Modbus协议全方位解析与C#开发实战指南
文章目录
- 第一部分:Modbus协议基础
- 1. Modbus协议概述
- 2. Modbus协议变体
- 3. Modbus通信模型
- 4. Modbus数据模型
- 第二部分:Modbus协议细节
- 1. Modbus RTU协议帧结构
- 2. Modbus TCP/IP协议帧结构
- 3. Modbus功能码
- 4. Modbus数据编码
- 第三部分:C# Modbus开发基础
- 1. 开发环境准备
- 2. NModbus库概述
- 3. 创建Modbus TCP主站
- 4. 创建Modbus RTU主站
- 第四部分:高级Modbus开发技术
- 1. 处理Modbus异常
- 2. 大数据量读取优化
- 3. 数据类型转换
- 4. 实现Modbus从站(服务器)
- 第五部分:实战项目 - Modbus数据监控系统
- 1. 项目需求
- 2. 系统架构设计
- 3. 核心代码实现
- 第六部分:性能优化与最佳实践
- 1. Modbus通信优化技巧
- 2. 错误处理与恢复
- 3. 线程安全考虑
- 4. 日志记录与诊断
- 第七部分:高级主题与扩展
- 1. Modbus与OPC UA集成
- 2. Modbus网关实现
- 3. Modbus安全考虑
- 第八部分:常见问题与解决方案
- 1. Modbus通信常见问题
- 2. 调试技巧
- 3. 性能调优
- 第九部分:Modbus开发资源与工具
- 1. 开发资源
- 2. 硬件设备
- 3. 学习资源
- 第十部分:总结与展望
- 1. Modbus协议的优势与局限
- 2. Modbus的未来发展
- 3. 选择Modbus的建议
- 4. 结束语
第一部分:Modbus协议基础
1. Modbus协议概述
Modbus是一种串行通信协议,最初由Modicon公司(现为施耐德电气的一部分)于1979年开发,用于其可编程逻辑控制器(PLC)。由于其简单性、开放性和易于实现的特点,Modbus已成为工业领域最流行的通信协议之一。
Modbus的核心特点:
- 主从式架构(客户端/服务器模式)
- 支持多种电气接口(RS-232、RS-485、TCP/IP等)
- 公开的协议规范,无需授权费用
- 轻量级协议,适用于资源受限设备
- 支持多种数据类型的读写操作
2. Modbus协议变体
Modbus协议有多种变体,适用于不同的物理层:
- Modbus RTU:基于二进制编码,通过串行接口(通常是RS-485或RS-232)传输
- Modbus ASCII:使用ASCII字符表示数据,通过串行接口传输
- Modbus TCP/IP:基于TCP/IP协议栈,通过以太网传输
- Modbus Plus:高速令牌传递网络,需要专用硬件
在实际应用中,Modbus RTU和Modbus TCP/IP是最常用的两种变体。
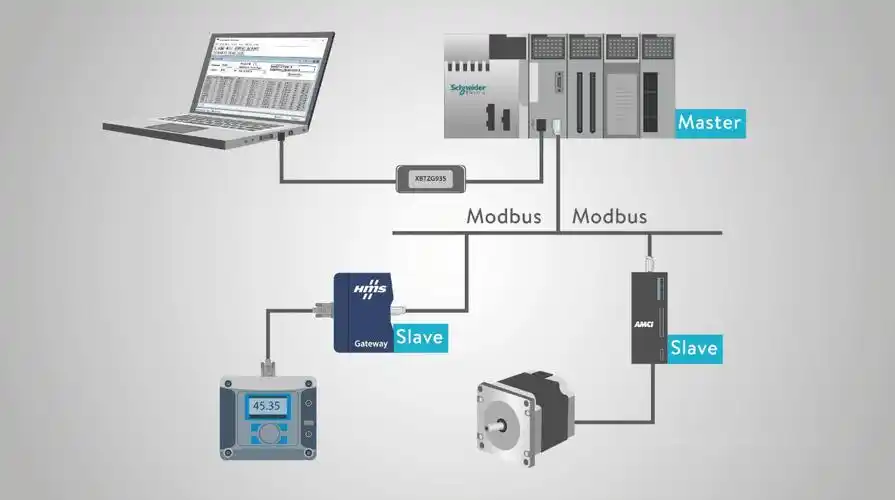
3. Modbus通信模型
Modbus采用简单的请求-响应模型:
- 主设备(客户端)向从设备(服务器)发送请求
- 从设备处理请求并返回响应
- 主设备接收并解析响应
一个Modbus网络中通常有:
- 1个主设备(发起通信)
- 最多247个从设备(每个有唯一地址1-247)
4. Modbus数据模型
Modbus定义了四种不同的数据区域,每种区域有特定的访问权限:
| 数据类型 | 访问权限 | 地址范围 | 说明 |
|---|---|---|---|
| 线圈(Coils) | 读写 | 0xxxx | 1位,布尔值(ON/OFF) |
| 离散输入 | 只读 | 1xxxx | 1位,布尔值 |
| 输入寄存器 | 只读 | 3xxxx | 16位,模拟量输入 |
| 保持寄存器 | 读写 | 4xxxx | 16位,模拟量输出 |
注意:这里的"x"表示数字,实际地址从0开始,但在协议中通常使用偏移量(如线圈地址0对应协议中的000001)。
第二部分:Modbus协议细节
1. Modbus RTU协议帧结构
Modbus RTU帧结构如下:
| 字段 | 长度 | 说明 |
|---|---|---|
| 从站地址 | 1字节 | 1-247 (0为广播地址) |
| 功能码 | 1字节 | 指示要执行的操作类型 |
| 数据 | N字节 | 取决于功能码 |
| CRC校验 | 2字节 | 循环冗余校验 |
RTU帧特点:
- 帧间至少要有3.5个字符时间的静默间隔
- 整个帧必须作为连续流传输
- 采用大端字节序(Big-Endian)
2. Modbus TCP/IP协议帧结构
Modbus TCP/IP在RTU基础上增加了MBAP头:
| 字段 | 长度 | 说明 |
|---|---|---|
| 事务标识符 | 2字节 | 用于请求/响应匹配 |
| 协议标识符 | 2字节 | 0表示Modbus协议 |
| 长度字段 | 2字节 | 后续字节数 |
| 单元标识符 | 1字节 | 通常与RTU从站地址相同 |
| 功能码 | 1字节 | 同RTU |
| 数据 | N字节 | 同RTU |
3. Modbus功能码
Modbus定义了多种功能码,主要分为三类:
常用功能码:
| 代码 | 名称 | 作用 |
|---|---|---|
| 01 | 读线圈状态 | 读取一个或多个线圈的ON/OFF状态 |
| 02 | 读离散输入 | 读取离散输入的状态 |
| 03 | 读保持寄存器 | 读取保持寄存器的内容 |
| 04 | 读输入寄存器 | 读取输入寄存器的内容 |
| 05 | 写单个线圈 | 强制单个线圈ON或OFF |
| 06 | 写单个寄存器 | 写入单个保持寄存器 |
| 15 | 写多个线圈 | 强制多个线圈ON或OFF |
| 16 | 写多个寄存器 | 写入多个保持寄存器 |
异常响应:
当从设备检测到错误时,会返回异常响应,将功能码的最高位置1(即原功能码+0x80),并附加异常码。
4. Modbus数据编码
Modbus使用大端字节序(Big-Endian)存储多字节数据。对于32位浮点数,通常有两种排列方式:
- ABCD (大端字节序)
- CDAB (Modbus标准,也称为"字节交换")
- BADC (字交换)
- DCBA (字节和字交换)
在开发时需要注意设备使用的具体格式。
第三部分:C# Modbus开发基础
1. 开发环境准备
所需工具:
- Visual Studio (2017或更高版本)
- .NET Framework 4.5+ 或 .NET Core 3.1+
- Modbus模拟工具(如Modbus Slave)
NuGet包:
对于Modbus开发,推荐使用以下库:
- NModbus (最流行的开源Modbus库)
- EasyModbusTCP (商业库的免费版本)
安装命令:
Install-Package NModbus
Install-Package EasyModbusTCP
2. NModbus库概述
NModbus是一个开源的Modbus实现,支持:
- Modbus RTU (串行通信)
- Modbus TCP/IP (以太网通信)
- Modbus UDP
- 主站和从站实现
核心类:
ModbusFactory- 创建主站/从站实例的工厂类IModbusMaster- 主站接口IModbusSlave- 从站接口ModbusSerialMaster- 串行主站实现ModbusTcpMaster- TCP主站实现
3. 创建Modbus TCP主站
using System;
using System.Net.Sockets;
using Modbus.Device;class ModbusTcpMasterExample
