计算机图形学基础--Games101笔记(一)数学基础与光栅化
数学基础
向量
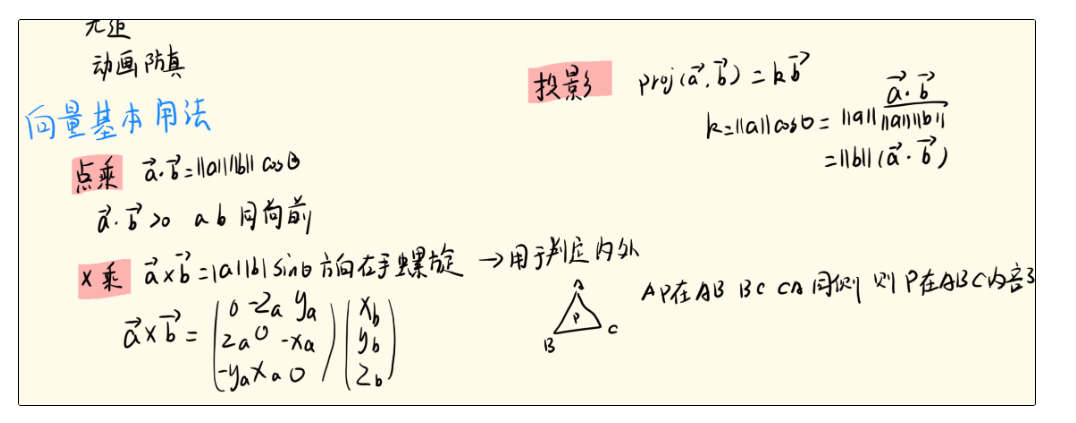
点乘,叉乘和投影:
插值
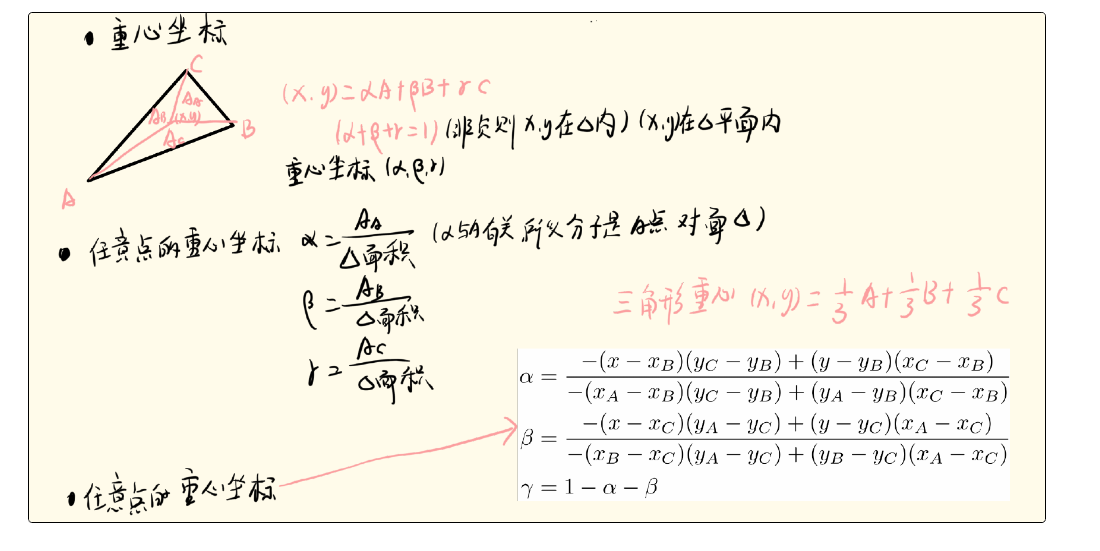
三角形插值
**重心坐标:**我们通过任意点的重心坐标来插值。 V = α V A + β V B + γ V C V=\alpha V_A+\beta V_B+\gamma V_C V=αVA+βVB+γVC。注意重心坐标没有投影不变性,如果插值三维属性,需要利用投影前的坐标插值。例如深度插值应该用三维空间坐标。
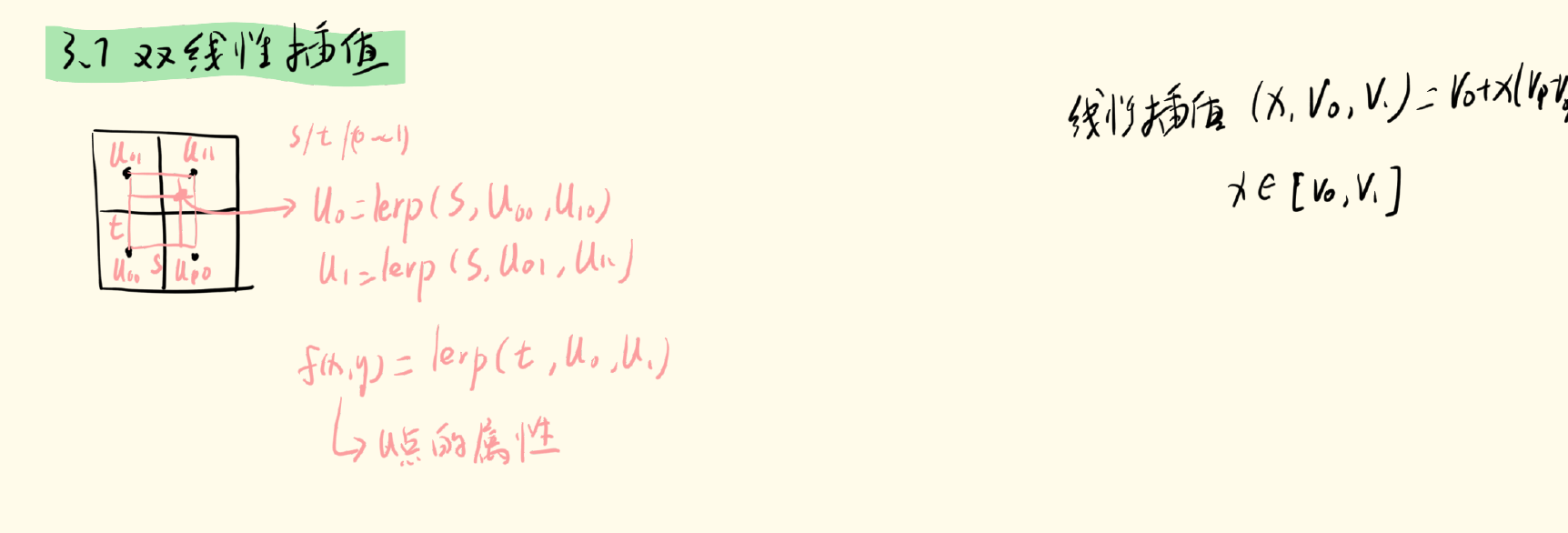
双线性插值
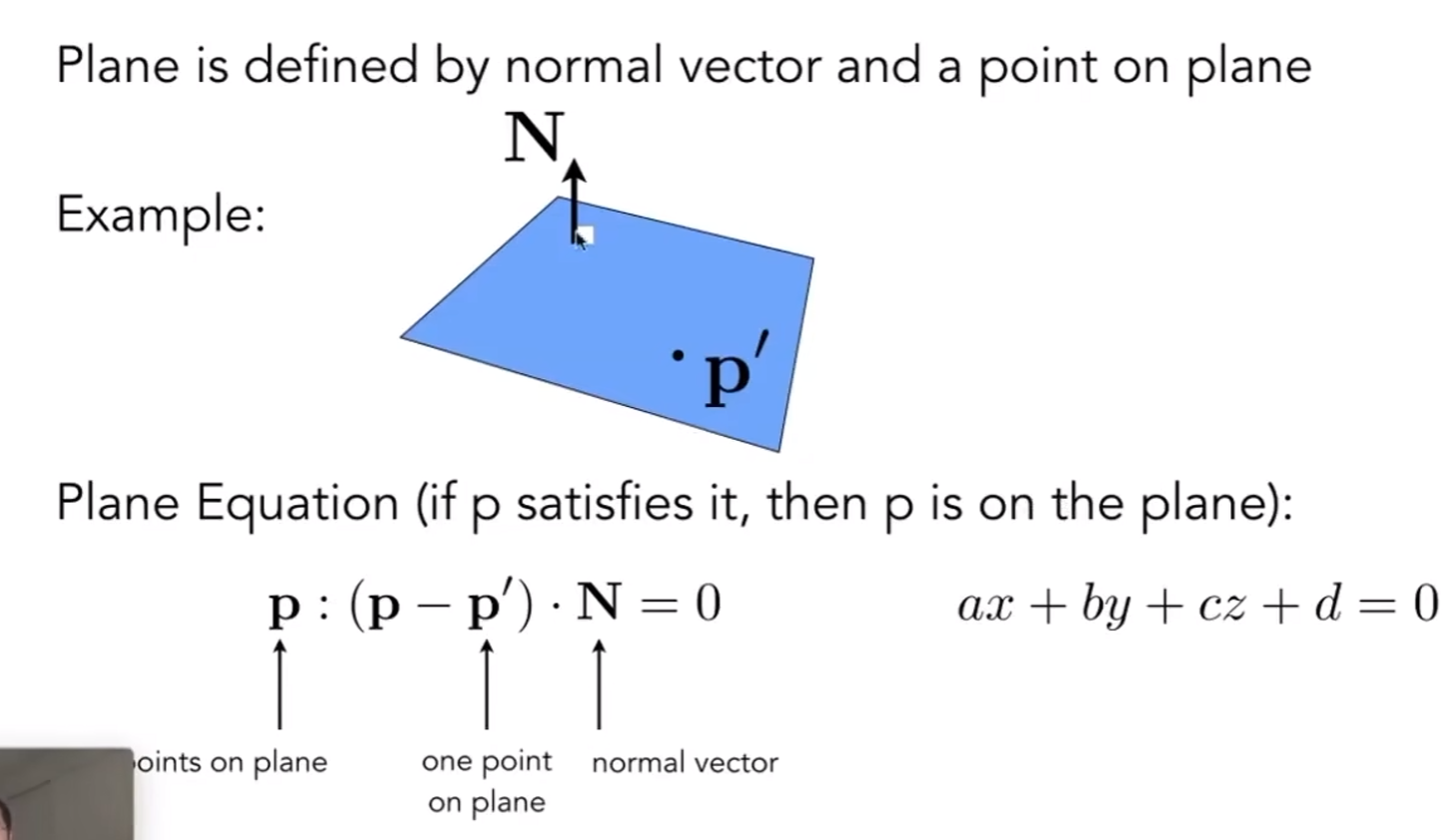
