大连理工大学选修课——机器学习笔记(6):决策树
决策树
决策树概述
决策树——非参数机器学习方法
参数方法:
参数估计是定义在整个空间的模型
所有训练数据参与估算
所有的检验输入都用相同的模型和参数
非参数方法:
非参数估计采用局部模型
输入空间被分裂为一系列可以用距离度量的局部空间
每个输入只使用邻近区域由训练样本计算得到的局部模型
决策树特点
-
采用分治策略
- 简洁高效可并行
- 递归
-
输入空间被描述为一种树形结构
- 层次递归
- 内部结点:决策节点
- 叶子结点:决策结果,可做分类,也可做回归分析
决策树方法简介
→每个结点的决策函数都是定义在d维空间的判别式
-
将空间有效地分为较小区域
-
子结点对父结点确定的区域进一步分裂
-
每个结点的决策函数是一个简单函数
- 不同的函数确定不同的判别式形状和区域形状
→可以快速确定输入的区域
- 对于二值分类,每次决策可以排除一半的实例
- 如果是 k k k个类别,可在 l o g 2 k log_2k log2k次决策后找到答案
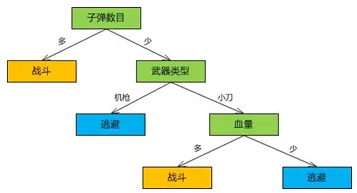
→可解释性好
- 可写成容易理解的决策规则
构建决策树
决策树的构建方法
→只采用一个输入维
- 处理离散变量
- 根据属性值的多少确定分支数量
- 如果是连续数值,则离散化处理
- 处理连续变量
- 根据数值确定阈值: f m ( x ) : x j > w m 0 f_m(x):x_j>w_{m0} fm(x):xj>wm0
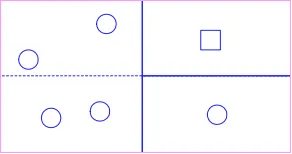
- 将空间一分为二
→构造一棵决策树
L m = { x ∣ x j > w m 0 } R m = { x ∣ x j ≤ w m 0 } 两个区域相互正交,叶子节点定义输入空间的矩形 L_m=\{x|x_j>w_{m0}\}\\ R_m=\{x|x_j\leq w_{m0}\}\\ 两个区域相互正交,叶子节点定义输入空间的矩形 Lm={x∣xj>wm0}Rm={x∣xj≤wm0}两个区域相互正交,叶子节点定义输入空间的矩形
→单变量决策树:每次分裂只用一个特征
-
根据训练样本构造的决策树,称为树归纳。
-
给定的训练集可以构造很多的编码树,要找到最优树:
- 节点数量
- 决策函数复杂度
- NP完全问题
→通常采用贪心算法
单变量决策树的构建问题
→多特征样本在构建时的特征变量选择
- 不同的变量分裂结果不同
- 离散/连续变量分裂也存在差别
→何时分裂会得到最终结果?
- 没有特征变量时,分裂自然终止
- 如果还存在可用的特征变量,是否继续分裂?