{public static void Main(){// 创建TCP客户端连接TcpClient tcpClient = new TcpClient("127.0.0.1", 502);// 创建Modbus TCP主站IModbusMaster master = ModbusIpMaster.CreateIp(tcpClient);try{// 读取保持寄存器 (功能码03)ushort startAddress = 0;ushort numRegisters = 10;ushort[] registers = master.ReadHoldingRegisters(1, startAddress, numRegisters);Console.WriteLine("读取到的寄存器值:");for (int i = 0; i < registers.Length; i++){Console.WriteLine($"寄存器 {startAddress + i}: {registers[i]}");}// 写入单个寄存器 (功能码06)ushort registerAddress = 5;ushort value = 12345;master.WriteSingleRegister(1, registerAddress, value);Console.WriteLine($"已写入寄存器 {registerAddress} 值为 {value}");}finally{// 清理资源master.Dispose();tcpClient.Close();}}
}
4. 创建Modbus RTU主站
using System;
using System.IO.Ports;
using Modbus.Device;class ModbusRtuMasterExample
{public static void Main(){// 配置串口SerialPort serialPort = new SerialPort("COM3", 9600, Parity.None, 8, StopBits.One);try{// 打开串口serialPort.Open();// 创建Modbus RTU主站IModbusSerialMaster master = ModbusSerialMaster.CreateRtu(serialPort);// 设置超时master.Transport.ReadTimeout = 1000;master.Transport.WriteTimeout = 1000;// 读取输入寄存器 (功能码04)byte slaveId = 1;ushort startAddress = 0;ushort numRegisters = 5;ushort[] inputRegisters = master.ReadInputRegisters(slaveId, startAddress, numRegisters);Console.WriteLine("读取到的输入寄存器值:");for (int i = 0; i < inputRegisters.Length; i++){Console.WriteLine($"输入寄存器 {startAddress + i}: {inputRegisters[i]}");}// 写入多个线圈 (功能码15)ushort coilAddress = 10;bool[] coilValues = { true, false, true, true, false };master.WriteMultipleCoils(slaveId, coilAddress, coilValues);Console.WriteLine("已写入多个线圈状态");}catch (Exception ex){Console.WriteLine($"发生错误: {ex.Message}");}finally{// 清理资源serialPort?.Close();}}
}
第四部分:高级Modbus开发技术
1. 处理Modbus异常
Modbus设备可能返回异常响应,我们需要正确处理这些异常:
try
{// 尝试读取不存在的寄存器ushort[] registers = master.ReadHoldingRegisters(1, 10000, 10);
}
catch (Modbus.SlaveException ex)
{Console.WriteLine($"Modbus异常: {ex.Message}");Console.WriteLine($"功能码: {ex.FunctionCode}");Console.WriteLine($"异常码: {ex.SlaveExceptionCode}");// 常见异常码switch (ex.SlaveExceptionCode){case 1:Console.WriteLine("非法功能码");break;case 2:Console.WriteLine("非法数据地址");break;case 3:Console.WriteLine("非法数据值");break;case 4:Console.WriteLine("从站设备故障");break;default:Console.WriteLine("未知异常");break;}
}
2. 大数据量读取优化
当需要读取大量数据时,Modbus的单个请求限制(通常最多125个寄存器)可能导致效率低下。我们可以实现分段读取:
public static ushort[] ReadLargeRegisters(IModbusMaster master, byte slaveId, ushort startAddress, ushort numberOfPoints, ushort maxBatchSize = 125)
{List<ushort> results = new List<ushort>();ushort remaining = numberOfPoints;ushort currentAddress = startAddress;while (remaining > 0){ushort batchSize = (remaining > maxBatchSize) ? maxBatchSize : remaining;try{ushort[] batch = master.ReadHoldingRegisters(slaveId, currentAddress, batchSize);results.AddRange(batch);currentAddress += batchSize;remaining -= batchSize;}catch (Exception ex){Console.WriteLine($"读取地址 {currentAddress} 失败: {ex.Message}");throw;}}return results.ToArray();
}
3. 数据类型转换
Modbus寄存器存储的是16位无符号整数,但实际数据可能是其他类型:
// 将两个寄存器转换为32位整数
public static int ConvertToInt32(ushort highRegister, ushort lowRegister, bool isBigEndian = true)
{byte[] bytes = new byte[4];if (isBigEndian){bytes[0] = (byte)(highRegister >> 8);bytes[1] = (byte)highRegister;bytes[2] = (byte)(lowRegister >> 8);bytes[3] = (byte)lowRegister;}else{bytes[0] = (byte)(lowRegister >> 8);bytes[1] = (byte)lowRegister;bytes[2] = (byte)(highRegister >> 8);bytes[3] = (byte)highRegister;}return BitConverter.ToInt32(bytes, 0);
