ROS_Noetic的安装
首先请观看Ubuntu20.04的安装本ROS系统需要Ubuntu20.04的系统支持。
具体安装见Ubuntu20.04的安装(VMware)-CSDN博客
1.ROS安装
见下图

确保如下四个都是打开的
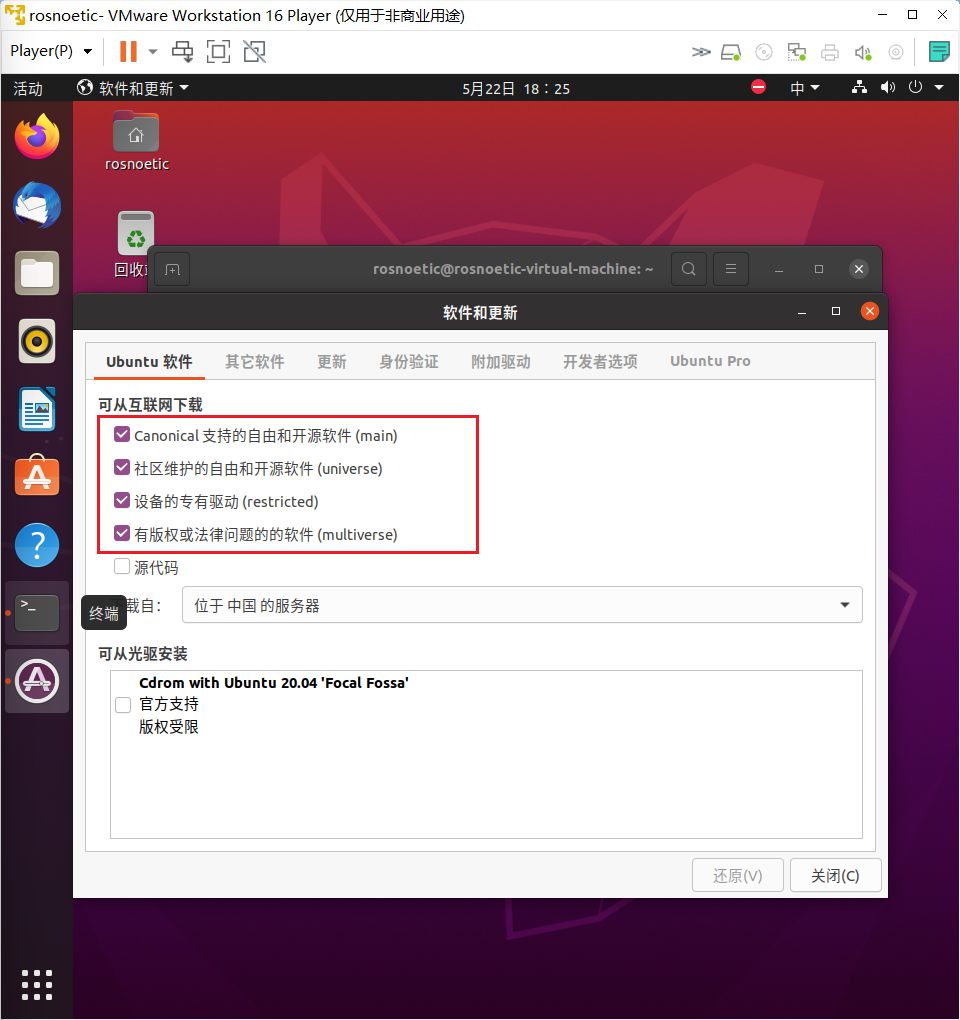
为确保ros配置错误较少这里推荐使用官方源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'将上述代码直接粘贴就行,如果下载错误,建议多次下载。
配置key(将下面代码直接粘贴)
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654更新软件
sudo apt update安装ros
sudo apt install ros-noetic-desktop-full配置环境变量