→建立决策树过程中的评价方法
- 熵和定义基于熵的评价指标
- 基尼系数
- 分类误差
ID3算法
输入输出
输入:
- 训练数据集 D D D,包含若干样本,每个样本有 d d d个特征和一个类别标签。
- 特征集 A = { A 1 , A 2 , ⋯ , A d } A=\{ A_1,A_2,\cdots,A_d \} A={A1,A2,⋯,Ad}。
- 目标属性(类别标签) C C C。
输出:一棵决策树。
算法步骤:
-
检查终止条件
满足以下任意条件,停止分裂,返回叶子结点:
- 所有样本属于同一类。
- 无剩余特征可用。
- 样本集为空(极少发生)。
-
选择最优分裂特征
对剩余特征逐个计算信息增益,选择增益最大的特征作为当前结点的分裂特征:
-
计算数据集的熵
E n t r o p y ( D ) = − ∑ k = 1 K p k l o g 2 p k Entropy(D)=-\sum_{k=1}^Kp_k\ log_2\ p_k Entropy(D)=−k=1∑Kpk log2 pk
-
计算特征 A i A_i Ai的信息增益
I G ( D , A i ) = E n t r o p y ( D ) − ∑ v ∈ V a l u e s ( A i ) ∣ D v ∣ ∣ D ∣ E n t r o p y ( D v ) IG(D,A_i)=Entropy(D)-\sum_{v\in Values(A_i)}\frac{|D_v|}{|D|}Entropy(D_v) IG(D,Ai)=Entropy(D)−v∈Values(Ai)∑∣D∣∣Dv∣Entropy(Dv)
V a l u e s ( A i ) Values(A_i) Values(Ai):特征 A i A_i Ai的所有可能取值。
D v D_v Dv: D D D中 A i = v A_i=v Ai=v的子集。
-
选择信息增益最大的特征
-
A b e s t = a r g m a x I G ( D , A i ) A_{best}=arg\ maxIG(D,A_i) Abest=arg maxIG(D,Ai)
-
按特征值分裂数据集
根据 A b e s t A_{best} Abest的取值,将 D D D划分为若干子集 D v D_v Dv,每个子集对应一个分支。
- ID3算法存在的问题
- 只能处理离散属性
- 更多值属性偏向问题:当一个属性具有大量可能值时,ID3算法倾向于选择该属性进行分裂,即使它可能不是最有信息量的属性。如:ID号可能会被优先选择,因为它的可能值很多。
C4.5算法
- 改进:
- 连续属性的离散化
- 解决多值属性的偏向
-
信息增益计算的标准化
引入增益率,通过特征的固有信息对信息增益进行归一化:
I R ( D , A ) = I ( A , D ) H A ( D ) ( H A ( D ) = − ∑ i = 1 n ∣ D i ∣ D l o g 2 ∣ D i ∣ D ) I_R(D,A)=\frac{I(A,D)}{H_A(D)}\\ (H_A(D)=-\sum_{i=1}^n\frac{|D_i|}{D}log_2\frac{|D_i|}{D}) IR(D,A)=HA(D)I(A,D)(HA(D)=−i=1∑nD∣Di∣log2D∣Di∣)
I R ( D , A ) I_R(D,A) IR(D,A):增益率。
