后向投影合成孔径辐射源定位方法(一)
系列文章目录
《辐射源定位方法简述》
文章目录
系列文章目录
前言
一、信号模型
二、定位方法
三、仿真实验
总结
前言
高精度辐射源定位一直是无源定位技术的研究热点。合成孔径定位(SAP)由于多普勒信号沿方位长时间相干积累,在低信噪比环境下定位精度上优于传统辐射源定位方法。本文主要介绍后向投影合成孔径辐射源定位方法。
一、信号模型
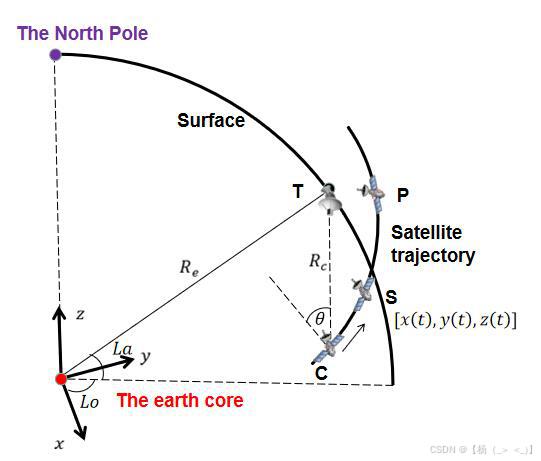
图 1 展示了辐射源位置的几何模型。地球表面的辐射源目标 T 发射出向各个方向均匀分布的电磁信号,其在地球中心地固坐标系中的坐标为 。卫星轨迹为
,卫星在点 P 处距离目标最近,对应于零多普勒时间
。在点 C 处,卫星上的接收器接收到来自辐射源目标 T 的信号,对应于时间
,此时目标的斜角为
,目标的斜距为
。
考虑辐射源目标发射信号:
其中,,
为采样间隔,
为基带信号,
是传输信号
的载波频率。
考虑到信号自由传播所导致的强度衰减以及延迟的影响,接收信号可表示为
其中,为振幅,
为电磁波的传播速度,
为信号的未知传输时间,而
表示高斯白噪声。
为目标与卫星之间的瞬时距离。
下变频后的接收信号为:
考虑发射信号为单频信号,则
二、定位方法
BPP 方法根据目标的倾斜角度和倾斜距离构建了一个成本函数,利用了卫星的运行轨迹。图 4 展示了 BPP 方法的示意图。首先,将检测区域划分为网格。随后,考虑到解调的影响,计算每个网格点对应的多普勒信号。最后,将计算得到的多普勒信号与接收到的多普勒信号进行相干处理,以生成检测区域的定位图像。具体步骤如下:
1)网格剖分.
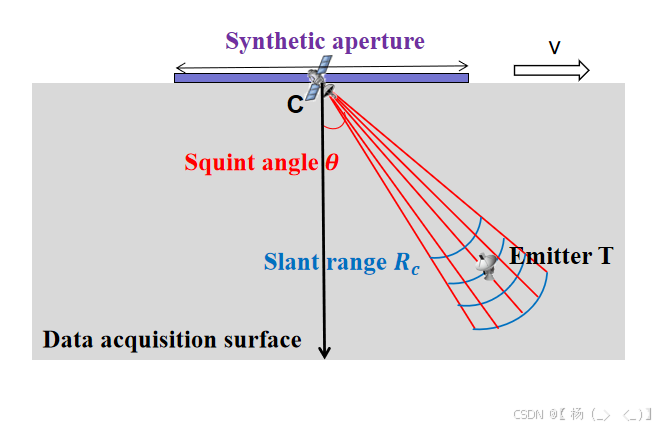
在实际定位过程中,为降低运算量,考虑在数据获取面上进行网格剖分,如图3所示。在实际定位过程中,为降低运算量,考虑在数据获取面上进行网格剖分,如图3所示,孔径中心C的位置为,速度为
。对于剖分的网格点
,其斜视角为
,
,斜距为
,
,对应于地面的坐标
,其具体的映射关系(理论上存在两个解,选择其中一个进行分析)如所示:
其中
其中为图 1 中所示的地球半径,
,
。
BP搜索的网格大小由分辨率决定,网格剖分间隔不能小于分辨率值。斜视角分辨率为:
斜距分辨率
为了使定位精度更加精确,搜索网格应该尽量小,当小于定位标准差时,网格间隔的减少对定精度影响不大。此外,分辨率参数也能反映BPP方法定位多目标时的分辨能力。
2)多普勒历程的后向投影.
