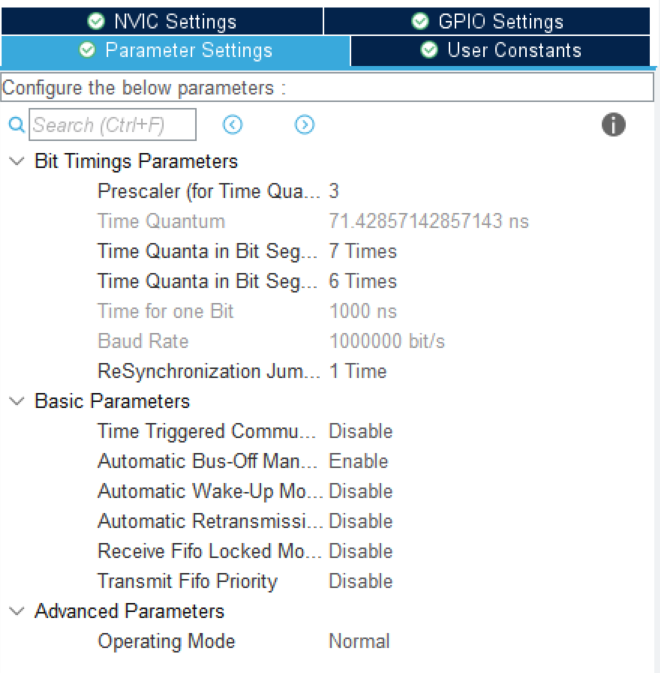
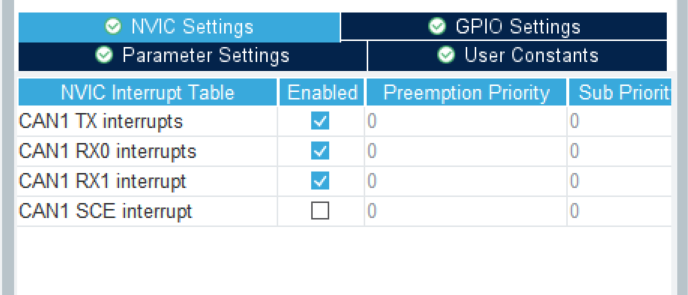
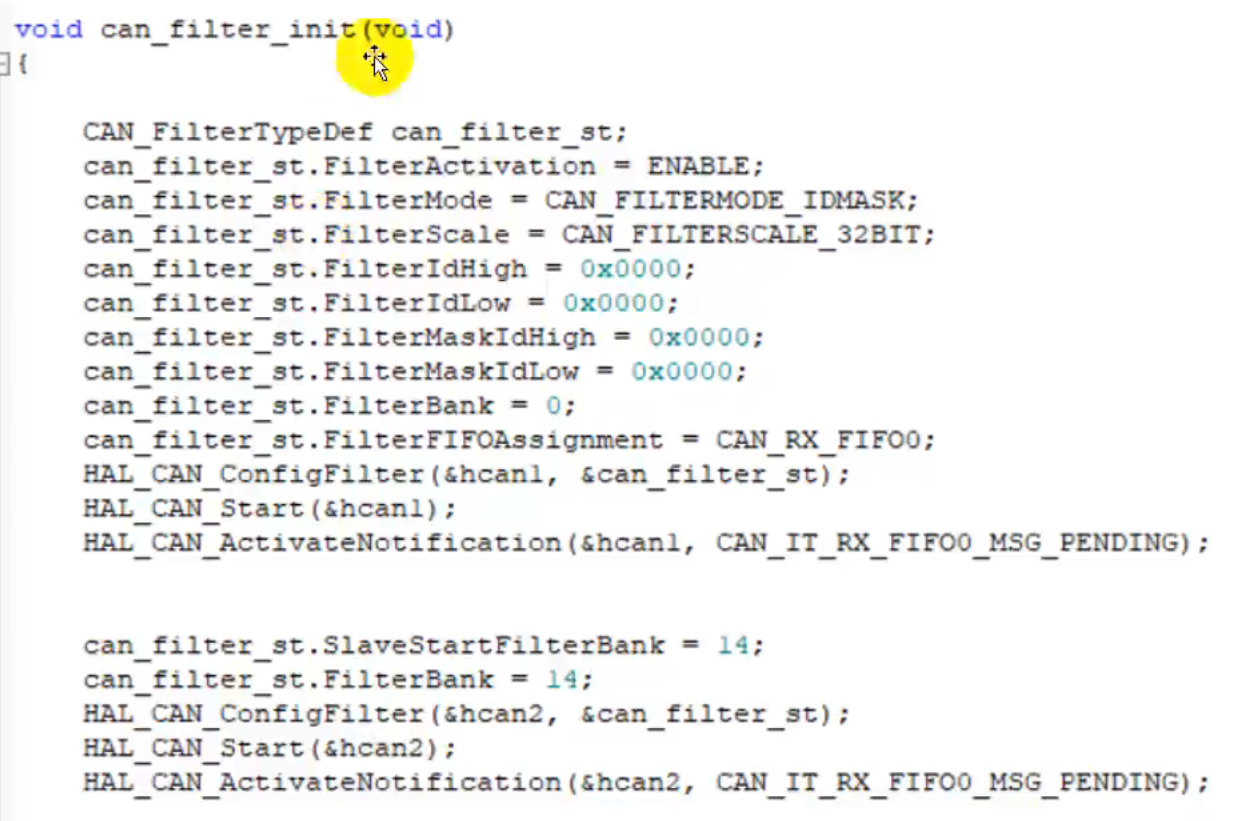
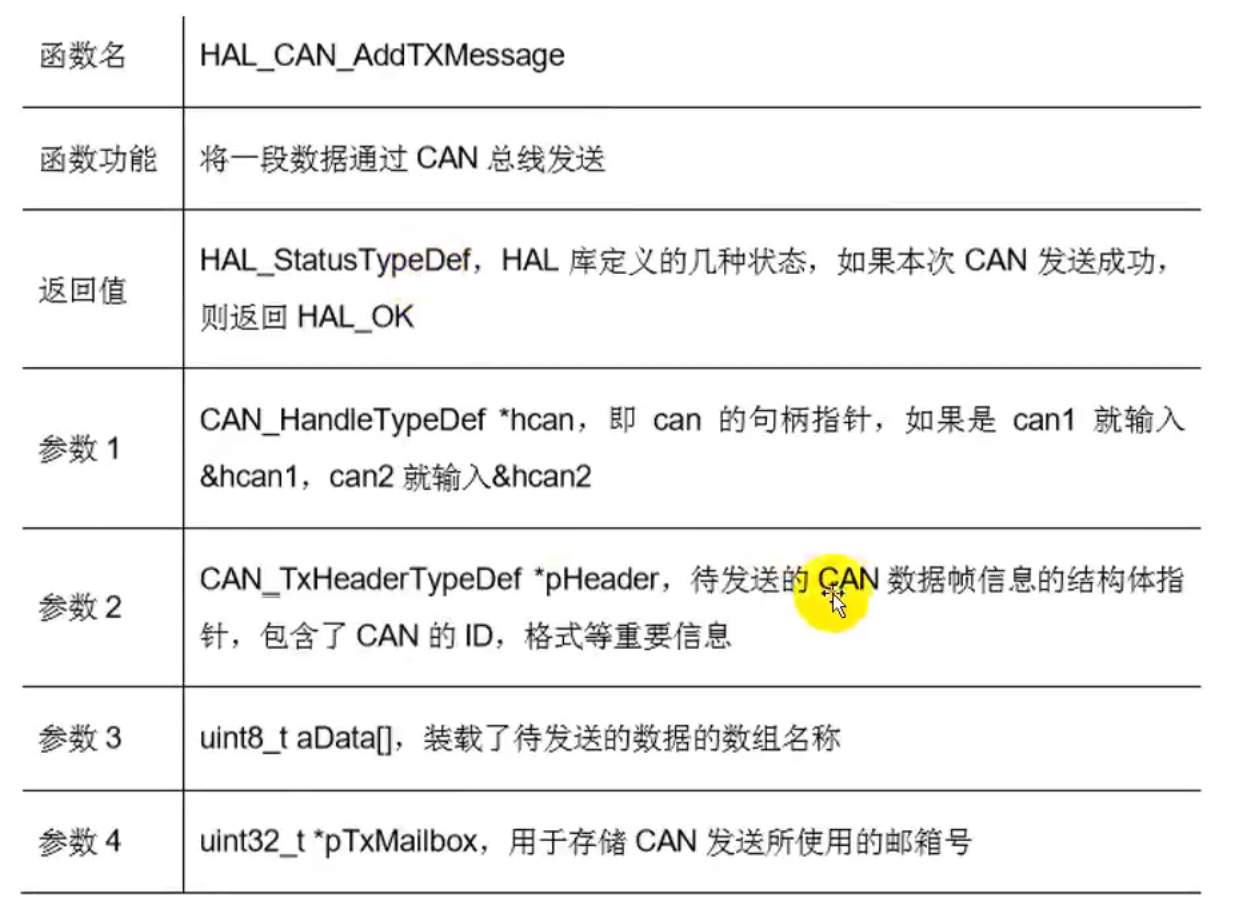
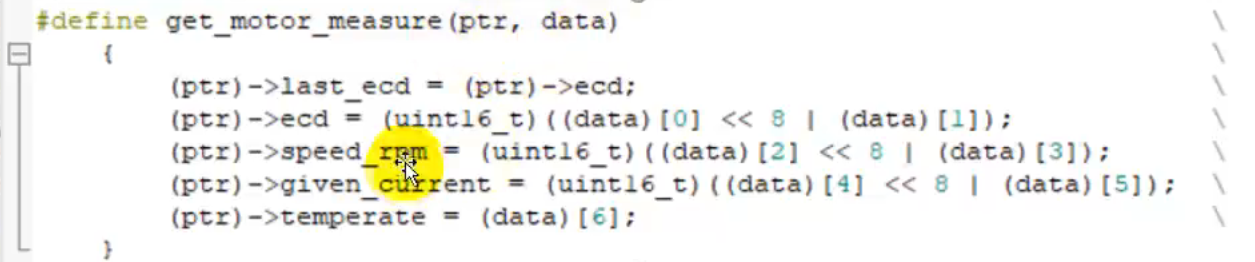
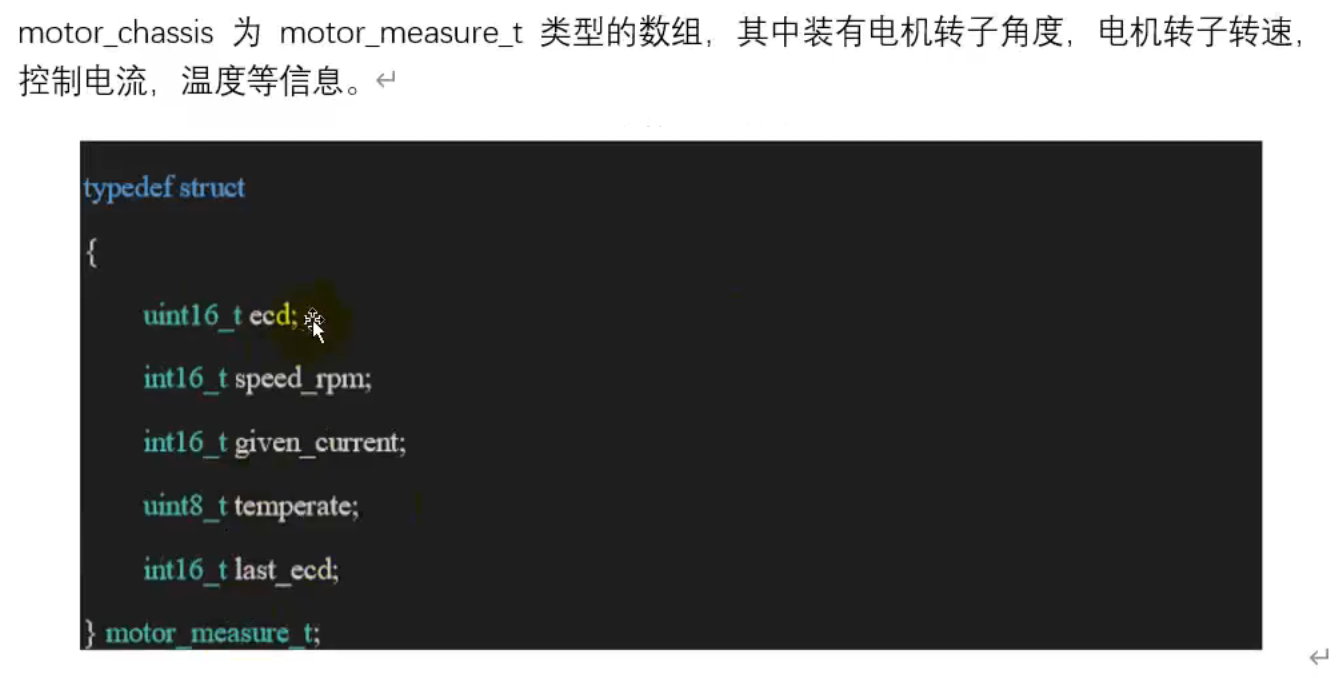
当前位置: 首页 > web >正文 robomaster机甲大师--电调电机 web 2025/8/29 22:38:24 文章目录 C620电调ID设置速率 