H A ( D ) H_A(D) HA(D):固有信息,衡量特征 A i A_i Ai的取值分布的均匀性。
其中n为特征 A 的类别数, Di为特征 A的第i个取值对应的样本个数,|D| 为样本个数。
-
CART算法
-
特点
- 使用基尼系数选择分裂用的最优特征
- 建立的决策树是二叉树
-
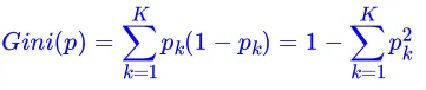
基尼系数的计算
假设有K个类别,第k个类别的概率为pk , 则基尼系数的表达式为:
对于二值分类:

对于样本D,如果根据特征A的某个值a,把D分成D1和D2两部分,则在特征A的条件下,D的基尼系数表达式:

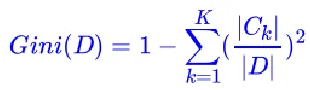
对于个给定的样本D,假设有K个类别,第k个类别的数量|Ck|为,则样本D的基尼系数表达式为:
-
连续属性的离散化处理
处理思路与C4.5一样,衡量的标准是基尼系数,连续属性还会参与后续的结点分裂 -
二叉树的实现
找到基尼系数最小的二分结果
例如{A2}和{A1, A3},建立二叉树
后续还有机会对结点{A1, A3}按照特征A进行分裂 -
算法描述
算法输入是训练集D,基尼系数的阈值,样本数量的阈值输出是决策树T
- 对于当前结点的数据集为D,如果样本个数小于阈值或者没有特征,则返回决策子树,当前结点停止递归;
- 计算样本集D的基尼系数,如果基尼系数小于阈值,则返回决策树子树,当前结点停止递归;
- 计算当前结点现有的各个特征的各个特征值对数据集D的基尼系数;
- 在计算出来的各个特征的各个取值对数据集D的基尼系数中,选择基尼系数最小的特征A和对应的取值a。根据这个最优特征和最优值,把数据集分裂成两部分D1和D2,同时建立当前结点的左右结点,左结点的数据集为D1,右结点的数据集为D2;
- 对左右的子结点递归的调用1-4步,生成决策树。
-
特殊处理
CART的叶子结点的不纯性不一定降到最低:叶子结点中的样本可能会属于多个类
在用CART树做预测时,选择训练样本所占比例最大的类别作为预测结果
或者在构建决策树时,将叶子结点的类别标签选择为比例最大的训练样本类别 -
建立回归树
- ID3和C4.5只建立分类树
这一点限制了两个算法的使用范围 - CART的长处除了计算量小以外,还有该算法既可以做分类又可以做回归
- CART的回归树和分类树大同小异
回归的输出是连续的
设置为到达该结点所有样本实例输出的均值
分裂属性选择的衡量标准是分类误差
- ID3和C4.5只建立分类树
-
均方误差度量
定义二值化的指示函数
结点m的预测输出:
结点m的误差:

-
分裂的操作
如果结点m的误差太大,不能接受(根据预设的阈值判断),需要对结点进行分裂
在众多选的分裂结果中选择诸分支误差和最小的,每次递归的分裂都是得到二分的结果
对于结点m的分支 j:
分裂后的总误差:

-
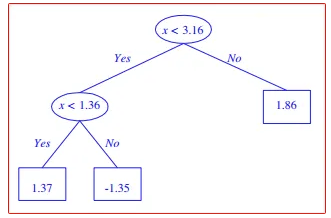
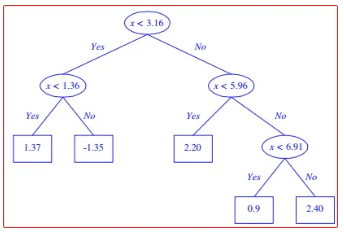
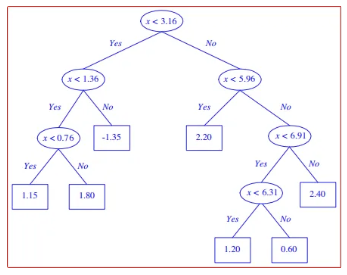
误差阈值
-
调节模型复杂程度的超参数
-
图片为误差阈值降低后树的变化
过拟合
-
过拟合问题:不要期望把结点的不纯性降到最低,小于某个阈值即可
剪枝
- 先剪枝
到达一个结点的实例数小于训练集的某个百分比(设个阈值,例如5%),然后就停止该结点的进一步分裂。速度快,但效果不是很理想。
