协议转换利器,profinet转ethercat网关的两大派系,各有千秋
随着工业以太网的发展,其高效、便捷、协议开放、易于冗余等诸多优点,被越来越多的工业现场所采用。西门子SIMATIC S7-1200/1500系列PLC集成有Profinet接口,具有实时性、开放性,使用TCP/IP和IT标准,符合基于工业以太网的实时自动化体系,能够满足从现场层到管理层的所有应用需求,真正的实现一网到底的革命。现以2台S7-1200PLC的,通过稳联技术的profinet转ethercat以太网通讯为例,具体的组态方法分享交流
EtherCAT 虽然没有profinet老牌,但它的优点更适应现代工业生产线,
Ethercat超高性能与低延迟,“飞驰”帧技术:数据帧在设备间实时处理(每个节点仅微秒级延迟),总响应时间极短(典型<100μs)。ethercat协议无需交换机,数据帧直接透传,减少硬件成本,协议效率>90%(传统以太网仅30-40%)
西门子SIMATIC S7-1200/1500系列PLC集成有Profinet接口,具有实时性、开放性,使用TCP/IP和IT标准,符合基于工业以太网的实时自动化体系,能够满足从现场层到管理层的所有应用需求,真正的实现一网到底的革命。现以2台S7-1200PLC的以太网通讯为例,具体的组态方法分享交流
一、 设备组态
1. 软件:西门子博途v17