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc安装相关依赖
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential初始化rosdep
sudo rosdep init
rosdep update上述文章大部分涉及到外国文件,建议打开魔法
2.ros测试使用
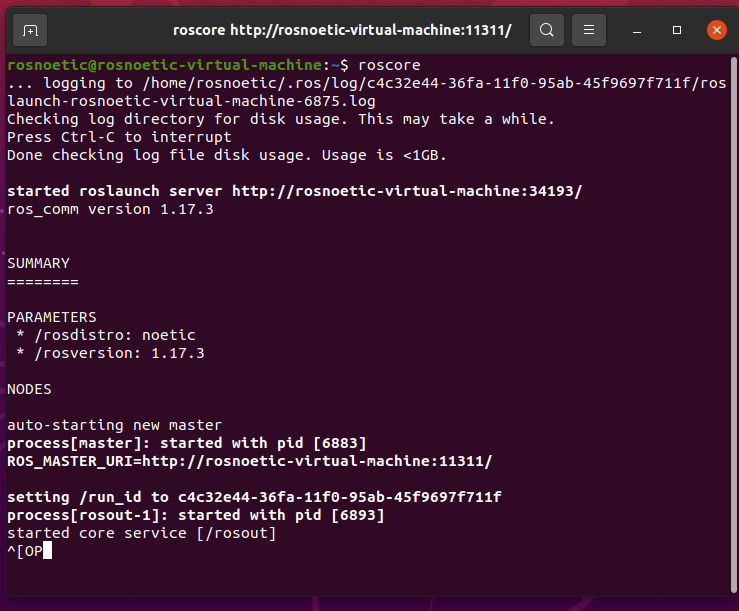
首先打开三个窗口
第一个输入roscore
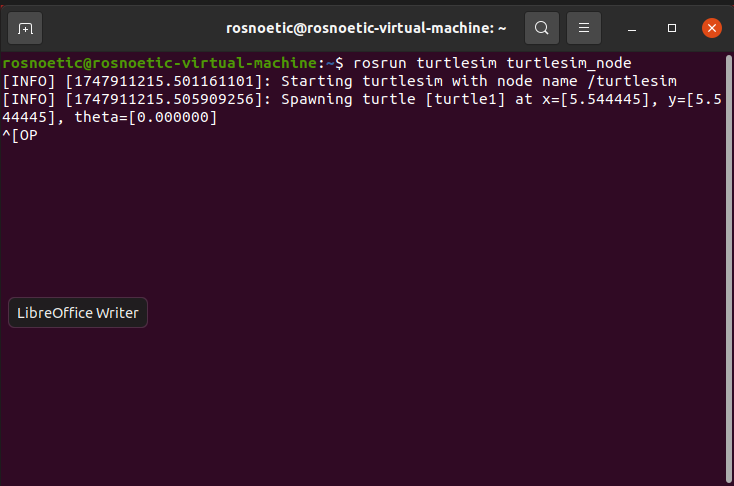
第二个窗口输入rosrun turtlesim turtlesim_node
第三个输入 rosrun turtlesim turtle_teleop_key
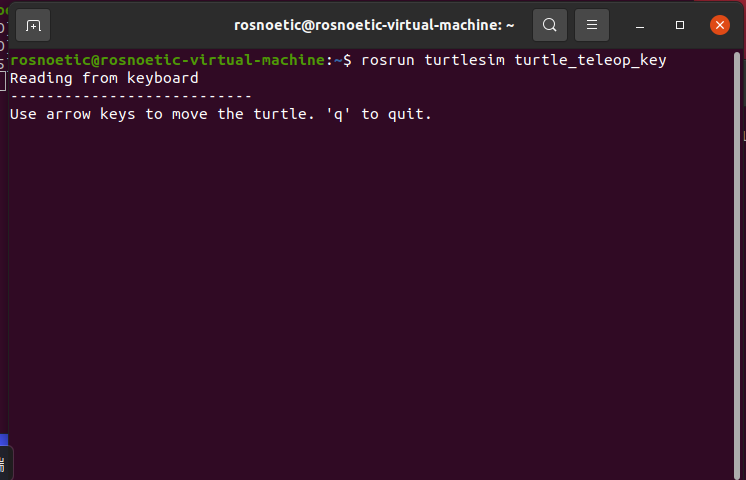
然后将鼠标聚焦到第三个窗口尝试用键盘控制第二个窗口的乌龟移动即算成功安装。