电调发送报文电调接收报文cubemx程序初始化发送接收 C620电调 ID设置 速率 1Mbps 电调发送报文 发送的数据为控制电机的输出电流,需要将can数据帧的ID设置为0x200 电调接收报文 机械角度:电机的0到360度映射到0到几千转速:rpm,转每分 cubemx 程序 初始化 直接用 当前过滤器配置中,将过滤标识符(FilterIdHigh、FilterIdLow )和屏蔽标识符(FilterMaskIdHigh、FilterMaskIdLow )都设置为0x0000 ,意味着接收所有 CAN 消息 发送 接收 查看全文 http://www.xdnf.cn/news/5542.html 相关文章: C++入门篇——类和对象(下) C/C++表驱动法 Kubernetes生产实战(二十):容器大镜像拉取优化指南 8.二叉树减枝 双流 JOIN 与维表 JOIN 的区别 多线程与信号 软件设计师-错题笔记-软件工程基础知识 总结C/C++中程序内存区域划分 判断公网IP办法 Java SolonMCP 实现 MCP 实践全解析:SSE 与 STDIO 通信模式详解 Kubernetes排错(十三):Pod间偶发超时问题排查 期刊 | 《电讯技术》 [SAP] SAP ERP用户参数设置 Funplus 服务端开发实习 面经 分享一些资料供大家学习 PCB 设计 | 1A / 10A / 100A 41、IIS 应⽤程序池集成模式和经典模式的区别? 