- 后剪枝
先让树完全增长至零训练误差或者结点不纯性降到最低,然后剪掉导致过拟合的子树。
后剪枝是全局搜索,效果更好,但会很慢。
几种量化结点纯度的指标对比
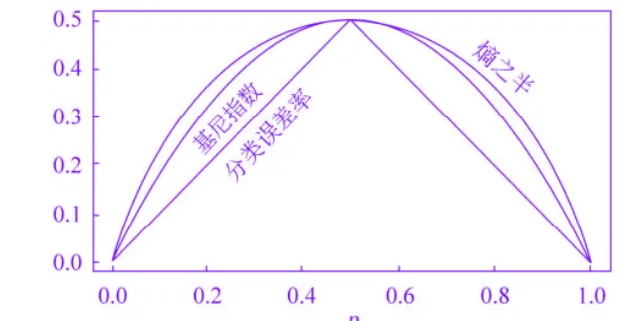
基尼系数是熵的一个很好的近似
熵与信息增益
熵的概念
——熵度量了事物的不确定性
-
越不确定的事物,熵越大
-
随机事件X的熵定义:
H ( X ) = − ∑ i = 1 n p i l o g p i H(X)=-\sum_{i=1}^np_ilogp_i H(X)=−i=1∑npilogpi
-
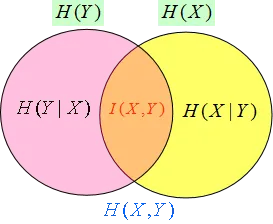
联合熵:
H ( X , Y ) = − ∑ p ( x i , y i ) l o g p ( x i , y i ) H(X,Y)=-\sum p(x_i,y_i)logp(x_i,y_i) H(X,Y)=−∑p(xi,yi)logp(xi,yi)
- 条件熵
H ( X ∣ Y ) = − ∑ p ( x i , y i ) l o g p ( x i ∣ y i ) = ∑ p ( y j ) H ( X ∣ y j ) H(X|Y)=-\sum p(x_i,y_i)logp(x_i|y_i)=\sum p(y_j)H(X|y_j) H(X∣Y)=−∑p(xi,yi)logp(xi∣yi)=∑p(yj)H(X∣yj)
信息增益
- 信息增益也称为互信息
- 定义如下:
I ( X , Y ) = H ( X ) − H ( X ∣ Y ) I(X,Y)=H(X)-H(X|Y) I(X,Y)=H(X)−H(X∣Y)
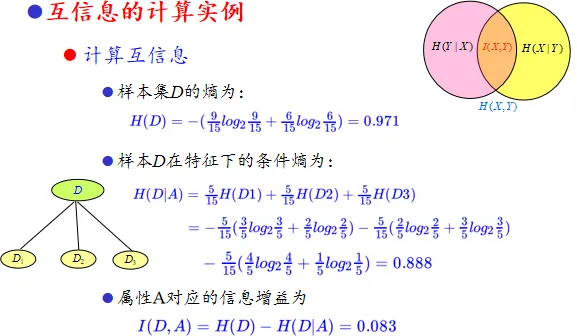
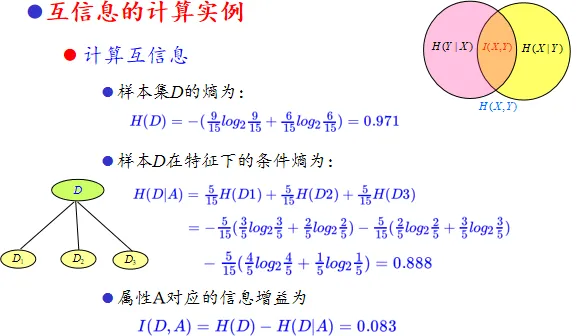
计算实例:
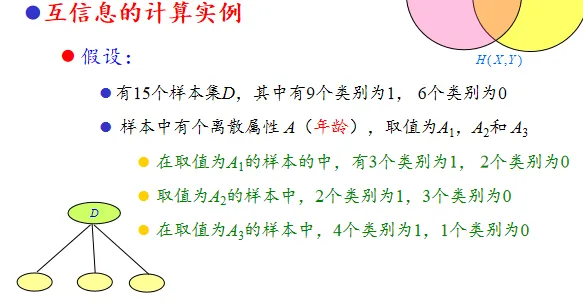
树结点度量指标
→度量结点的不纯性
-
用熵描述结点m的不纯性
I m = H ( C ) = − ∑ i = 1 K p m i l o g p m i I_m=H(C)=-\sum_{i=1}^Kp_m^ilogp_m^i Im=H(C)=−i=1∑Kpmilogpmi
p m i p_m^i pmi表示第 i i i类样本所占比例
如果结点不需要分裂(到达结点m的所有实例只属于一个类别C,没有不确定性),则不纯性 I m = 0 I_m=0 Im=0,即 H ( C ) − 0 H(C)-0 H(C)−0。
-
子结点不纯性的计算
假设父节点 m m m的离散属性有n个取值,即有n个输出
- 连续属性有两个输出 ( n = 2 ) (n=2) (n=2),有如下统计:
∑ j = 1 n N m j = N m \sum_{j=1}^nN_{mj}=N_m j=1∑nNmj=Nm
N m j N_{mj} Nmj个实例中有 N m j i N_{mj}^i Nmji个属于类 C i C_i Ci
∑ i = 1 K N m j i = N m j ∑ i = 1 n N m j i = N m i \sum_{i=1}^K N_{mj}^i = N_{mj}\qquad \sum_{i=1}^n N_{mj}^i=N_m^i i=1∑KNmji=Nmji=1∑nNmji=Nmi