}// 将两个寄存器转换为IEEE 754浮点数
public static float ConvertToFloat(ushort highRegister, ushort lowRegister, bool isBigEndian = true)
{byte[] bytes = new byte[4];if (isBigEndian){bytes[0] = (byte)(highRegister >> 8);bytes[1] = (byte)highRegister;bytes[2] = (byte)(lowRegister >> 8);bytes[3] = (byte)lowRegister;}else{bytes[0] = (byte)(lowRegister >> 8);bytes[1] = (byte)lowRegister;bytes[2] = (byte)(highRegister >> 8);bytes[3] = (byte)highRegister;}return BitConverter.ToSingle(bytes, 0);
}
4. 实现Modbus从站(服务器)
using System;
using System.Net;
using System.Net.Sockets;
using Modbus.Device;
using Modbus.Data;class ModbusTcpSlaveExample
{private static ModbusSlave slave;private static TcpListener listener;private static bool isRunning = true;public static void Main(){Console.WriteLine("Modbus TCP从站示例");Console.WriteLine("按Ctrl+C停止服务");// 设置数据存储DataStore dataStore = DataStoreFactory.CreateDefaultDataStore();// 初始化一些测试数据dataStore.HoldingRegisters[0] = 1234;dataStore.HoldingRegisters[1] = 5678;dataStore.CoilDiscretes[0] = true;dataStore.CoilDiscretes[1] = false;// 创建TCP监听器listener = new TcpListener(IPAddress.Any, 502);listener.Start();// 创建Modbus从站slave = ModbusTcpSlave.CreateTcp(1, listener);slave.DataStore = dataStore;// 处理控制台中断Console.CancelKeyPress += (sender, e) => {isRunning = false;e.Cancel = true;};// 启动从站Console.WriteLine("从站已启动,等待请求...");slave.ListenAsync().GetAwaiter().GetResult();// 主循环while (isRunning){// 可以在这里更新数据存储或执行其他任务System.Threading.Thread.Sleep(100);}// 清理资源listener.Stop();Console.WriteLine("从站已停止");}
}
第五部分:实战项目 - Modbus数据监控系统
1. 项目需求
开发一个Modbus数据监控系统,具有以下功能:
- 支持Modbus TCP和RTU协议
- 可配置多个设备连接参数
- 实时监控设备数据
- 数据记录和历史趋势查看
- 异常报警功能
- 数据导出功能
2. 系统架构设计
ModbusMonitor
├── Core
│ ├── ModbusService (封装Modbus操作)
│ ├── DataRepository (数据存储)
│ └── AlarmService (报警管理)
├── Models
│ ├── DeviceConfig
│ ├── DataPoint
│ └── AlarmSetting
├── Services
│ ├── IModbusService
│ └── IDataLogger
└── UI (WPF或WinForms)
3. 核心代码实现
设备配置类:
public class DeviceConfig
{public string Name { get; set; }public byte SlaveId { get; set; }public ProtocolType Protocol { get; set; } // TCP, RTUpublic string ConnectionString { get; set; } // "127.0.0.1:502" 或 "COM3,9600,None,8,One"public List<DataPointConfig> DataPoints { get; set; } = new List<DataPointConfig>();
}public class DataPointConfig
{public string Name { get; set; }public PointType PointType { get; set; } // Coil, Input, HoldingRegister, etc.public ushort Address { get; set; }public DataType DataType { get; set; } // UInt16, Int32, Float, etc.public int Length { get; set; } = 1; // 对于数组类型public float ScalingFactor { get; set; } = 1.0f;public float Offset { get; set; } = 0.0f;public int PollingInterval { get; set; } = 1000; // ms
}
Modbus服务封装:
public interface IModbusService : IDisposable
{bool IsConnected { get; }Task<bool> ConnectAsync(DeviceConfig config);Task DisconnectAsync();Task<object> ReadDataPointAsync(DataPointConfig point);Task<bool> WriteDataPointAsync(DataPointConfig point, object value);event EventHandler<DataReceivedEventArgs> DataReceived;event EventHandler<ErrorEventArgs> ErrorOccurred;
}public class ModbusService : IModbusService
