77.数据大小端赋值的差异与联系
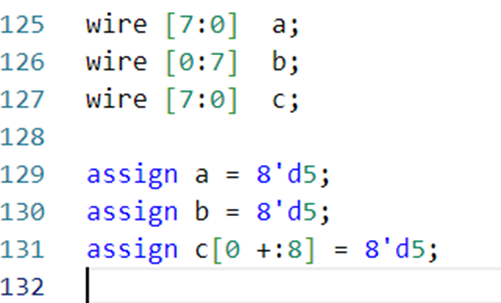
上述赋值a定义为大端模式
a[7] a[6] a[5] a[4] a[3] a[2] a[1] a[0]
上述赋值b定义为小端模式
a[0] a[1] a[2] a[3] a[4] a[5] a[6] a[7]
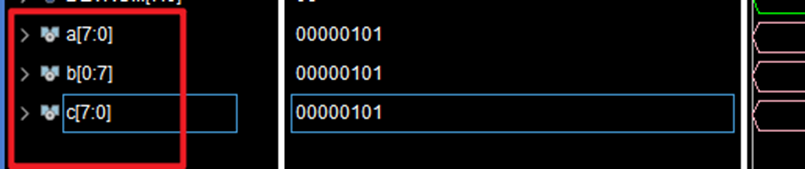
因为5的二进制数值是固定的0101因此存储起来数值看起来是一样的,但定义的物理位序是不同的,存储数据没影响,但如果参与运算时要特别注意差异。
C直接被解释为大端模式。
上述赋值a定义为大端模式
a[7] a[6] a[5] a[4] a[3] a[2] a[1] a[0]
上述赋值b定义为小端模式
a[0] a[1] a[2] a[3] a[4] a[5] a[6] a[7]
因为5的二进制数值是固定的0101因此存储起来数值看起来是一样的,但定义的物理位序是不同的,存储数据没影响,但如果参与运算时要特别注意差异。
C直接被解释为大端模式。