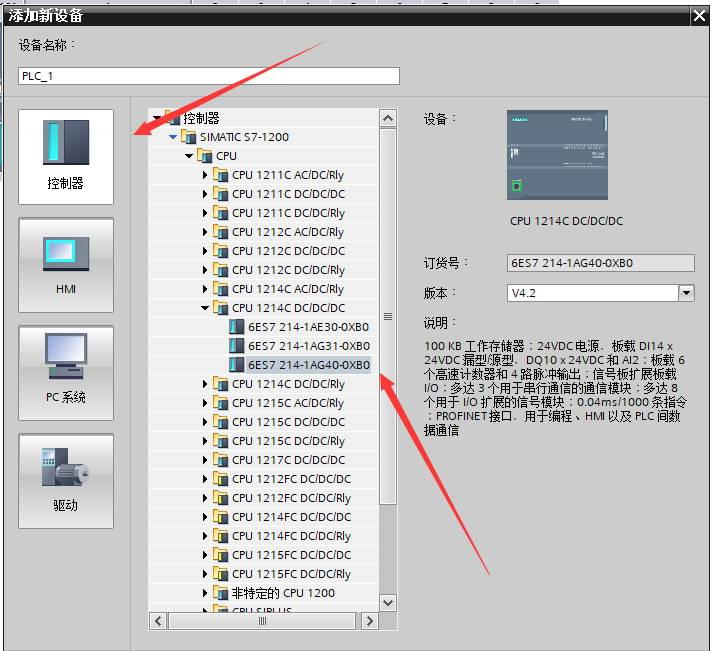
2. 硬件组态:两台S7-1200系列PLC
添加PLC_1,重命名为主站,添加PLC_2,,重命名为从站。
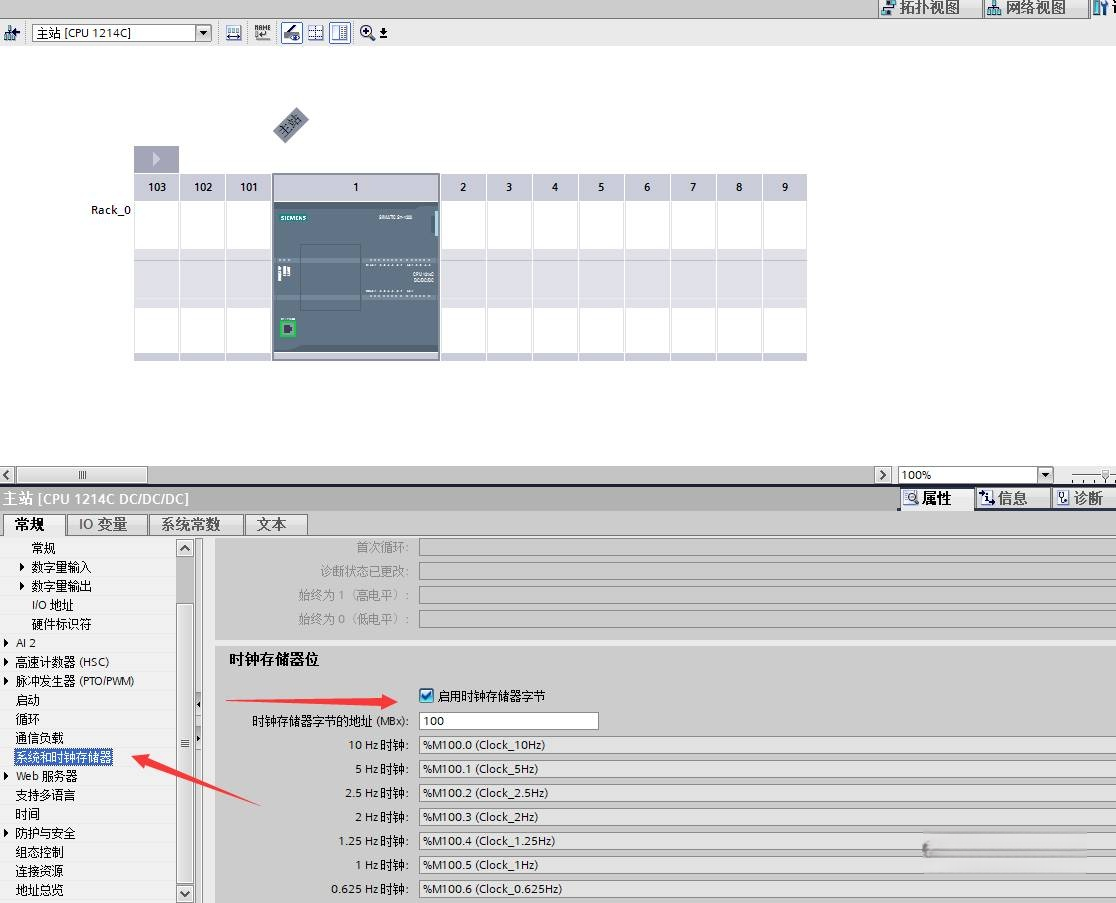
打开主站PLC_1组态,启用时钟存储器字节
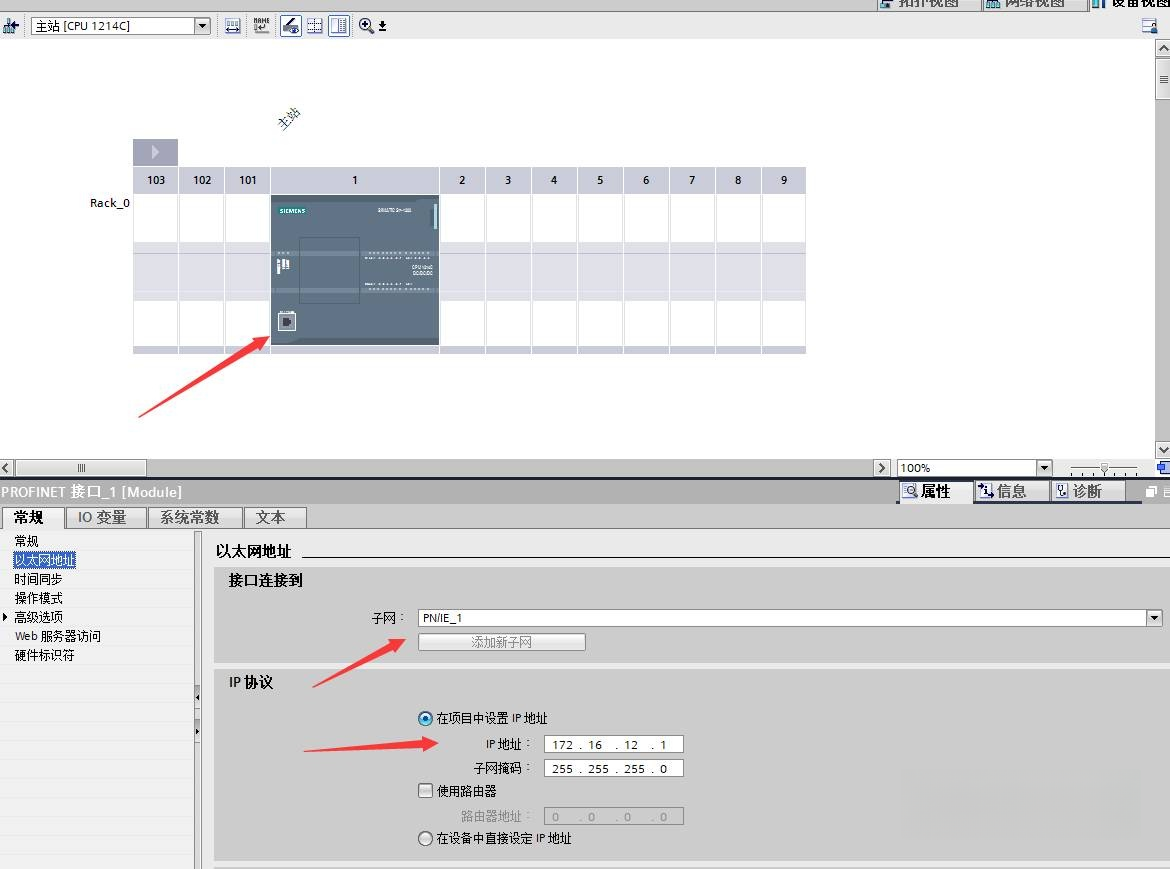
双击主站PLC_1以太网口,新建网络PNIE_1,设定IP地址为192.168.0.1
打开从站PLC_2组态,启用时钟存储器字节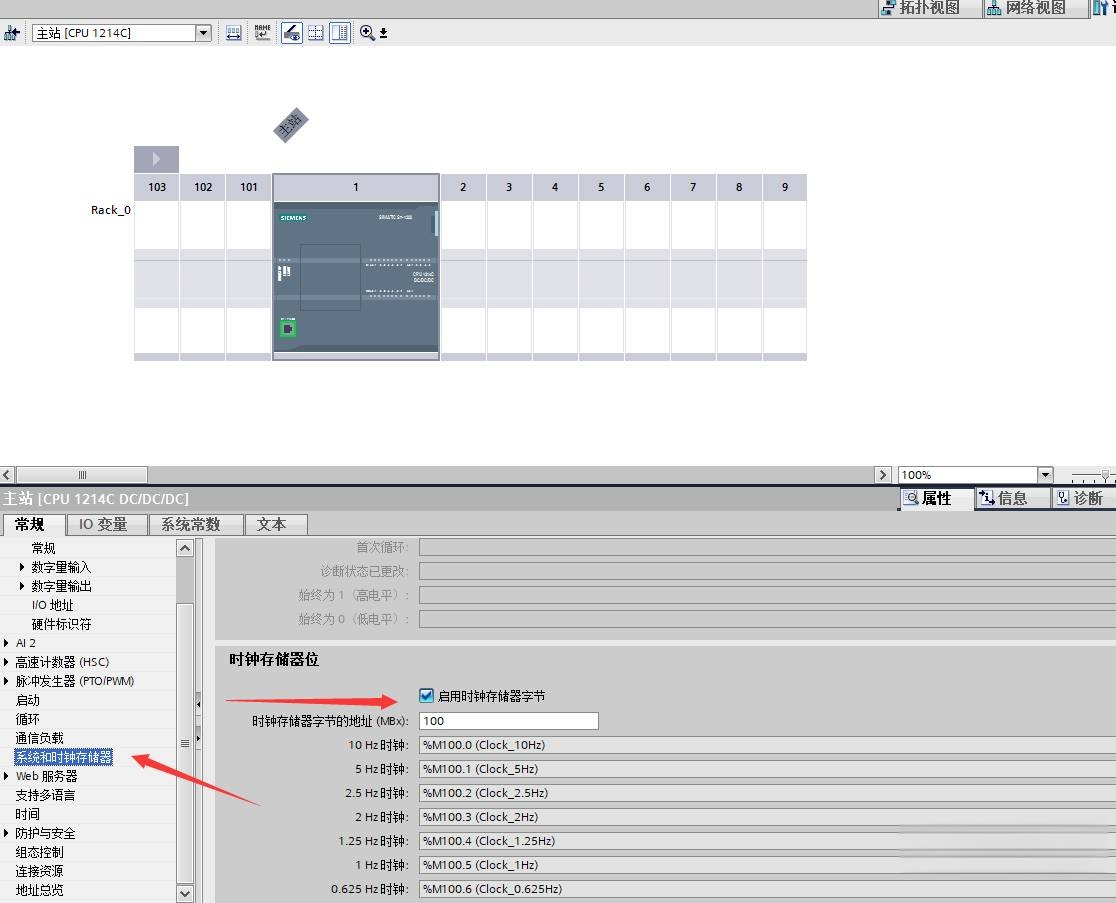