{private IModbusMaster _master;private DeviceConfig _currentConfig;private readonly ILogger _logger;public bool IsConnected => _master != null;public ModbusService(ILogger logger){_logger = logger;}public async Task<bool> ConnectAsync(DeviceConfig config){try{if (IsConnected)await DisconnectAsync();_currentConfig = config;switch (config.Protocol){case ProtocolType.TCP:var parts = config.ConnectionString.Split(':');string ip = parts[0];int port = parts.Length > 1 ? int.Parse(parts[1]) : 502;var tcpClient = new TcpClient();await tcpClient.ConnectAsync(ip, port);_master = ModbusIpMaster.CreateIp(tcpClient);break;case ProtocolType.RTU:var serialParams = config.ConnectionString.Split(',');string portName = serialParams[0];int baudRate = serialParams.Length > 1 ? int.Parse(serialParams[1]) : 9600;Parity parity = serialParams.Length > 2 ? (Parity)Enum.Parse(typeof(Parity), serialParams[2]) : Parity.None;int dataBits = serialParams.Length > 3 ? int.Parse(serialParams[3]) : 8;StopBits stopBits = serialParams.Length > 4 ? (StopBits)Enum.Parse(typeof(StopBits), serialParams[4]) : StopBits.One;var serialPort = new SerialPort(portName, baudRate, parity, dataBits, stopBits);serialPort.Open();_master = ModbusSerialMaster.CreateRtu(serialPort);break;}_master.Transport.ReadTimeout = 2000;_master.Transport.WriteTimeout = 2000;_logger.LogInformation($"成功连接到设备 {config.Name}");return true;}catch (Exception ex){_logger.LogError($"连接设备 {config.Name} 失败: {ex.Message}");return false;}}public async Task DisconnectAsync(){if (_master != null){try{if (_master is ModbusIpMaster ipMaster){ipMaster.Dispose();}else if (_master is ModbusSerialMaster serialMaster){serialMaster.Dispose();}_logger.LogInformation($"已断开与设备 {_currentConfig?.Name} 的连接");}catch (Exception ex){_logger.LogError($"断开连接时出错: {ex.Message}");}finally{_master = null;_currentConfig = null;}}}public async Task<object> ReadDataPointAsync(DataPointConfig point){if (!IsConnected)throw new InvalidOperationException("未连接到设备");try{object rawValue = null;object scaledValue = null;switch (point.PointType){case PointType.Coil:bool[] coils = await Task.Run(() => _master.ReadCoils(point.SlaveId, point.Address, (ushort)point.Length));rawValue = coils[0];scaledValue = (bool)rawValue;break;case PointType.HoldingRegister:ushort[] registers = await Task.Run(() => _master.ReadHoldingRegisters(point.SlaveId, point.Address, (ushort)point.Length));// 根据数据类型转换switch (point.DataType){case DataType.UInt16:rawValue = registers[0];scaledValue = (ushort)rawValue * point.ScalingFactor + point.Offset;break;case DataType.Int16:rawValue = (short)registers[0];scaledValue = (short)rawValue * point.ScalingFactor + point.Offset;break;case DataType.UInt32:rawValue = (uint)(registers[0] << 16 | registers[1]);scaledValue = (uint)rawValue * point.ScalingFactor + point.Offset;break;case DataType.Int32:rawValue = (int)(registers[0] << 16 | registers[1]);scaledValue = (int)rawValue * point.ScalingFactor + point.Offset;break;case DataType.Float:byte[] bytes = new byte[4];bytes[0] = (byte)(registers[0] >> 8);bytes[1] = (byte)registers[0];bytes[2] = (byte)(registers[1] >> 8);bytes[3] = (byte)registers[1];rawValue = BitConverter.ToSingle(bytes, 0);scaledValue = (float)rawValue * point.ScalingFactor + point.Offset;break;}break;// 其他数据类型处理...}// 触发数据接收事件DataReceived?.Invoke(this, new DataReceivedEventArgs{Point = point,RawValue = rawValue,ScaledValue = scaledValue,Timestamp = DateTime.Now});return scaledValue;}catch (Exception ex){_logger.LogError($"读取数据点 {point.Name} 失败: {ex.Message}");ErrorOccurred?.Invoke(this, new ErrorEventArgs(ex));throw;}}// 其他方法实现...