平面定义
法线-点表示
第一部分:光栅化
坐标变换
二维变换
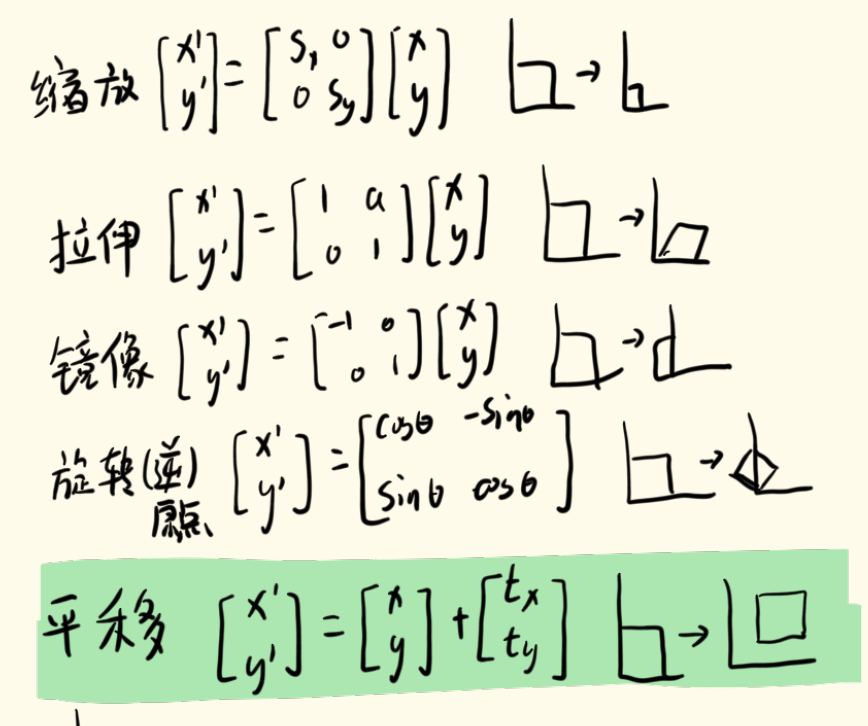
从上述公式中我们发现,平移变换需要两个向量的加和,为了使得所有的变换统一写成矩阵乘法的形式,我们引入齐次坐标。在齐次坐标中,每个点表示为: ( x , y , 1 ) T (x,y,1)^\mathrm{T} (x,y,1)T,每个向量表示为: ( x , y , 0 ) T (x,y,0)^\mathrm{T} (x,y,0)T。通过这种方式我们可以确保,点加点等于点(中点),点减点等于向量,向量加减向量还是向量。点加减向量还是向量。特别地,我们认为 ( x , y , k ) T = ( x / k , y / k , 1 ) T (x,y,k)^\mathrm{T}=(x/k,y/k,1)^\mathrm{T} (x,y,k)T=(x/k,y/k,1)T。在引入齐次坐标后,平移可以写成:
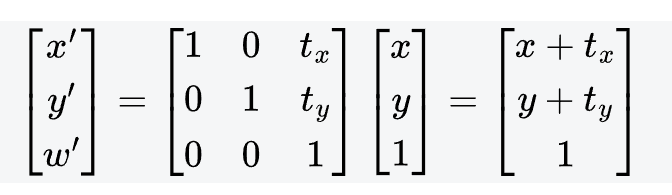
在其次坐标系下的变化矩阵最后一行一般都是001,左上角是缩放,拉伸,镜像,旋转变化,最后一列是平移变换。在这种情况下,是先进性二维变换,在进行平移变换。
如果要求逆变换,求矩阵的逆即可。由于矩阵乘积不满足交换律,因此计算的时候不可更改变换矩阵的顺序。注意旋转矩阵是正交矩阵,求旋转矩阵的逆相当于求旋转矩阵的转置。
3D变换
在三位空间中点和向量的描述形式和二维空间类似(只增加了一个z维)。三位空间中的旋转和二位空间有些许不同。我们按照xyz的顺序构建坐标系,沿x轴旋转的时候yxz是x轴,沿y轴旋转的时候xz是-y轴。因此需要添加符号(conx=-conx)
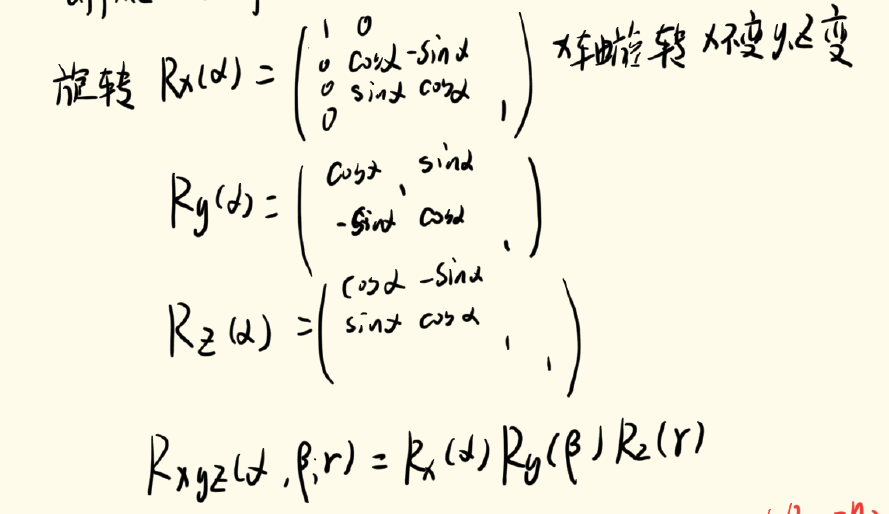
我们可以通过分解的方式,吧沿任意轴旋转a度分解为沿xyz轴分别旋转a1,b1,c1度。也可以通过三位旋转矩阵直接求沿着任意轴旋转。 R ( n , α ) R(n,\alpha) R(n,α)是沿着空间中任意一个轴n逆时针旋转 α \alpha α度后的结果。

视图变换(MVP)

投影变换
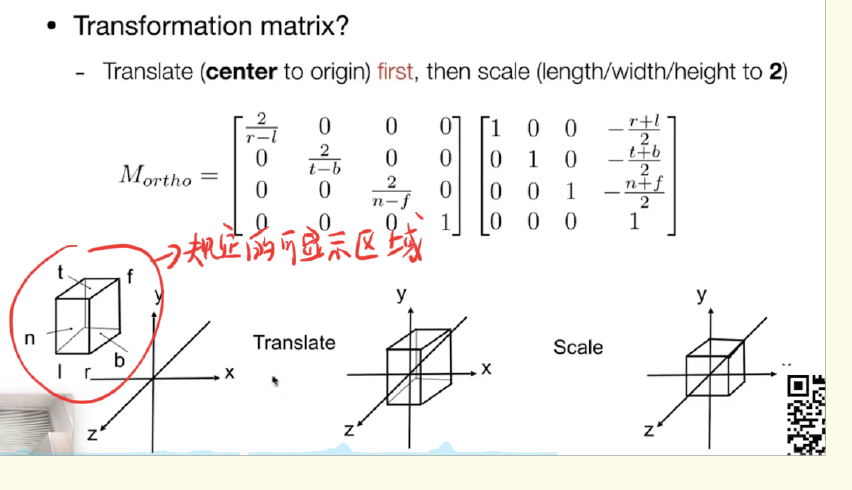
投影变换分为两种:正交投影和透视投影。正交投影我们先做平移,再做缩放。我们把物体的中心移动到坐标轴远点,之后把物体限制在(-1,1)的立方体中。
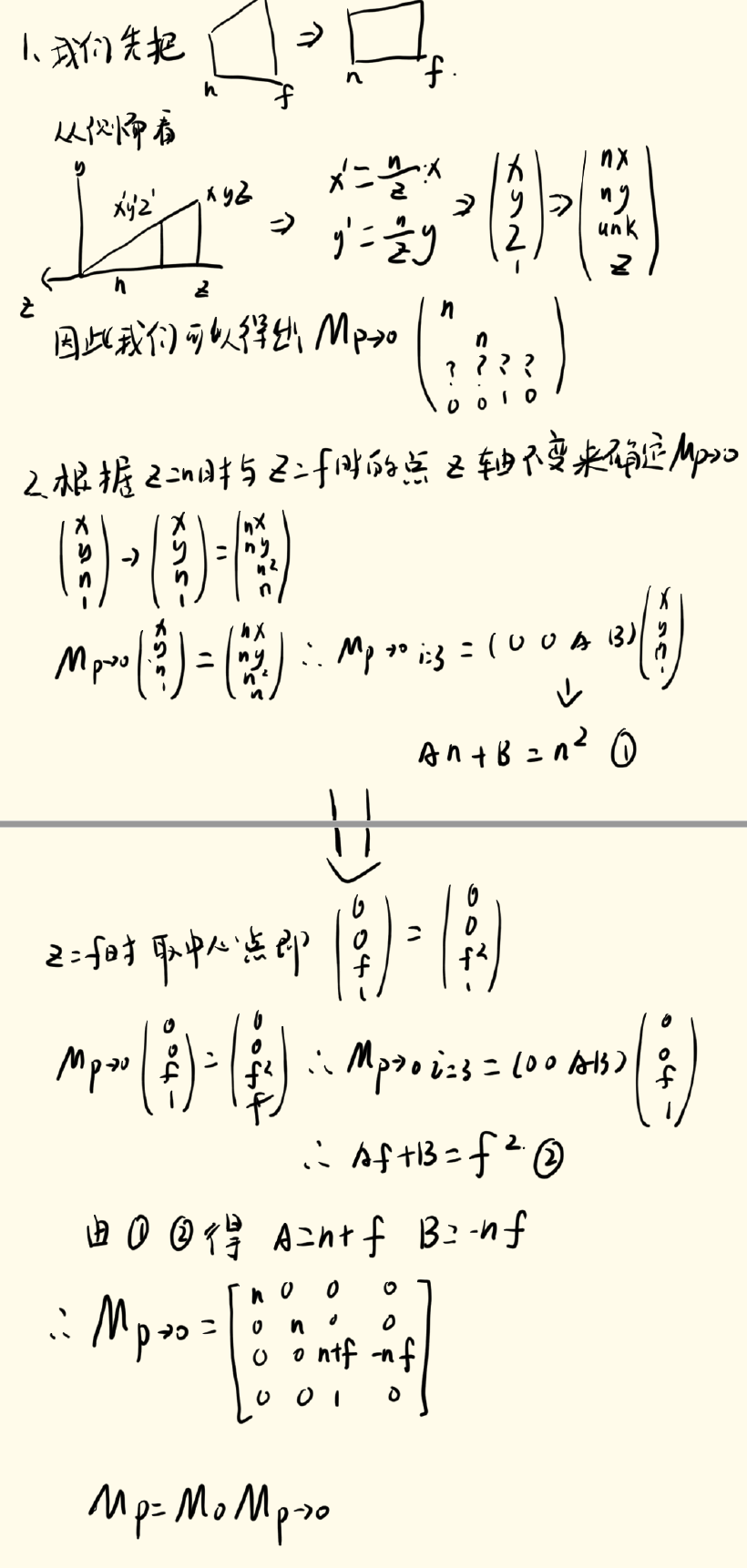
