5. 配置舵机ID(具身智能机器人套件)
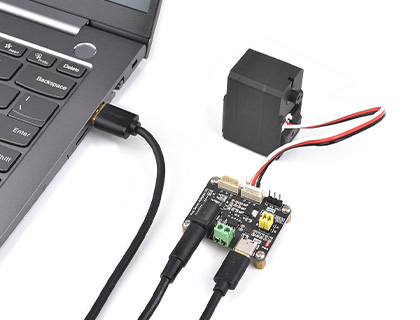
1. 连接舵机
- waveshare驱动器板使用9-12v供电
- Type-C连接电脑
- DVG连接一个舵机
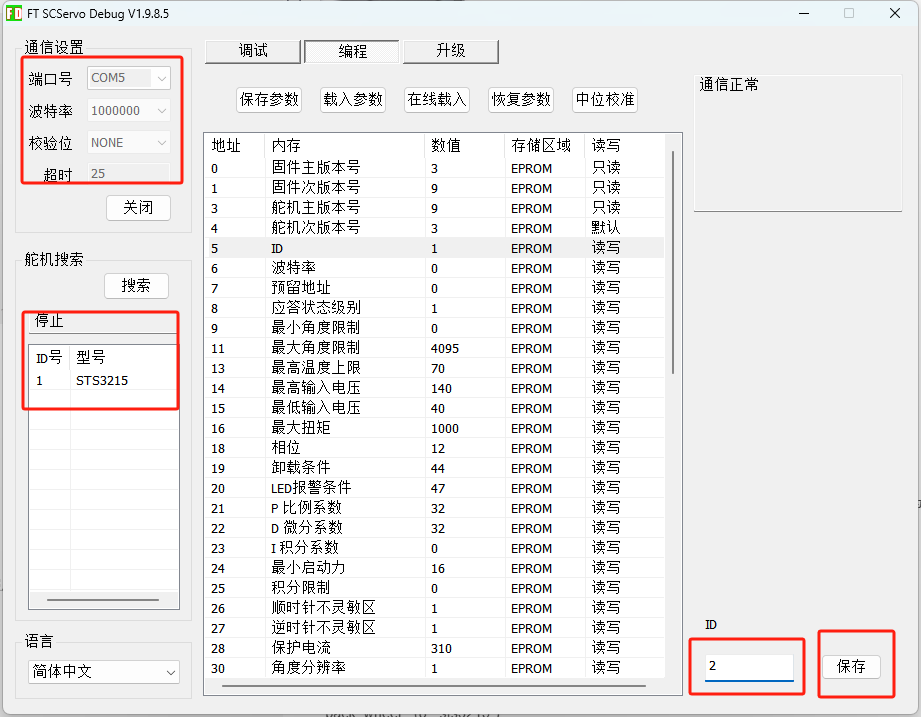
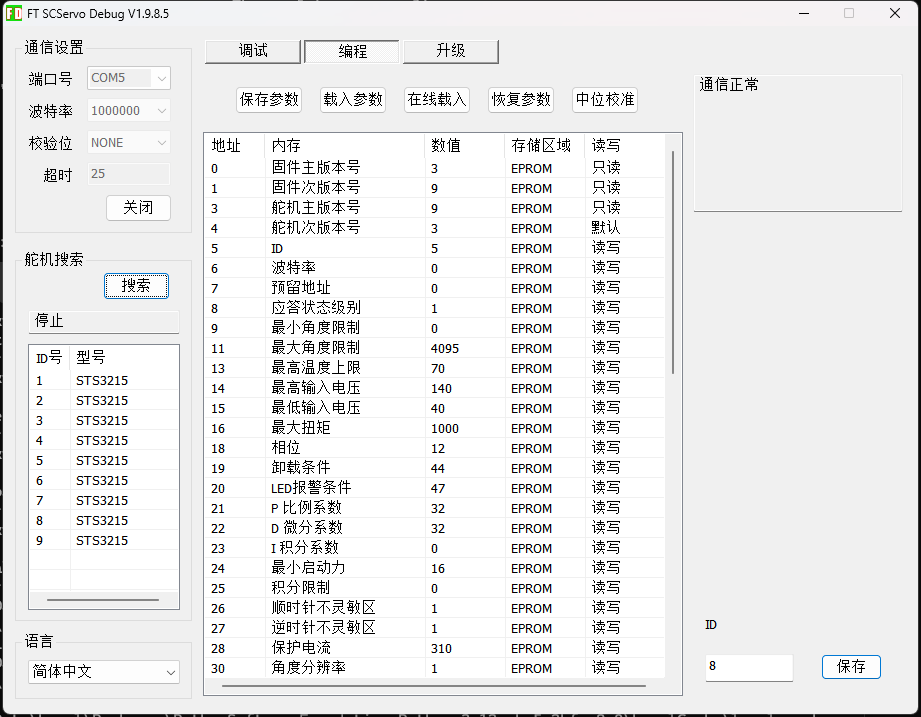
2. 使用FT SCServo Debug软件
- 设置串口
- 设置波特率(默认1000000,100万)
- 打开串口
- 编程界面
- 修改ID
3. 依次修改所有舵机ID
分别使用waveshare驱动板连接舵机,在飞特调试软件中修改舵机ID,按照从下往上顺序修改为1-6,最终会在配置文件中,使用这个ID,对应配置文件如下:
机械臂(主臂、从臂一致)
1:shoulder_pan
2:shoulder_lift
3:elbow_flex
4:wrist_flex
5:wrist_roll