}
数据轮询服务:
public class DataPollingService
{private readonly IModbusService _modbusService;private readonly IDataRepository _repository;private readonly ILogger _logger;private readonly Dictionary<DataPointConfig, Timer> _pollingTimers = new Dictionary<DataPointConfig, Timer>();public DataPollingService(IModbusService modbusService, IDataRepository repository, ILogger logger){_modbusService = modbusService;_repository = repository;_logger = logger;_modbusService.DataReceived += OnDataReceived;_modbusService.ErrorOccurred += OnErrorOccurred;}public void StartPolling(DeviceConfig device){foreach (var point in device.DataPoints){var timer = new Timer(point.PollingInterval);timer.Elapsed += async (sender, e) => {try{await _modbusService.ReadDataPointAsync(point);}catch (Exception ex){_logger.LogError($"轮询数据点 {point.Name} 时出错: {ex.Message}");}};timer.AutoReset = true;timer.Enabled = true;_pollingTimers[point] = timer;}}public void StopPolling(){foreach (var timer in _pollingTimers.Values){timer.Stop();timer.Dispose();}_pollingTimers.Clear();}private void OnDataReceived(object sender, DataReceivedEventArgs e){// 存储数据到数据库_repository.SaveDataPoint(e.Point, e.RawValue, e.ScaledValue, e.Timestamp);// 检查报警条件CheckAlarmConditions(e.Point, e.ScaledValue);}private void OnErrorOccurred(object sender, ErrorEventArgs e){_logger.LogError($"Modbus错误: {e.Error.Message}");// 可以在这里实现重连逻辑}private void CheckAlarmConditions(DataPointConfig point, object value){// 实现报警检查逻辑// 如果value超过设定的阈值,触发报警}
}
第六部分:性能优化与最佳实践
1. Modbus通信优化技巧
- 批量读取:尽可能使用批量读取功能(如读多个寄存器)而不是单个读取
- 合理设置轮询间隔:根据数据变化频率设置适当的轮询间隔
- 连接池:对于频繁连接/断开的场景,实现连接池管理
- 异步操作:使用异步方法避免阻塞UI线程
- 错误重试机制:实现智能重试逻辑,避免网络抖动导致的问题
2. 错误处理与恢复
public async Task<object> RobustReadDataPoint(DataPointConfig point, int maxRetries = 3)
{int retryCount = 0;Exception lastError = null;while (retryCount < maxRetries){try{return await _modbusService.ReadDataPointAsync(point);}catch (IOException ex){lastError = ex;_logger.LogWarning($"IO异常,尝试重新连接 (尝试 {retryCount + 1}/{maxRetries})");await Reconnect();}catch (SlaveException ex){lastError = ex;_logger.LogError($"从站异常: {ex.Message}");break; // Modbus协议错误通常不需要重试}catch (Exception ex){lastError = ex;_logger.LogWarning($"读取失败,重试中 (尝试 {retryCount + 1}/{maxRetries}): {ex.Message}");}retryCount++;await Task.Delay(1000 * retryCount); // 指数退避}throw new Exception($"读取数据点 {point.Name} 失败,达到最大重试次数", lastError);
}private async Task Reconnect()
{try{await _modbusService.DisconnectAsync();await Task.Delay(1000);await _modbusService.ConnectAsync(_currentConfig);}catch (Exception ex){_logger.LogError($"重新连接失败: {ex.Message}");throw;}
}
3. 线程安全考虑
Modbus通信通常涉及多线程操作,需要注意:
- 串口通信的线程安全:System.IO.Ports.SerialPort不是线程安全的
- 共享资源访问:使用锁或其他同步机制保护共享状态
- UI更新:使用Invoke或Dispatcher在UI线程上更新界面
// 线程安全的Modbus操作包装器
public class ThreadSafeModbusMaster
{private readonly IModbusMaster _master;private readonly object _lock = new object();public ThreadSafeModbusMaster(IModbusMaster master){_master = master;}public ushort[] ReadHoldingRegisters(byte slaveAddress, ushort startAddress, ushort numberOfPoints){lock (_lock){return _master.ReadHoldingRegisters(slaveAddress, startAddress, numberOfPoints);}}// 包装其他需要的方法...
