基于二进制XOR运算的机器人运动轨迹与对称图像自动生成算法
原创:项道德(daode3056,daode1212)
新的算法出现,往往能给某些行业与产业带来革命与突破。为探索机器人运动轨迹与对称图像自动生成算法,本人已经通过18种算法的测试,最终,以二进制的XOR运算为最简便,快速而又丰富。以下是这一算法的一些截图:
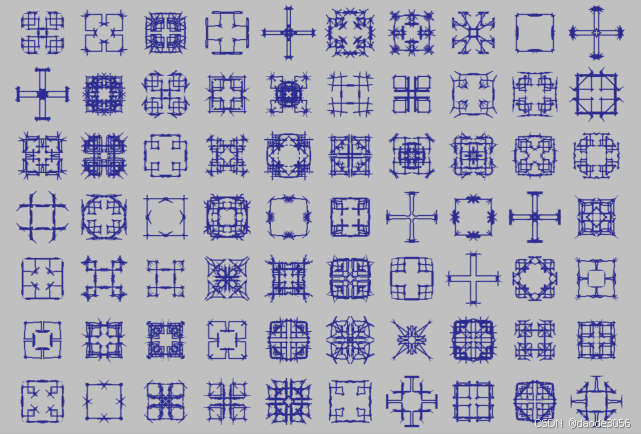
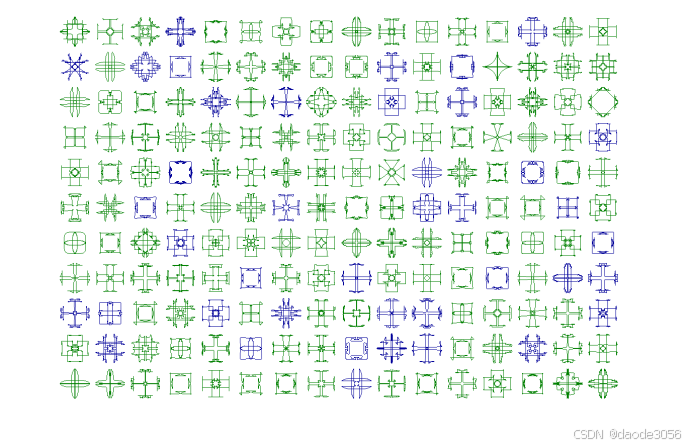
这一算法的出现,它既为机器人运动轨迹设计提供了方便,也为对称图案、图像的设计提供了方便,可广泛应用于镭射灯光、印染、纺织、陶瓷、地砖、墙纸、日用品等的图案设计与选择。以下是算法的解释:
一,设计正多边形,如外接圆半径R=357,边数Sn=60;
二,将圆心坐标放在原点(0,0),计算上述多边形各顶点坐标:{Xi,Yi},i=0,1,2,3,...,60.
三,再取一个新的整数N(N≠R),如取N=431,将第一象限的各坐标按下面的函数计算新值:
Xi'=XOR(Xi,N), Yi'=XOR(Yi,N),