**透视投影:**我们先把透视投影变换为正交投影所需的长方体,再进行正交投影。再压缩透视投影的梯形体时,对于前面的面上的点,z值不变,后面面上的点同理。
光栅化
采样
我们先忽略z轴,考虑-1,1的正方体。采样就是判断像素点是否在三角形内。我们可以对整个屏幕范围采样,也可以采用bounding采样,还有行bounding采样。
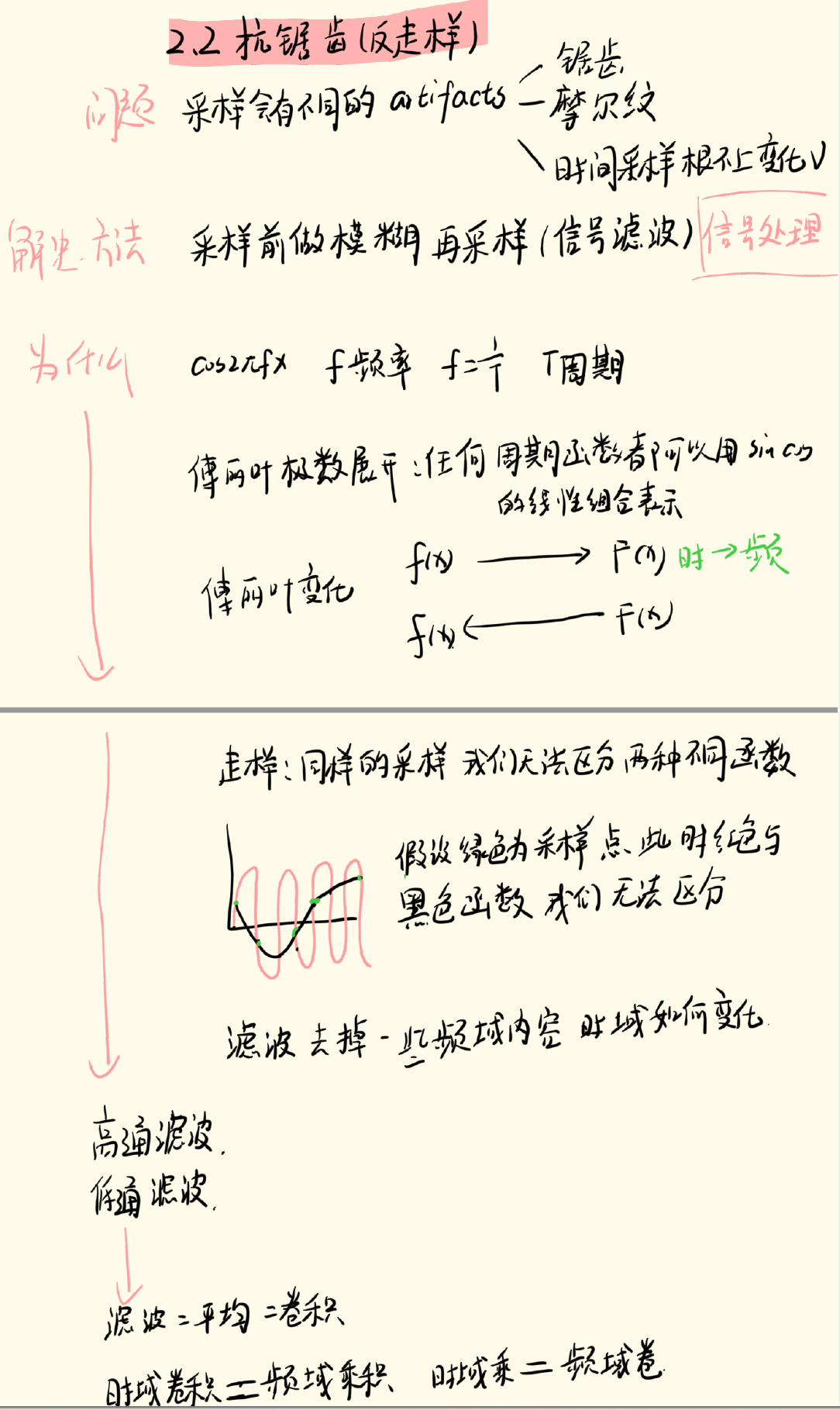
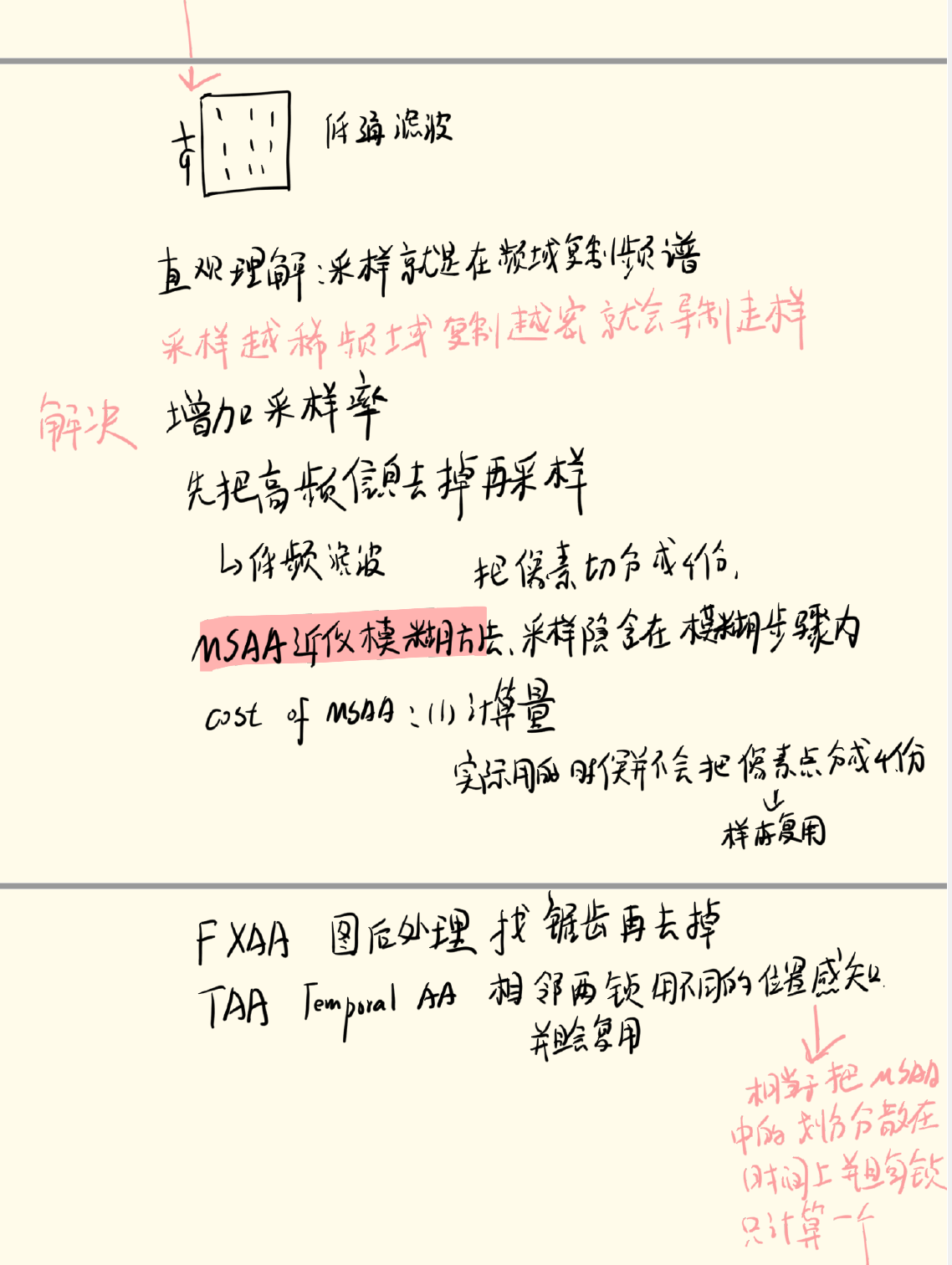
抗锯齿(反走样)
可见性(遮挡)
如何在采样的时候维持正确的模型顺序?–深度缓冲方法。该方法无法处理透明物体。如果两个三角形在同一个像素内有相同的深度如何处理?(工程实现问题)
外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传
着色与纹理
着色器可以做任何事情!!!