6:gripper
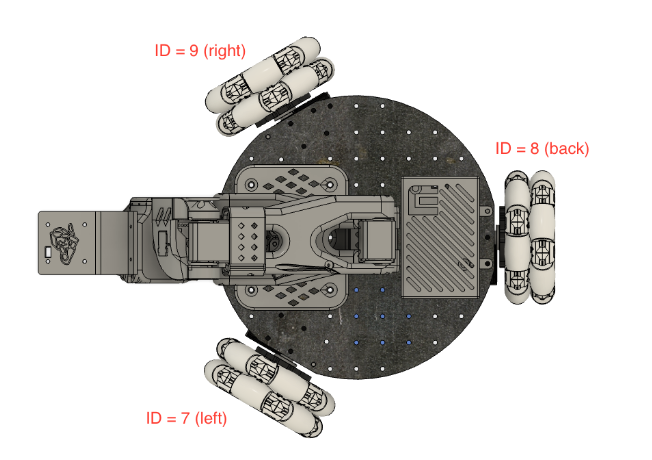
底盘(机械臂为参考点的顶视图)
7:left_wheel
8:back_wheel
9:right_wheel
4. 串联整个臂
配置好单个舵机后,串联全部臂后,通过调试软件查看,如下
主机械臂:
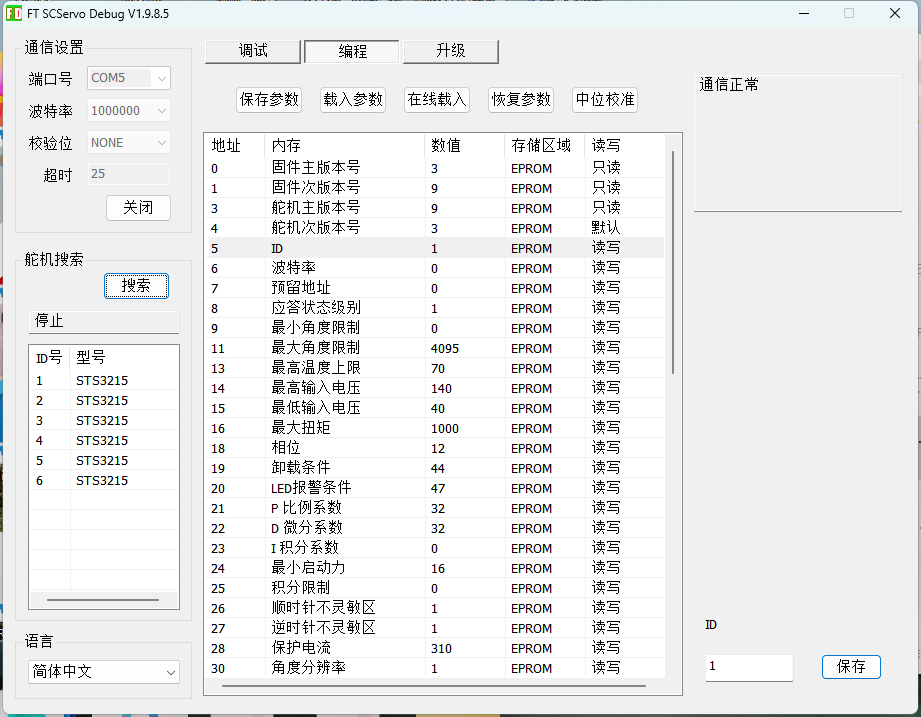
车载机械臂
注意:不配置会ID冲突
有时候不返回数据包,有时候返回错误的数据包,因为ID冲突,参考:[TxRxResult] There is no status packet! 及 Incorrect status packet! 问题修复
具身开源套件部分课程如下,欢迎联系合作采购(全套开源)
- 树莓派上配置机器人环境
- 电脑主机上配置机器人环境
- 机器人硬件组装
- 基于硬件更新软件配置
- 配置舵机ID
- 机器人标定
- 机器人远程遥控
- 机器人数据集记录
- 机器人模型训练与评估