}
4. 日志记录与诊断
完善的日志记录对于Modbus应用至关重要:
public class ModbusLogger : ILogger
{private readonly string _logFilePath;public ModbusLogger(string logFilePath){_logFilePath = logFilePath;}public void LogInformation(string message){Log("INFO", message);}public void LogWarning(string message){Log("WARN", message);}public void LogError(string message){Log("ERROR", message);}public void LogDebug(string message){Log("DEBUG", message);}private void Log(string level, string message){string logEntry = $"{DateTime.Now:yyyy-MM-dd HH:mm:ss.fff} [{level}] {message}";// 控制台输出Console.WriteLine(logEntry);// 文件记录try{File.AppendAllText(_logFilePath, logEntry + Environment.NewLine);}catch (Exception ex){Console.WriteLine($"无法写入日志文件: {ex.Message}");}}// 可以添加Modbus特定的日志方法,如记录原始帧数据public void LogFrame(byte[] frame, bool isRequest){string direction = isRequest ? "TX" : "RX";string hex = BitConverter.ToString(frame).Replace("-", " ");LogDebug($"{direction} Frame: {hex}");}
}
第七部分:高级主题与扩展
1. Modbus与OPC UA集成
现代工业系统中,Modbus常与OPC UA一起使用:
// 示例:将Modbus数据发布为OPC UA节点
public class ModbusOpcUaPublisher
{private readonly IModbusService _modbusService;private readonly ApplicationConfiguration _opcConfig;private ApplicationInstance _application;public ModbusOpcUaPublisher(IModbusService modbusService, string opcServerUri){_modbusService = modbusService;// 配置OPC UA应用_opcConfig = new ApplicationConfiguration{ApplicationName = "Modbus OPC UA Server",ApplicationUri = opcServerUri,ApplicationType = ApplicationType.Server,ServerConfiguration = new ServerConfiguration{BaseAddresses = { $"opc.tcp://localhost:62541/ModbusServer" },SecurityPolicies = new ServerSecurityPolicyCollection(),UserTokenPolicies = new UserTokenPolicyCollection()},SecurityConfiguration = new SecurityConfiguration(),TransportConfigurations = new TransportConfigurationCollection(),TransportQuotas = new TransportQuotas { OperationTimeout = 10000 },ClientConfiguration = new ClientConfiguration()};_application = new ApplicationInstance(_opcConfig);}public async Task StartAsync(){// 初始化OPC UA服务器await _application.CheckApplicationInstanceCertificate(false, 0);var server = new StandardServer();await _application.Start(server);// 创建地址空间var namespaceManager = new NamespaceManager(server.DefaultNamespace);var objectsFolder = namespaceManager.GetObjectsFolder();// 添加Modbus数据点foreach (var point in _modbusService.GetDataPoints()){var variable = new DataVariableState(objectsFolder);variable.NodeId = new NodeId(point.Name, namespaceManager.DefaultNamespaceIndex);variable.BrowseName = new QualifiedName(point.Name);variable.DisplayName = new LocalizedText(point.Name);variable.DataType = GetOpcDataType(point.DataType);variable.ValueRank = ValueRank.Scalar;variable.AccessLevel = AccessLevels.CurrentRead;variable.UserAccessLevel = AccessLevels.CurrentRead;variable.Historizing = false;// 添加节点objectsFolder.AddChild(variable);// 设置值更新回调_modbusService.DataReceived += (sender, e) =>{if (e.Point.Name == point.Name){variable.Value = e.ScaledValue;variable.Timestamp = DateTime.Now;variable.ClearChangeMasks(server.SystemContext, false);}};}}private NodeId GetOpcDataType(DataType dataType){switch (dataType){case DataType.Boolean: return DataTypeIds.Boolean;case DataType.Int16: return DataTypeIds.Int16;case DataType.UInt16: return DataTypeIds.UInt16;case DataType.Int32: return DataTypeIds.Int32;case DataType.UInt32: return DataTypeIds.UInt32;case DataType.Float: return DataTypeIds.Float;default: return DataTypeIds.BaseDataType;}}
}
2. Modbus网关实现
Modbus网关可以在不同协议间转换数据:
public class ModbusGateway