在本章节,我们只考虑着色点本身,不考虑其他点(比如遮挡)。每个着色点可以是一个像素,也可以是一个fragment,这取决于我们如何采样。I表示入色光的单位光强,V代表反色方向,n是法线。ivn都是单位向量。
外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传
Blinn-Phong着色模型
该模型是一个经验模型。在该模型中,我们考虑漫反射,镜面反色和环境光。
漫反射diffuse: L d = k d ( I / r 2 ) m a x ( 0 , n I ) L_d=k_d(I/r^2)max(0,nI) Ld=kd(I/r2)max(0,nI)。其中kd为漫反射系数(物体颜色),nI是光线和着色点的cos值。
镜面反射specular: L s = k s ( L / r 2 ) m a x ( 0 , n h ) p , , , h = ( v + I ) / ∣ ∣ V + I ∣ ∣ L_s=k_s(L/r^2)max(0,nh)^p,,,h=(v+I)/||V+I|| Ls=ks(L/r2)max(0,nh)p,,,h=(v+I)/∣∣V+I∣∣,H代表入i和v的半程向量,如果该半程向量与n很近,则代表人眼看到的高光越明显(为什么算半程向量,而不是算光的反色向量和人眼向量的sin,是因为半程向量计算简单)ks一般为白色。
环境光ambient: L a = K a I a L_a=K_aI_a La=KaIa,该模型是一个经验模型,环境光当作一个常熟项简单处理。
最终着色: L d + L s + L a L_d+L_s+L_a Ld+Ls+La
着色频率
- 三角形着色,三角形法线可以用叉乘计算