p ^ ( C i ∣ x , m , j ) = p m l i = N m j i N m j \hat p(C_i|x,m,j)=p_{ml}^i=\frac{N_{mj}^i}{N_{mj}} p^(Ci∣x,m,j)=pmli=NmjNmji
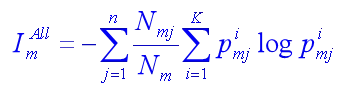
n个子结点的总不纯度为:
分裂选用的特征
- 每次分裂需要选择特定的属性进行
-
选择的策略:
-
能使不纯度下降最大的属性:
I m − I m A H I_m-I_m^{AH} Im−ImAH
-
能使信息增益最大的属性
两个随机变量之间的统计依赖性或信息共享程度
衡量已知一个变量的信息后,另一个变量的不确定性减少的程度
I ( X m , C m j ) = H ( X m ) − H ( X m ∣ C m j ) I(X_m, C_{mj})=H(X_m)-H(X_m|C_{mj}) I(Xm,Cmj)=H(Xm)−H(Xm∣Cmj)
-
-
连续属性的处理
- 通常,构建决策树时只考虑使用离散属性
- 而连续属性需要转换成只有两个取值的离散属性
- 可以选择使用所可能取值的平均值/均值作为阈值。
决策树C4.5算法的处理
设样本的连续属性有m个不同取值,将所有取值排序,取所有相邻的两个值,计算他们的均值,从而得到 m − 1 m-1 m−1个均值,将它们作为候选阈值。测试用每个阈值分裂二值结果的互信息,选择能带来最大互信息的均值作为最后的阈值进行二值分裂。
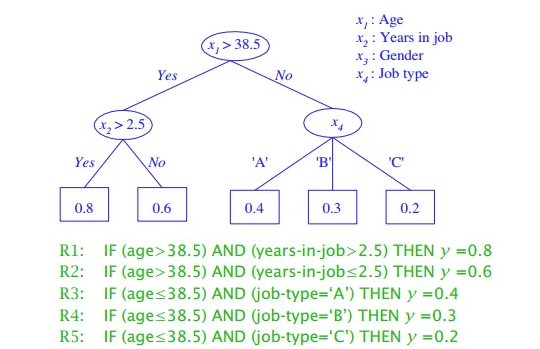
使用决策树
-
决策树的每一条从根到叶子的路径:对应的条件的合取(AND)。
-
对于分类树,可能有过个叶子被标记为相同的类:多个路径对应的条件用析取(OR)。
-
各个路径可以用IF-THEN规则表示
几种经典模型的对比
| 算法 | 支持
模型 | 树结构 | 特征选择 | 连续值
处理 | 缺失值
处理 | 剪枝 |
| — | — | — | — | — | — | — |
| ID3 | 分类 | 多叉树 | 信息增益 | 不支持 | 不支持 | 不支持 |
| C4.5 | 分类 | 多叉树 | 信息增益比 | 支持 | 支持 | 支持 |
| CART | 分类,
回归 | 二叉树 | 基尼系数,
均方差 | 支持 | 支持 | 支持 |
决策树模型评价
- 优点
1)简单直观,生成的决策树很直观
2)基本不需要预处理,不需要提前归一化
3)相比于神经网络之类的黑盒分类模型,决策树在逻辑上
可以得到很好的解释
4)可以交叉验证的剪枝来选择模型,从而提高泛化能力
5)对于异常点的容错能力好,健壮性高。
- 缺点
- 决策树算法非常容易过拟合,导致泛化能力不强
- 通常把决策树用作基准模型(baseline)
- 或作为集成学习的弱学习模型
- 决策树会因为样本发生一点点的改动,就会导致树
结构的剧烈改变 - 寻找最优的决策树是一个NP难的问题,我们一般是
通过启发式方法,容易陷入局部最优。
总结
- 每个类可能存在对各分支对应的多个解释和描述
- 这些不同的解释可能会在空间中不相交
- 不必考虑各个区域(特征子空间)上的分布信息
- 直接对分离类实例的判别式进行编码
- 属于基于判别式的(discriminant-based)方法
- 更多地应用于分类