四,将第一象限的各新坐标{Xi',Yi'},i=0,1,2,3,...,15.按轴对称方法分别复制到第二,三,四象限。
五,用折线连续连接各新坐标{Xi',Yi'},i=0,1,2,3,...,60. 如果想要平滑曲线,可通过Bezier插值连接它们,但是点集总的数目应该是3n+1(n是正整数)。
六,当参数R、N相差太大时生成的图像可能大小也不一致,这时需加上新的算法控制出图的大小。作者为生成一致大小的图像是经过最远距离控制的。
使用C#+OpenTK编程的源代码与截图如下:
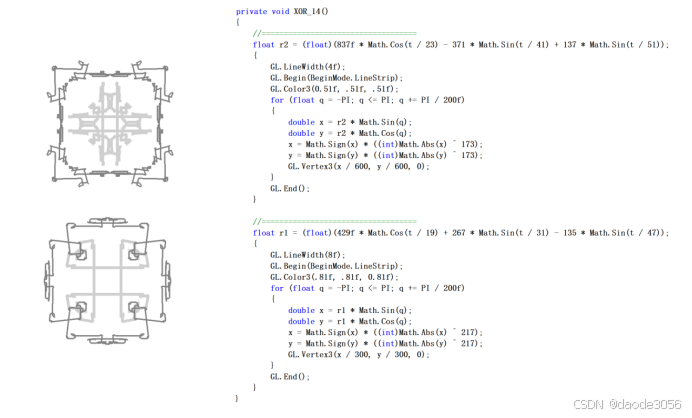
读者可以自行转换成所熟悉的语言。
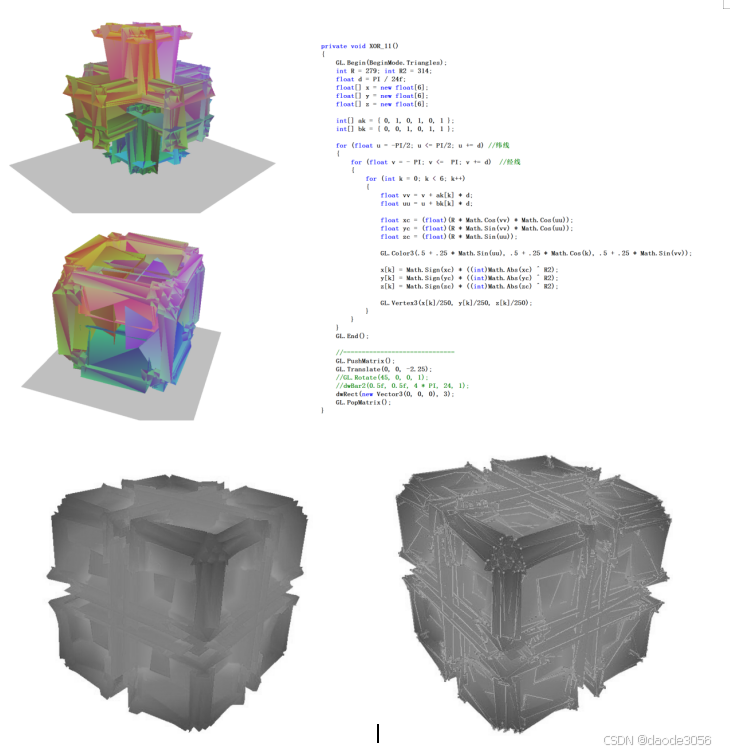
本算法延伸到三维,生成了一些复杂的结构体,类似一种新型的分形算法:
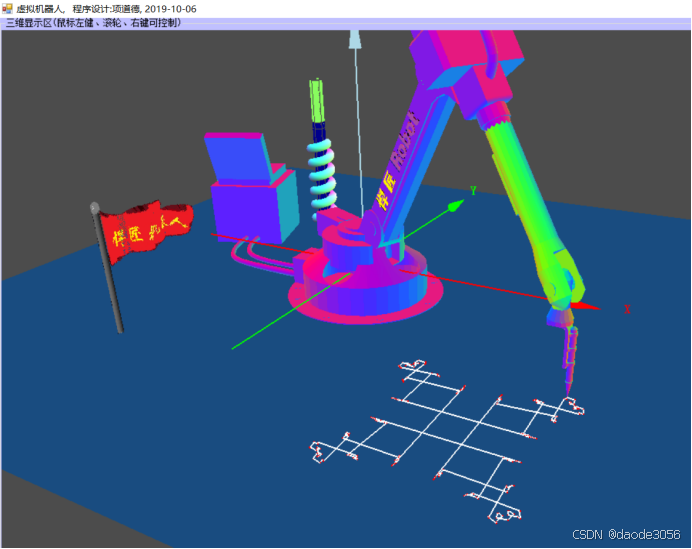
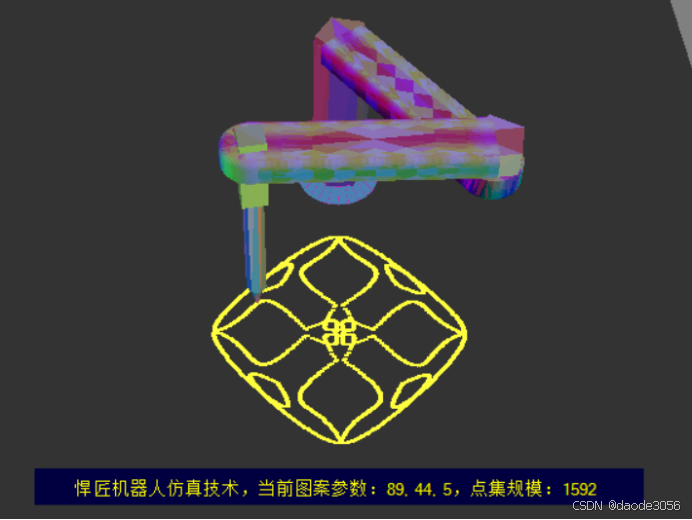
在控制机器人方面,作者自己编写的六轴关节机器人与SCARA机器人上,用这类算法产生的曲线进行引导,效果如下:
算法已经这样了,作者在2022年,已经申请了发明专利,欢迎大家继续研究与拓展。