基于平台运动轨迹,
表示网格点
与平台的瞬时距离。考虑信号预处理对多普勒信号的影响,计算不同网格点
的多普勒信号:
3)多普勒历程的相干累加
用后向投影得到的多普勒信号补偿信号预处理得到的多普勒信号的相位并进行累加,将得到的相关值作为网格点的定位结果:
其中表示合成孔径持续时间。
4)辐射源目标搜索
搜索定位图像的峰值,将峰值位置对应的斜视角、斜距作为目标的位置。
三、仿真实验
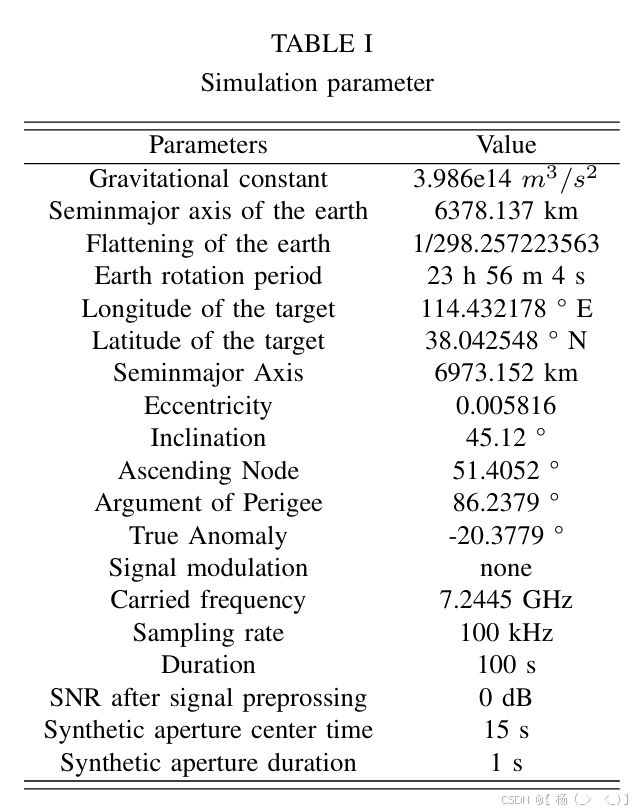
为了验证在噪声环境下BPP定位精度公式以及频偏对BPP结果的影响公式,设计了单频辐射辐射源的仿真实验,仿真参数如表1所示。根据上述仿真参数,生成卫星轨道数据,数据更新时间间隔与信号采样间隔一致。考虑辐射源信号为单频信号,根据卫星轨迹数据与目标之间的几何关系生成采样率100kHz多普勒信号,并在其中叠加热噪声生成最后接收的辐射源信号,信噪比0dB。将接收信号经过7.2445 GHz的下变频即可得到目标多普勒信号。
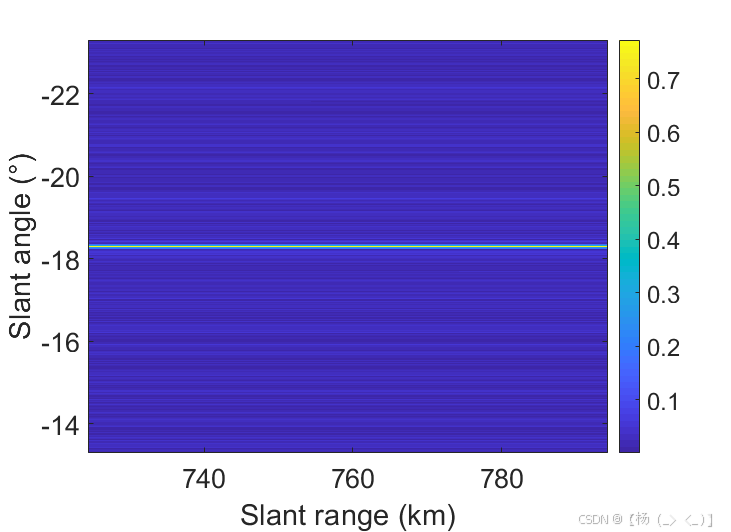
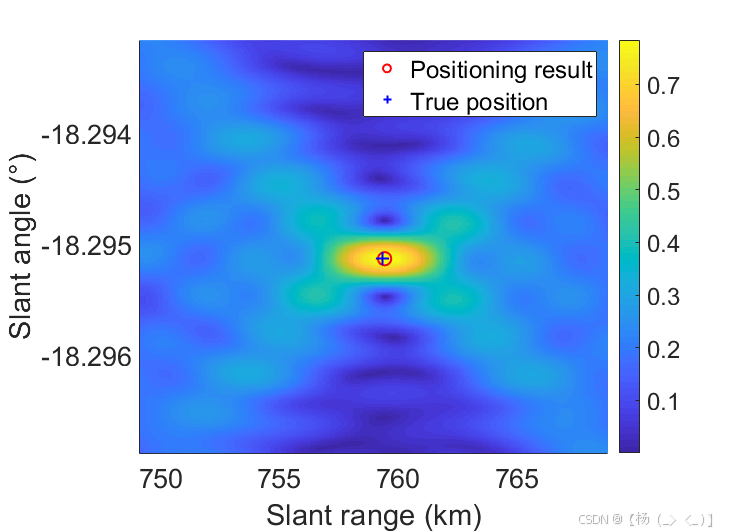
为了对大范围内的目标快速精准定位,我们采用了精搜加粗搜的搜索策略。图4(a)(b)分别为BPP粗搜结果以及精搜结果。粗搜合成孔径时间为0.01 s,斜视角搜索范围10°,斜距搜索范围60km;精搜过程合成孔径时间为1 s,斜视角划分间隔1e-5°,斜距划分间隔100m。在进行精搜时,为了降低每个网格点搜索的计算量,考虑对接收的信号进行下采样,下采样后的信号采样率为1000 Hz。从结果可以看出,BPP定位图像聚焦性好,噪声对定位的影响很小。
总结
本文介绍后向投影合成孔径辐射源定位方法,其具备高分辨高精度定位性能,后续将补充方法性能分析。转载请附上链接:【杨(_> <_)】的博客_CSDN博客-信号处理,SAR,代码实现领域博主