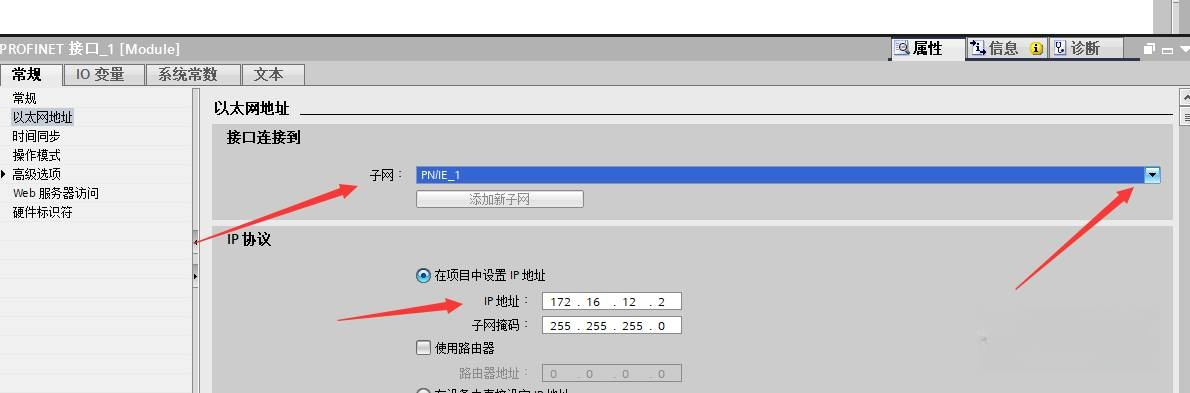
双击从站PLC_2以太网口,选择PLC_1已建立的PNIE_1网络,设定IP地址为192.168.0.2
网络视图显示两台PLC已连接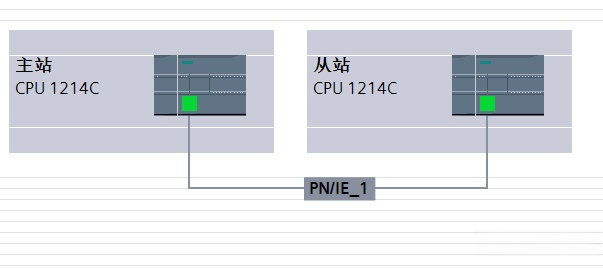
网络组态完毕,下面开始写程序。
3. 程序编写
(1). 主站发送,从站读取数据
打开主站程序块中Main(OB1)主程序块,选择“通讯”指令中的“开放式用户通信”子选项,调用“TSEND_C”(通过以太网发送数据)指令: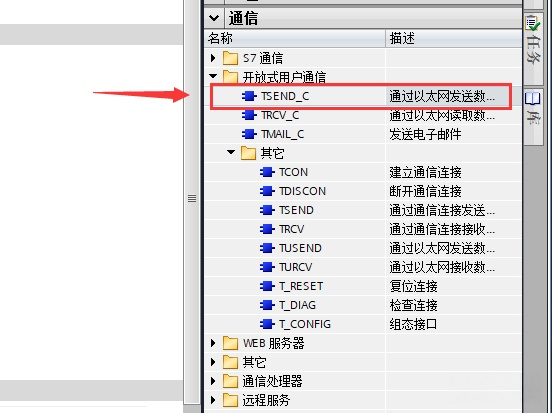
