ROS教育中自动驾驶机器人的技术融合与技术创新
在智能教育蓬勃发展的当下,自动驾驶机器人已成为高校和科研院所开展机器人学、人工智能等领域教学与研究的核心载体。深圳普蓝机器人推出的自动驾驶机器人,以 ROS 系统为基础架构,深度融合 AI 框架,凭借强大的技术性能与开放的二次开发能力,为高校师生和科研人员提供了高效的创新平台,在智能教育及多场景应用中展现出卓越的技术实力。
技术架构革新:ROS 与 AI 框架的深度融合
普蓝自动驾驶机器人的核心竞争力源于其先进的技术架构。该机器人以ROS(机器人操作系统) 为基础,这一被全球学术界广泛认可的开源系统,为机器人的模块化开发提供了标准化接口,使学生和科研人员能够快速调用导航、感知、控制等核心功能模块,降低了底层开发的技术门槛。
在此基础上,机器人创新性地集成了AI 框架,实现了 ROS 系统与深度学习、强化学习等 AI 技术的无缝衔接。例如,在机器视觉任务中,AI 框架可直接调用 ROS 系统采集的激光雷达、摄像头等传感器数据,通过预训练模型快速实现目标检测、语义分割等功能;而在自主决策环节,强化学习算法能基于 ROS 反馈的环境状态,实时优化机器人的运动策略。这种融合架构不仅保留了 ROS 的开放性和兼容性,更赋予机器人强大的智能处理能力,显著提升了二次开发的效率。
二次开发优势:为创新研究保驾护航
普蓝自动驾驶机器人在二次开发方面的技术优势,使其成为高校和科研院所的理想选择。
高性能机器人控制器是机器人的 “大脑”,搭载多核处理器和专用 AI 加速单元,能够同时处理 ROS 节点通信、传感器数据融合、AI 模型推理等复杂任务,确保在多任务并发场景下的实时性和稳定性。例如,在自动驾驶算法测试中,控制器可同步处理激光 SLAM 建图、路径规划和车辆控制指令,为算法验证提供可靠的硬件支撑。
机器人支持SDK(软件开发工具包) 和ROS 开发与仿真,为二次开发提供了全方位的技术支持。SDK 包含丰富的 API 接口和开发文档,覆盖从底层电机控制到上层应用开发的全流程,使开发者能够根据需求自定义功能模块;而 ROS 开发与仿真环境则允许在虚拟场景中进行算法调试和功能验证,减少了实体机器人的损耗,缩短了开发周期。例如,学生在开发自主避障算法时,可先在仿真环境中测试不同传感器配置下的避障效果,再将成熟的算法部署到实体机器人上。
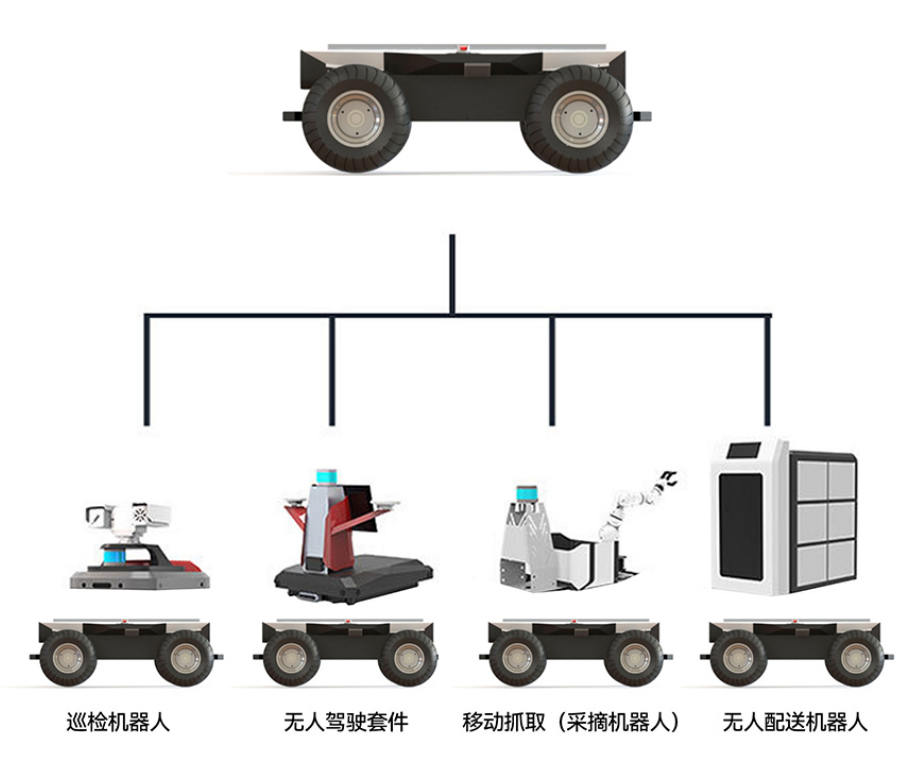
100kg 的有效负载能力为二次开发提供了充足的扩展空间。科研人员可根据研究需求,灵活搭载机械臂、多光谱相机、毫米波雷达等外设,拓展机器人的应用场景。无论是农业采摘研究中的果实抓取机械臂,还是能源巡检中的设备检测传感器,机器人都能稳定承载并协同工作,满足多样化的科研需求。
多场景应用:技术实力的全面展现
凭借强大的技术架构和二次开发能力,普蓝自动驾驶机器人在多个领域的教学与研究中发挥着重要作用。
在教育科学领域,机器人成为 ROS 和 AI 教育的实践平台。学生通过搭建简单的避障、循迹算法,逐步掌握 ROS 节点通信、坐标变换等核心概念;而进阶学习者可利用 AI 框架开发更复杂的任务,如基于视觉的自主泊车,在实践中深化对智能控制理论的理解。
科学研究方面,机器人为前沿课题提供了实验载体。例如,在自动驾驶算法研究中,科研人员可基于该平台测试端到端的驾驶控制模型;在大模型与机器人融合领域,可探索大语言模型生成的任务指令如何通过 ROS 系统转化为机器人的具体动作,推动智能体技术的发展。
在工程勘察、能源巡检、农业采摘、仓储配送等场景的研究中,机器人的技术优势同样显著。其稳定的控制性能和扩展能力,能够模拟真实场景中的机器人工作状态,为相关领域的技术创新提供可靠的实验数据。