五、资料获取
项目分享
一、介绍
JR6001是一种支持串口驱动的语音模块,模块自带USB接口,能够灵活的更换SPI Flash的内容,省去了传统语音芯片需要安装上位机更换语音的麻烦, SPI Flash直接模拟成U盘,跟拷贝U盘一样,非常方便。任何电脑系统都可以支持。
以下是JR6001语音模块的参数:
| 型号 | JR6001 |
| 工作电压 | DC:3.6~5.2V |
| 额定电流 | 10mA |
| USB接口 | 2.0标准(支持任何电脑操作系统) |
| UART接口 | 标准串口,3.3TTL电平,波特率9600 |
| 工作温度 | -40~85℃ |
| 湿度 | 5%~95% |
哔哩哔哩视频链接:
JR6001语音模块(STM32)
(资料分享见文末)
二、传感器控制方式
1.按键接口
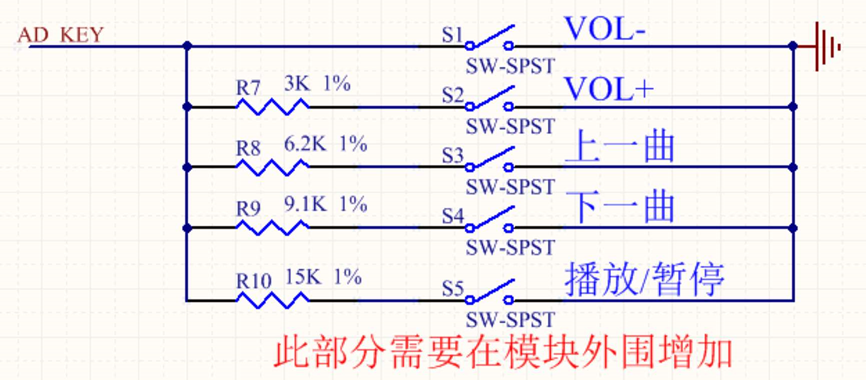
JR6001语音模块的AD_KEY引脚,是预留给外部增加控制按键使用。一共可以增加5个控制按键,功能分别是:音量减小,音量增加,上一首,下一首,播放/暂停。用到此功能,需增加电路如上图
2.引脚描述

三、程序设计
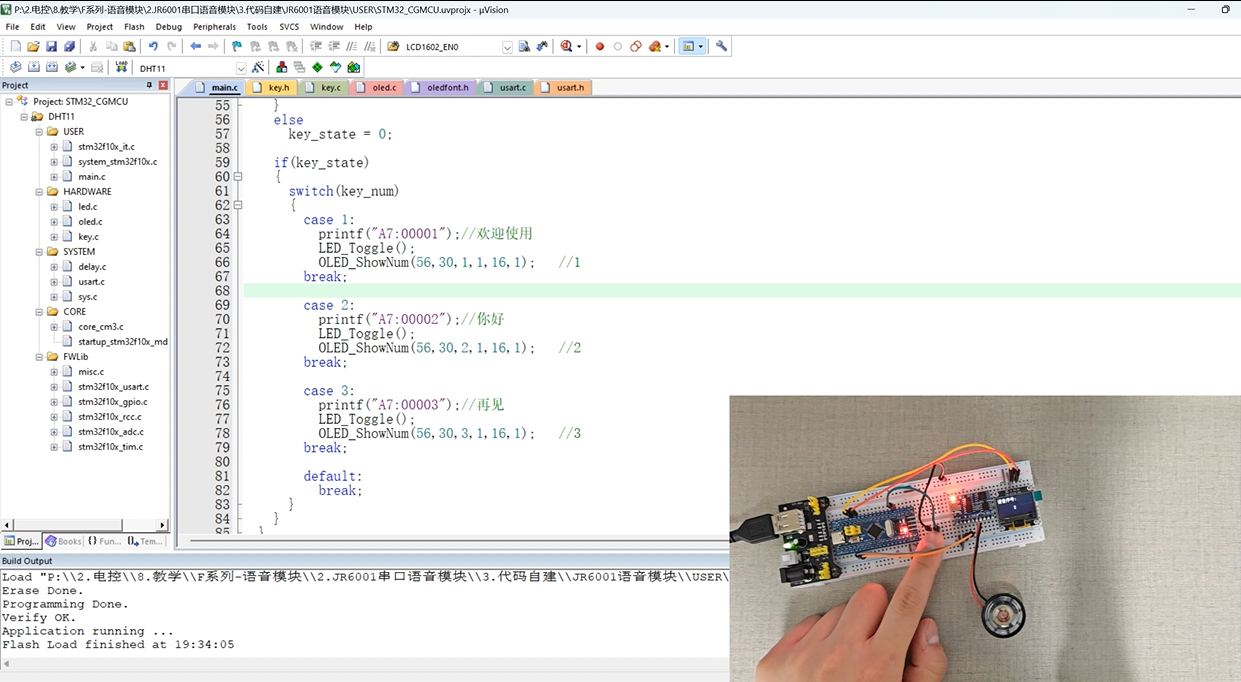
1.使用STM32F103C8T6使用JR6001语音模块连接扬声器,通过按键控制播放几段音频。
| KEY | PA0 |
| JQ6500_TX | PA10 |
| JQ6500_RX | PA9 |
| OLED_SCL | PB11 |
| OLED_SDA | PB10 |
main文件
#include "stm32f10x.h"
#include "led.h"
#include "usart.h"
#include "delay.h"
#include "oled.h"
#include "key.h"/*****************辰哥单片机设计******************STM32* 项目 : JR6001语音模块实验 * 版本 : V1.0* 日期 : 2025.2.7* MCU : STM32F103C8T6* 接口 : 参看usart.h * BILIBILI : 辰哥单片机设计* CSDN : 辰哥单片机设计* 作者 : 辰哥 **********************BEGIN***********************/int key = 0;
int key_state = 0;
int key_num = 0;int main(void)
{ SystemInit();//配置系统时钟为72M delay_init(72);LED_Init();LED_On();USART1_Config();//串口初始化Key_Init();OLED_Init();printf("AF:30");//声音调到31档 最大delay_ms(1000);OLED_Clear();//显示“语音序号:”OLED_ShowChinese(0,0,0,16,1);OLED_ShowChinese(16,0,1,16,1);OLED_ShowChinese(32,0,2,16,1);OLED_ShowChinese(48,0,3,16,1);OLED_ShowChar(64,0,':',16,1);while (1){key = Key_GetData();if(key){key_state = 1;key_num++;if(key_num>3)key_num=1;}elsekey_state = 0;if(key_state){switch(key_num){case 1:printf("A7:00001");//欢迎使用LED_Toggle();OLED_ShowNum(56,30,1,1,16,1); //1break;case 2:printf("A7:00002");//你好LED_Toggle();OLED_ShowNum(56,30,2,1,16,1); //2break;case 3:printf("A7:00003");//再见LED_Toggle();OLED_ShowNum(56,30,3,1,16,1); //3break;default:break;} }}
}usart.h文件