- 顶点着色,顶点法线可以用该顶点相关的三角形的法线的加权平均值。此外也可以用该顶点实际表示的图形来确定法线,例如如果用三角形组合表示圆,则顶点的法线防线可能是圆心到该顶点的连线方向。
- 像素着色(fragemt),算出三角形的所有顶点法线,用插值方法得到像素法线。phong shadings
渲染管线
外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传
纹理
物体不同位置可能有不同的属性(着色时用特有的属性而不用同一的属性),该属性定义在物体表面上。我们把这个属性用一张图(纹理图)来表示,同时给出模型上每一个点对应纹理图上的点(纹理映射,纹理坐标一般定义在三角形的顶点上)。
**纹理太小:**映射道德如果是纹理中的非整数坐标,我们可以采用该顶点周围的四个点进行双线性插值,用差值,返回插值后的属性。
**纹理太大:**纹理太大时会导致采样频率不足,从而产生走样。不同像素覆盖纹理的区域不同,有些点可能实际覆盖了很大一部分纹理区域,只返回该点的属性必然会导致走样问题。可以通过范围查询方法MipMap来缓解。范围查询返回一定范围内的平均值,MipMap是一种近似方法,fast,approx,square。该方法在远距离下会导致过度模糊。
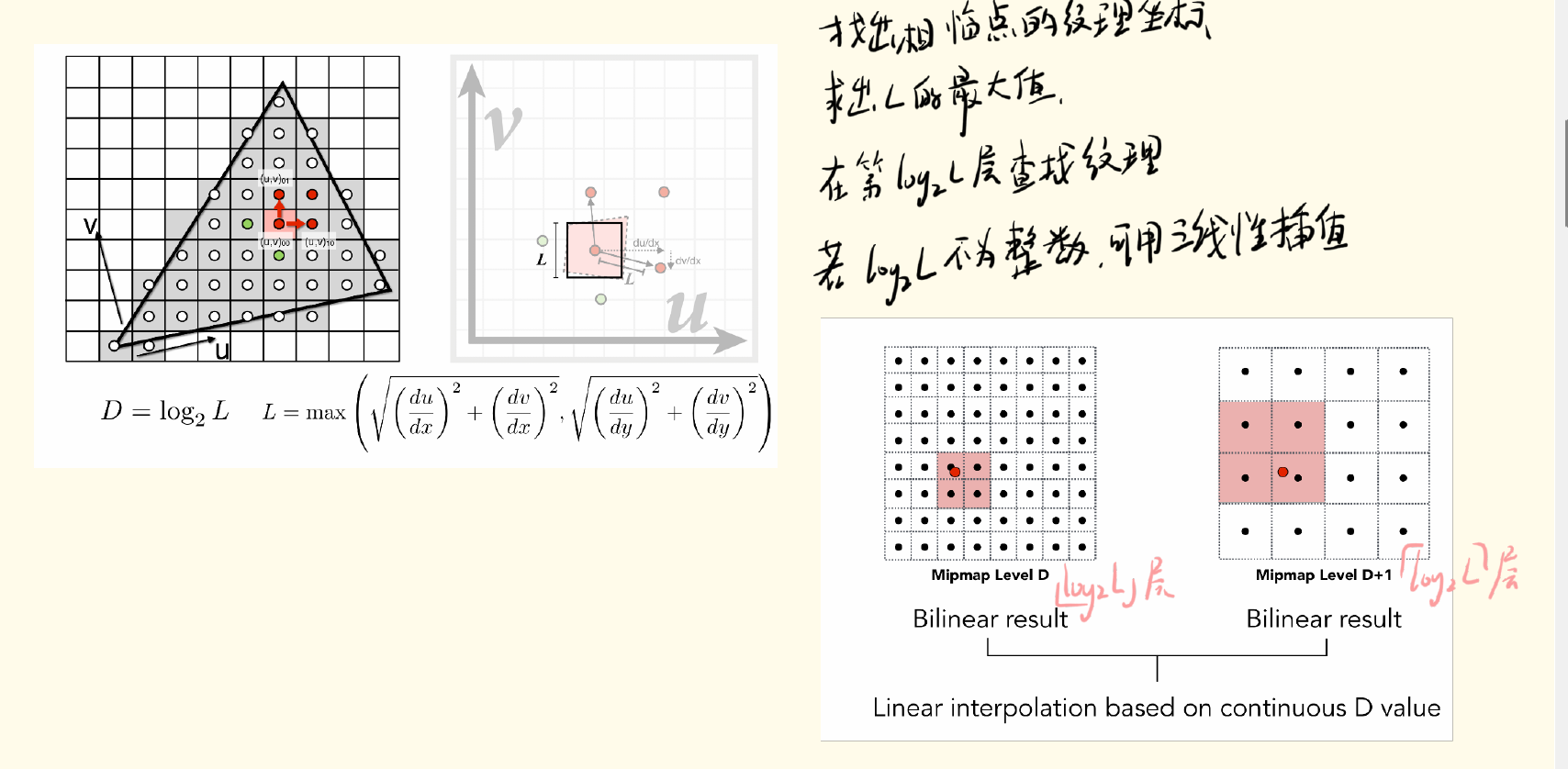
MipMpa方法
该方法会提前计算4和1,8和1,,,,点的平均值,并保存 l o g 2 h log_2h log2h个纹理图。其中h是正方形纹理的长度。
在进行纹理映射时,我们首先确定每个点所覆盖的纹理范围。我们通过该点周围的四个点的坐标来把纹理覆盖范围近似成正方形。通过纹理覆盖范围的边长查找相应层级的纹理图。如果log2L不为整数,我们可以在两层纹理图中采用三线性插值的方式得到最终属性。
