OpenHarmony - 小型系统内核(LiteOS-A)(十七)标准库
OpenHarmony - 小型系统内核(LiteOS-A)(十七)
二十一、标准库
OpenHarmony内核使用musl libc库,支持标准POSIX接口,开发者可基于POSIX标准接口开发内核之上的组件及应用。
标准库接口框架
图1 POSIX接口框架
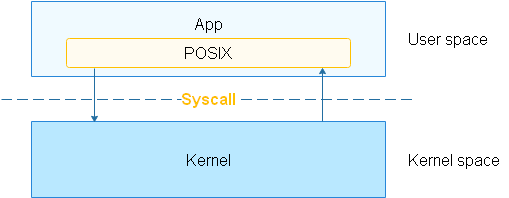
musl libc库支持POSIX标准,涉及的系统调用相关接口由OpenHarmony内核适配支持 ,以满足接口对外描述的功能要求。
标准库支持接口的详细情况请参考C库的API文档,其中也涵盖了与POSIX标准之间的差异说明。
编程实例
实例描述
在本示例中,主线程创建了THREAD_NUM个子线程,每个子线程启动后等待被主线程唤醒,主线程成功唤醒所有子线程后,子线程继续执行直至生命周期结束,同时主线程通过pthread_join方法等待所有线程执行结束。
编程示例
本演示代码在./kernel/liteos_a/testsuites/kernel/src/osTest.c中编译验证,在TestTaskEntry中调用验证入口函数ExamplePosix。
示例代码如下:
#include <stdio.h>
#include <unistd.h>
#include <pthread.h>#define THREAD_NUM 3
int g_startNum = 0; /* 启动的线程数 */
int g_wakenNum = 0; /* 唤醒的线程数 */struct testdata {pthread_mutex_t mutex;pthread_cond_t cond;
} g_td;/* 子线程入口函数 */
static VOID *ChildThreadFunc(VOID *arg)
{int rc;pthread_t self = pthread_self();/* 获取mutex锁 */rc = pthread_mutex_lock(&g_td.mutex);if (rc != 0) {dprintf("ERROR:take mutex lock failed, error code is %d!\n", rc);goto EXIT;}/* g_startNum计数加一,用于统计已经获得mutex锁的子线程个数 */g_startNum++;/* 等待cond条件变量 */rc = pthread_cond_wait(&g_td.cond, &g_td.mutex);if (rc != 0) {dprintf("ERROR: pthread condition wait failed, error code is %d!\n", rc);(void)pthread_mutex_unlock(&g_td.mutex);goto EXIT;}/* 尝试获取mutex锁,正常场景,此处无法获取锁 */rc = pthread_mutex_trylock(&g_td.mutex);if (rc == 0) {dprintf("ERROR: mutex gets an abnormal lock!\n");goto EXIT;}/* g_wakenNum计数加一,用于统计已经被cond条件变量唤醒的子线程个数 */g_wakenNum++;/* 释放mutex锁 */rc = pthread_mutex_unlock(&g_td.mutex);if (rc != 0) {dprintf("ERROR: mutex release failed, error code is %d!\n", rc);goto EXIT;}
EXIT:return NULL;
}static int ExamplePosix(VOID)
{int i, rc;pthread_t thread[THREAD_NUM];/* 初始化mutex锁 */rc = pthread_mutex_init(&g_td.mutex, NULL);if (rc != 0) {dprintf("ERROR: mutex init failed, error code is %d!\n", rc);goto ERROROUT;}/* 初始化cond条件变量 */rc = pthread_cond_init(&g_td.cond, NULL);if (rc != 0) {dprintf("ERROR: pthread condition init failed, error code is %d!\n", rc);goto ERROROUT;}/* 批量创建THREAD_NUM个子线程 */for (i = 0; i < THREAD_NUM; i++) {rc = pthread_create(&thread[i], NULL, ChildThreadFunc, NULL);if (rc != 0) {dprintf("ERROR: pthread create failed, error code is %d!\n", rc);goto ERROROUT;}}dprintf("pthread_create ok\n");/* 等待所有子线程都完成mutex锁的获取 */while (g_startNum < THREAD_NUM) {usleep(100);}/* 获取mutex锁,确保所有子线程都阻塞在pthread_cond_wait上 */rc = pthread_mutex_lock(&g_td.mutex);if (rc != 0) {dprintf("ERROR: mutex lock failed, error code is %d\n", rc);goto ERROROUT;}/* 释放mutex锁 */rc = pthread_mutex_unlock(&g_td.mutex);if (rc != 0) {dprintf("ERROR: mutex unlock failed, error code is %d!