{private readonly IModbusMaster _sourceMaster;private readonly IModbusSlave _targetSlave;private readonly List<PointMapping> _mappings;private readonly Timer _pollingTimer;public ModbusGateway(IModbusMaster sourceMaster, IModbusSlave targetSlave, List<PointMapping> mappings, int pollingInterval = 1000){_sourceMaster = sourceMaster;_targetSlave = targetSlave;_mappings = mappings;_pollingTimer = new Timer(pollingInterval);_pollingTimer.Elapsed += async (s, e) => await PollAndUpdate();}public void Start(){_pollingTimer.Start();}public void Stop(){_pollingTimer.Stop();}private async Task PollAndUpdate(){foreach (var mapping in _mappings){try{object value = await ReadFromSource(mapping.Source);await WriteToTarget(mapping.Target, value);}catch (Exception ex){// 处理错误}}}private async Task<object> ReadFromSource(PointAddress source){switch (source.PointType){case PointType.Coil:bool[] coils = await Task.Run(() => _sourceMaster.ReadCoils(source.SlaveId, source.Address, 1));return coils[0];case PointType.HoldingRegister:ushort[] registers = await Task.Run(() => _sourceMaster.ReadHoldingRegisters(source.SlaveId, source.Address, 1));return registers[0];// 其他类型...default:throw new NotSupportedException($"不支持的源点类型: {source.PointType}");}}private async Task WriteToTarget(PointAddress target, object value){switch (target.PointType){case PointType.Coil:bool coilValue = (bool)value;await Task.Run(() => _targetSlave.DataStore.CoilDiscretes[target.Address] = coilValue);break;case PointType.HoldingRegister:ushort registerValue = Convert.ToUInt16(value);await Task.Run(() => _targetSlave.DataStore.HoldingRegisters[target.Address] = registerValue);break;// 其他类型...default:throw new NotSupportedException($"不支持的目标点类型: {target.PointType}");}}
}public class PointMapping
{public PointAddress Source { get; set; }public PointAddress Target { get; set; }
}public class PointAddress
{public byte SlaveId { get; set; }public PointType PointType { get; set; }public ushort Address { get; set; }
}
3. Modbus安全考虑
虽然传统Modbus缺乏内置安全机制,但我们可以实现一些保护措施:
- 网络隔离:将Modbus设备放在独立网络
- VPN隧道:通过VPN访问远程Modbus设备
- 防火墙规则:限制访问Modbus端口的IP
- 协议包装:将Modbus封装在加密通道中
// 示例:使用TLS包装Modbus TCP
public class SecureModbusTcpMaster : IModbusMaster
{private readonly SslStream _sslStream;private readonly ModbusIpMaster _innerMaster;public SecureModbusTcpMaster(string host, int port, string serverCertName){var tcpClient = new TcpClient(host, port);_sslStream = new SslStream(tcpClient.GetStream(), false, (sender, certificate, chain, errors) => {if (errors != SslPolicyErrors.None)return false;var serverCertificate = (X509Certificate2)certificate;return serverCertificate.GetNameInfo(X509NameType.SimpleName, false) == serverCertName;});_sslStream.AuthenticateAsClient(serverCertName);_innerMaster = ModbusIpMaster.CreateIp(_sslStream);}// 实现IModbusMaster接口,委托给_innerMasterpublic ushort[] ReadHoldingRegisters(byte slaveAddress, ushort startAddress, ushort numberOfPoints){return _innerMaster.ReadHoldingRegisters(slaveAddress, startAddress, numberOfPoints);}// 其他方法...public void Dispose(){_innerMaster?.Dispose();_sslStream?.Dispose();}
}
第八部分:常见问题与解决方案
1. Modbus通信常见问题
问题1:无响应或超时
- 检查物理连接(电缆、端口)
- 确认从站地址正确
- 验证波特率、奇偶校验等串口设置
- 检查从站是否处于正常工作状态
问题2:CRC校验错误
- 检查电缆长度是否符合规范(RS-485最长1200米)
- 检查终端电阻是否适当(RS-485需要120Ω终端电阻)
- 验证CRC计算是否正确
问题3:非法数据地址错误
- 确认从站设备支持的地址范围
- 检查地址偏移(有些设备使用基于0的地址,有些使用基于1的地址)
问题4:响应延迟
- 减少单个请求的数据量
- 增加主站超时设置
- 检查网络负载或串口冲突
2. 调试技巧
-
使用Modbus嗅探工具:
- Modbus Poll (商业)
- QModMaster (开源)
- Simply Modbus (免费版可用)
-
记录原始帧数据:
public class ModbusFrameLogger