#ifndef __USART1_H
#define __USART1_H#include "stm32f10x.h"
#include <stdio.h>/*****************辰哥单片机设计******************STM32* 项目 : JR6001语音模块实验 * 版本 : V1.0* 日期 : 2025.2.7* MCU : STM32F103C8T6* 接口 : 参串口1 * BILIBILI : 辰哥单片机设计* CSDN : 辰哥单片机设计* 作者 : 辰哥 **********************BEGIN***********************/void USART1_Config(void);
int fputc(int ch, FILE *f);
void USART1_printf(USART_TypeDef* USARTx, uint8_t *Data,...);
void UART1SendByte(unsigned char SendData);#endif /* __USART1_H */
usart.c文件
#include "usart.h"
#include <stdarg.h>/*****************辰哥单片机设计******************STM32* 项目 : JR6001语音模块实验 * 版本 : V1.0* 日期 : 2025.2.7* MCU : STM32F103C8T6* 接口 : 参串口1 * BILIBILI : 辰哥单片机设计* CSDN : 辰哥单片机设计* 作者 : 辰哥 **********************BEGIN***********************/void USART1_Config(void)
{GPIO_InitTypeDef GPIO_InitStructure;USART_InitTypeDef USART_InitStructure;/* 使能 USART1 时钟*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA, ENABLE); /* USART1 使用IO端口配置 */ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化GPIOA/* USART1 工作模式配置 */USART_InitStructure.USART_BaudRate = 9600; //波特率设置:9600USART_InitStructure.USART_WordLength = USART_WordLength_8b; //数据位数设置:8位USART_InitStructure.USART_StopBits = USART_StopBits_1; //停止位设置:1位USART_InitStructure.USART_Parity = USART_Parity_No ; //是否奇偶校验:无USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //硬件流控制模式设置:没有使能USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;//接收与发送都使能USART_Init(USART1, &USART_InitStructure); //初始化USART1USART_Cmd(USART1, ENABLE);// USART1使能
}/* 描述 :重定向c库函数printf到USART1*/
int fputc(int ch, FILE *f)
{
/* 将Printf内容发往串口 */USART_SendData(USART1, (unsigned char) ch);while (!(USART1->SR & USART_FLAG_TXE));return (ch);
}/*发送一个字节数据*/
void UART1SendByte(unsigned char SendData)
{ USART_SendData(USART1,SendData);while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
} 四、实验效果