\n", rc);goto ERROROUT;}for (int j = 0; j < THREAD_NUM; j++) {/* 在cond条件变量上广播信号 */rc = pthread_cond_signal(&g_td.cond);if (rc != 0) {dprintf("ERROR: pthread condition failed, error code is %d!\n", rc);goto ERROROUT;}}sleep(1);/* 检查是否所有子线程都已被唤醒 */if (g_wakenNum != THREAD_NUM) {dprintf("ERROR: not all threads awaken, only %d thread(s) awaken!\n", g_wakenNum);goto ERROROUT;}dprintf("all threads awaked\n");/* join所有子线程,即等待其结束 */for (i = 0; i < THREAD_NUM; i++) {rc = pthread_join(thread[i], NULL);if (rc != 0) {dprintf("ERROR: pthread join failed, error code is %d!\n", rc);goto ERROROUT;}}dprintf("all threads join ok\n");/* 销毁cond条件变量 */rc = pthread_cond_destroy(&g_td.cond);if (rc != 0) {dprintf("ERROR: pthread condition destroy failed, error code is %d!\n", rc);goto ERROROUT;}return 0;
ERROROUT:return -1;
}
验证结果
输出结果如下:
pthread_create ok
all threads awaked
all threads join ok
与Linux标准库差异
本节描述了OpenHarmony内核承载的标准库与Linux标准库之间存在的关键差异。更多差异详见C库API文档说明。
进程
-
OpenHarmony用户态进程优先级只支持静态优先级且用户态可配置的优先级范围为10(最高优先级)-31(最低优先级)。
-
OpenHarmony用户态线程优先级只支持静态优先级且用户态可配置的优先级范围为0(最高优先级)-31(最低优先级)。
-
OpenHarmony进程调度策略只支持SCHED_RR, 线程调度策略支持SCHED_RR和SCHED_FIFO。
内存
与Linux mmap的差异
mmap接口原型为:void *mmap (void *addr, size_t length, int prot, int flags, int fd, off_t offset)。
其中,参数fd的生命周期实现与Linux glibc存在差异。具体体现在,glibc在成功调用mmap进行映射后,可以立即释放fd句柄。在OpenHarmony内核中,不允许用户在映射成功后立即关闭相关fd,只允许在取消映射munmap后再进行fd的close操作。如果用户不进行fd的close操作,操作系统将在进程退出时对该fd进行回收。
代码举例
Linux目前支持的情况如下:
int main(int argc, char *argv[])
{int fd;void *addr = NULL;...fd = open(argv[1], O_RDONLY);if (fd == -1){perror("open");exit(EXIT_FAILURE);}addr = mmap(NULL, length, PROT_READ, MAP_PRIVATE, fd, offset);if (addr == MAP_FAILED) {perror("mmap");exit(EXIT_FAILURE);}close(fd); /* OpenHarmony does not support closing fd immediately after the mapping is successful. */ ...exit(EXIT_SUCCESS);
}
OpenHarmony支持的情况如下:
int main(int argc, char *argv[])
{int fd;void *addr = NULL;...fd = open(argv[1], O_RDONLY);if (fd == -1) {perror("open");exit(EXIT_FAILURE);}addr = mmap(NULL, length, PROT_READ, MAP_PRIVATE, fd, offset);if (addr == MAP_FAILED) {perror("mmap");exit(EXIT_FAILURE);}...munmap(addr, length);close(fd); /* Close fd after the munmap is canceled. */exit(EXIT_SUCCESS);
}
文件系统
系统目录:用户无权限修改系统目录和设备挂载目录。包含/dev,/proc,/app,/bin,/data,/etc,/lib,/system,/usr目录。
用户目录:用户可以在该目录下进行文件创建、读写,但不能进行设备挂载。用户目录指/storage目录。
除系统目录与用户目录之外,用户可以自行创建文件夹进行设备的挂载。但是要注意,已挂载的文件夹及其子文件夹不允许重复或者嵌套挂载,非空文件夹不允许挂载。
信号
-
信号默认行为不支持STOP、CONTINUE、COREDUMP功能。
-
无法通过信号唤醒正在睡眠状态(举例:进程调用sleep函数进入睡眠)的进程。原因:信号机制无唤醒功能,当且仅当进程被CPU调度运行时才能处理信号内容。
-
进程退出后会发送SIGCHLD给父进程,发送动作无法取消。
-
信号仅支持1-30号信号,接收方收到多次同一信号,仅执行一次回调函数。
Time
OpenHarmony当前时间精度以tick计算,系统默认10ms/tick。sleep、timeout系列函数时间误差<=20ms。