{private readonly Stream _stream;private readonly ILogger _logger;public ModbusFrameLogger(Stream stream, ILogger logger){_stream = stream;_logger = logger;}public async Task<byte[]> ReadFrameAsync(){byte[] buffer = new byte[256];int bytesRead = await _stream.ReadAsync(buffer, 0, buffer.Length);if (bytesRead > 0){byte[] frame = new byte[bytesRead];Array.Copy(buffer, frame, bytesRead);_logger.LogDebug($"RX: {BitConverter.ToString(frame)}");return frame;}return null;}public async Task WriteFrameAsync(byte[] frame){_logger.LogDebug($"TX: {BitConverter.ToString(frame)}");await _stream.WriteAsync(frame, 0, frame.Length);}
}
- 模拟从站设备:
使用Modbus Slave等工具模拟从站设备进行测试
3. 性能调优
- 批量读取优化:
// 不好的做法 - 单独读取每个寄存器
for (ushort i = 0; i < 10; i++)
{ushort[] value = master.ReadHoldingRegisters(slaveId, i, 1);// 处理value
}// 好的做法 - 批量读取
ushort[] values = master.ReadHoldingRegisters(slaveId, 0, 10);
for (ushort i = 0; i < values.Length; i++)
{// 处理values[i]
}
- 并行请求:
public async Task<Dictionary<string, object>> ReadMultiplePointsAsync(List<DataPointConfig> points, int batchSize = 10)
{var results = new Dictionary<string, object>();var tasks = new List<Task>();// 按从站地址分组var groups = points.GroupBy(p => p.SlaveId);foreach (var group in groups){// 按批量大小分块var chunks = group.Batch(batchSize);foreach (var chunk in chunks){// 为每个块创建并行任务var chunkTasks = chunk.Select(async point => {try{object value = await ReadDataPointAsync(point);lock (results){results[point.Name] = value;}}catch (Exception ex){// 处理错误}});tasks.AddRange(chunkTasks);}}await Task.WhenAll(tasks);return results;
}
- 缓存策略:
public class ModbusDataCache
{private readonly ConcurrentDictionary<string, CacheItem> _cache;private readonly TimeSpan _defaultExpiration;public ModbusDataCache(TimeSpan defaultExpiration){_cache = new ConcurrentDictionary<string, CacheItem>();_defaultExpiration = defaultExpiration;}public async Task<object> GetOrAddAsync(string key, Func<Task<object>> valueFactory, TimeSpan? expiration = null){if (_cache.TryGetValue(key, out var item) && !item.IsExpired){return item.Value;}object value = await valueFactory();var newItem = new CacheItem(value, expiration ?? _defaultExpiration);_cache.AddOrUpdate(key, newItem, (k, oldItem) => newItem);return value;}private class CacheItem{public object Value { get; }public DateTimeOffset Expiration { get; }public bool IsExpired => DateTimeOffset.Now >= Expiration;public CacheItem(object value, TimeSpan lifetime){Value = value;Expiration = DateTimeOffset.Now.Add(lifetime);}}
}
第九部分:Modbus开发资源与工具
1. 开发资源
-
官方文档:
- Modbus协议规范:https://modbus.org/specs.php
- Modbus over Serial Line 规范
- Modbus TCP/IP 规范
-
开源库:
- NModbus:https://github.com/NModbus/NModbus
- EasyModbusTCP:https://github.com/rossmann-engineering/EasyModbusTCP.NET
-
测试工具:
- Modbus Poll (商业)
- QModMaster (开源)
- Simply Modbus (免费版)
2. 硬件设备
-
Modbus RTU设备:
- RS-485转USB适配器
- 工业Modbus RTU设备(PLC、传感器等)
-
Modbus TCP设备:
- 支持Modbus TCP的PLC
- 以太网转Modbus RTU网关
-
开发板:
- Raspberry Pi + RS-485 HAT
- Arduino + Modbus库
3. 学习资源
-
书籍:
- 《Modbus软件开发实战指南》
- 《工业通信协议与应用》
-
在线课程:
- Udemy工业通信协议课程
- Coursera工业物联网专项课程
-
社区:
- Stack Overflow (Modbus标签)
- GitHub相关项目社区
- 工业自动化论坛
第十部分:总结与展望
1. Modbus协议的优势与局限
优势:
- 简单易实现
- 广泛支持,几乎所有的PLC和HMI都支持Modbus
- 资源消耗低,适合嵌入式设备
- 开放性,无需授权费用
局限:
- 缺乏现代安全机制
- 数据传输效率相对较低
- 没有标准化的设备描述方式
- 功能相对简单,不支持复杂数据结构
2. Modbus的未来发展
尽管Modbus已有40多年历史,但它仍在工业领域广泛使用。未来的发展趋势包括:
- Modbus over TLS:为Modbus TCP添加安全层
- 与IIoT集成:Modbus网关连接到云平台
- 性能优化:基于现代网络的改进版本
- 与OPC UA融合:作为OPC UA的底层传输协议
3. 选择Modbus的建议
适合使用Modbus的场景:
- 连接传统工业设备
- 资源受限的嵌入式系统
- 简单的监控和数据采集系统
- 需要快速实现的工业通信解决方案
不适合的场景:
- 需要高安全性的关键系统
- 大数据量、高频率的数据传输
- 复杂的控制逻辑和数据结构
- 需要丰富元数据的现代IIoT应用
4. 结束语
Modbus作为一种简单可靠的工业通信协议,仍然是工业自动化领域的重要组成部分。通过本指南,您应该已经掌握了使用C#进行Modbus开发的核心知识和技能。无论是连接传统设备还是开发现代工业应用,Modbus都是一个值得掌握的协议。
随着工业物联网(IIoT)的发展,Modbus可能会逐渐被更现代的协议所补充或替代,但由于其简单性和广泛部署,Modbus仍将在未来许多年继续发挥重要作用。掌握Modbus开发不仅有助于解决当前的工业通信需求,也为理解更复杂的工业协议奠定了基础。