MipMap方法无法解决该点所覆盖的纹理是矩形(尤其是长条矩形)情况下的的走样问题。一种缓解方法是各向异性过滤。该方维护不同长宽比例下的纹理分层图。
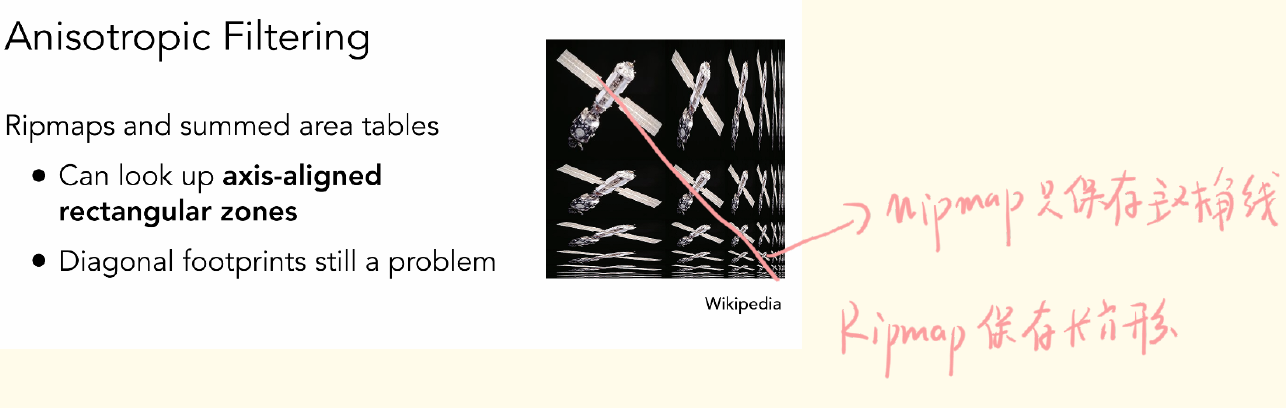
如果要缓解倾斜矩形,可以采用EWA filtering方法,但是该方法计算量大。
纹理作用
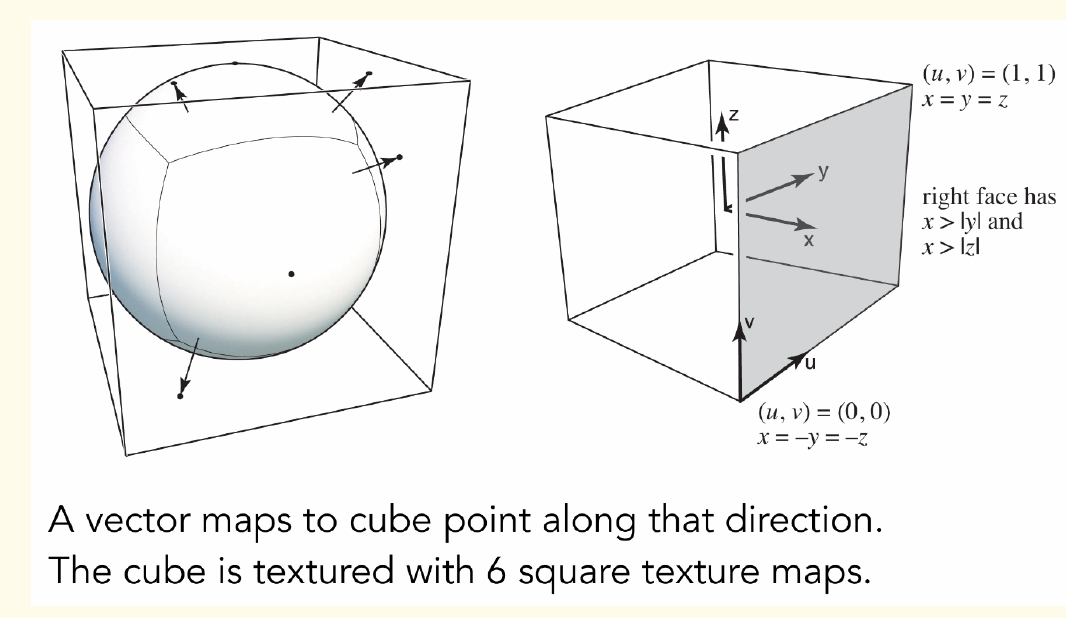
**环境光纹理:**纹理可认为是gpu中的一块数据,可以做点查询和范围查询。因此我们可以把环境光做成纹理,渲染过程中通过纹理映射仿照环境光。我们可以用一个光滑的球体来记录环境光,把球展开贴到环境中的物体表面。用球有个缺点是极点初会被压缩。为了解决这个问题,我们可以用一个正方体包围一个球体。把球体上的每一个点都沿着法线方向打到立方体表面。
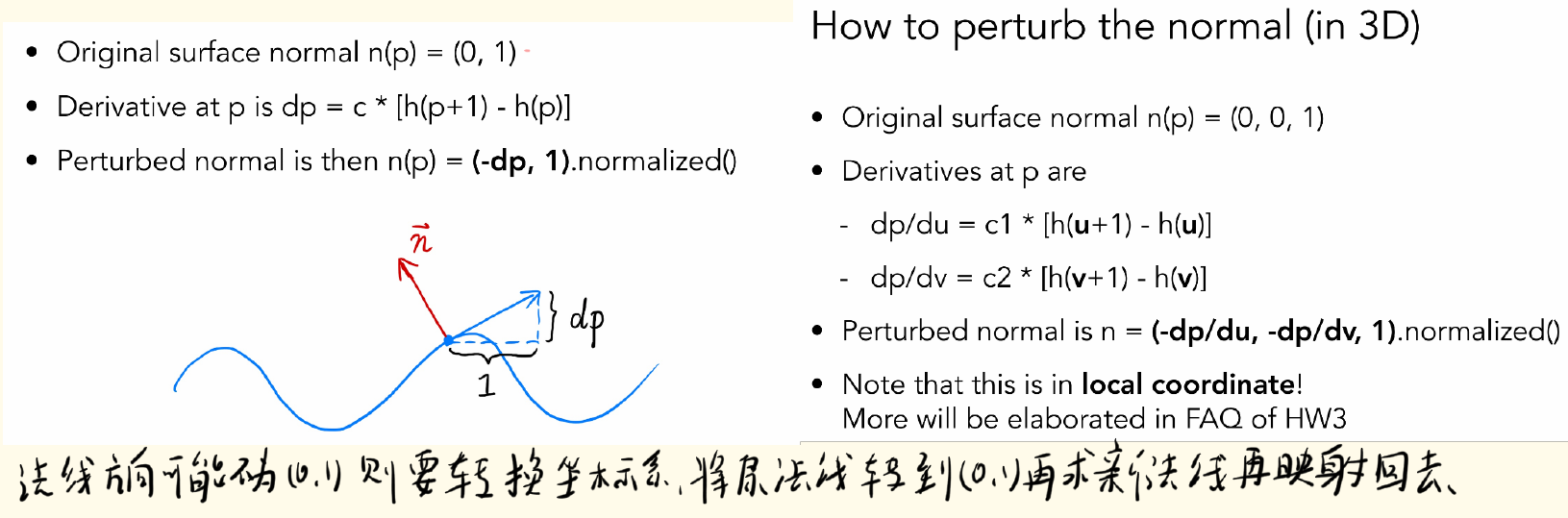
**凹凸贴图:**凹凸贴图定义了每个点的相对移动距离,从而改变着色点的法线,渲染出一种凹凸的质感。实际上该点并不会凹凸。我们假设原始表面是水平,并且法线向上。在二维情况下更改后的法线如下图左图。我们通过推广,可以得到三位空间下更改后的法线,下图右图。(纹理保存的是高度变化信息h)。注意在三位空间中,法线方向不一定为001,此时我们需要转换坐标系,在新的坐标系下法线方向为001,此时我们求出新坐标系下更改后的法线,再将该法线映射会原坐标系。
**三维纹理:**我们也可以定义一个三维空间的噪声函数来作为纹理。
外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传
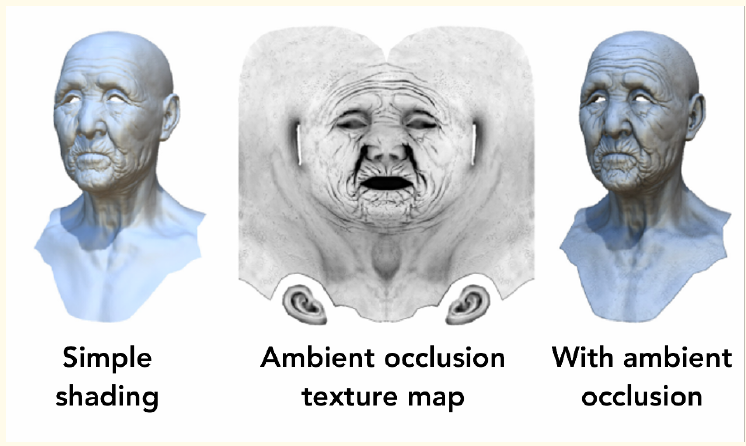
**环境光遮蔽纹理:**我们可以提前算出物体的环境光遮蔽,把他保存为纹理,加速实时渲染。