自动生成背景DB块,点击确定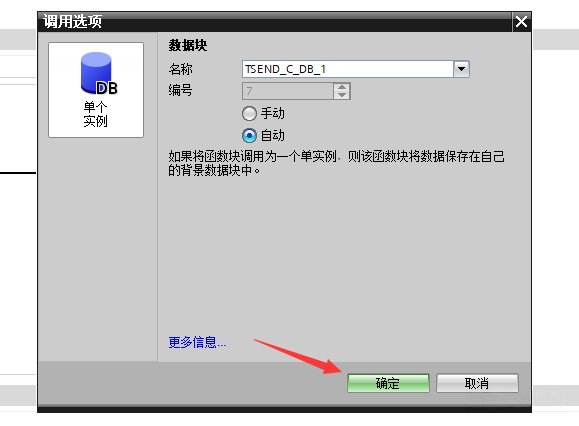
组态主站发送程序块:
点击程序块上的“开始组态”按钮,首先组态连接参数,选择通讯伙伴为从站PLC_2,连接类型为TCP,连接ID主站从站均为1.,主站从站分别新建“连接数据”主站选中“主动建立连接”,其他设置默认。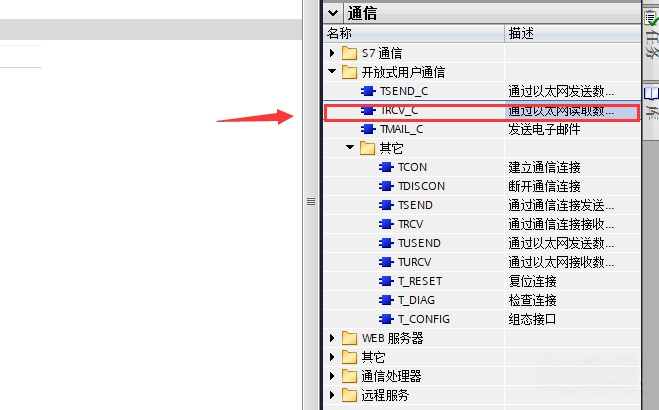
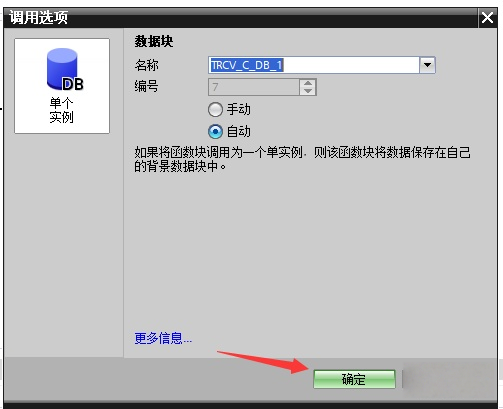
打开从站MAIN(OB1)程序块,选择“通讯”指令中的“开放式用户通信”子选项,调用“TRCV_C”(通过以太网读取数据)指令:
自动生成背景DB块,点击确定