点和体素哪个好 损失函数的选择和技术分析:深度学习模型训练的指南 GO语言-导入自定义包 嵌入式STM32学习——振动传感器控制继电器开关灯 力扣-二叉树-101 对称二叉树 fast-livo2原理 【Java学习笔记】属性重写问题 全栈项目实战:Vue3+Node.js开发博客系统 Python-MCPAgent开发-DeepSeek版本 MySQL索引原理以及SQL优化(二) 【更新至2023年】1999-2023年上市公司人工智能词频统计数据(年报词频统计) RGA模块讲解 低代码平台与 AI 融合:从 Activity 流程到智能 ITSM 的落地实践
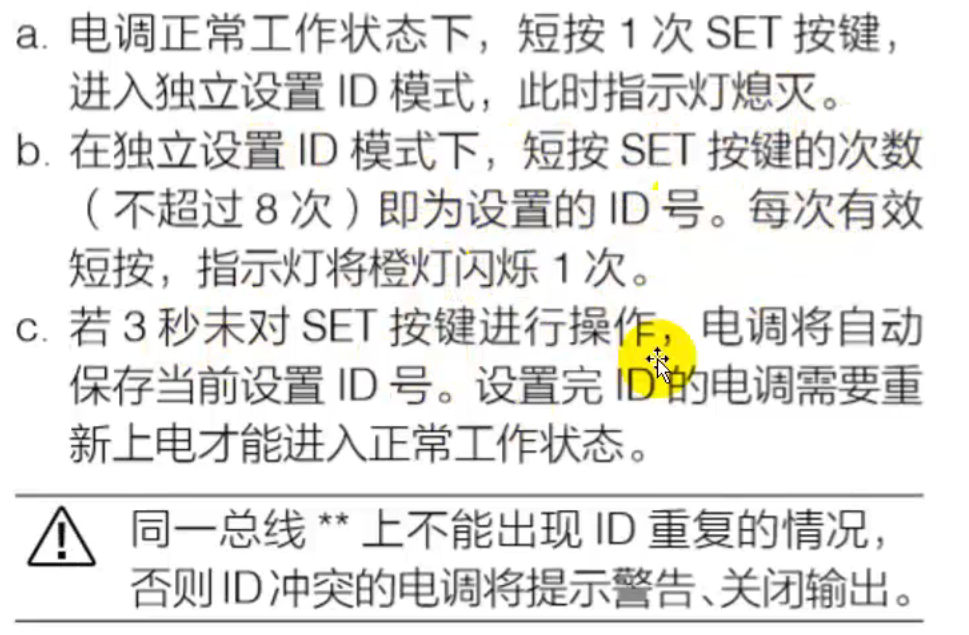
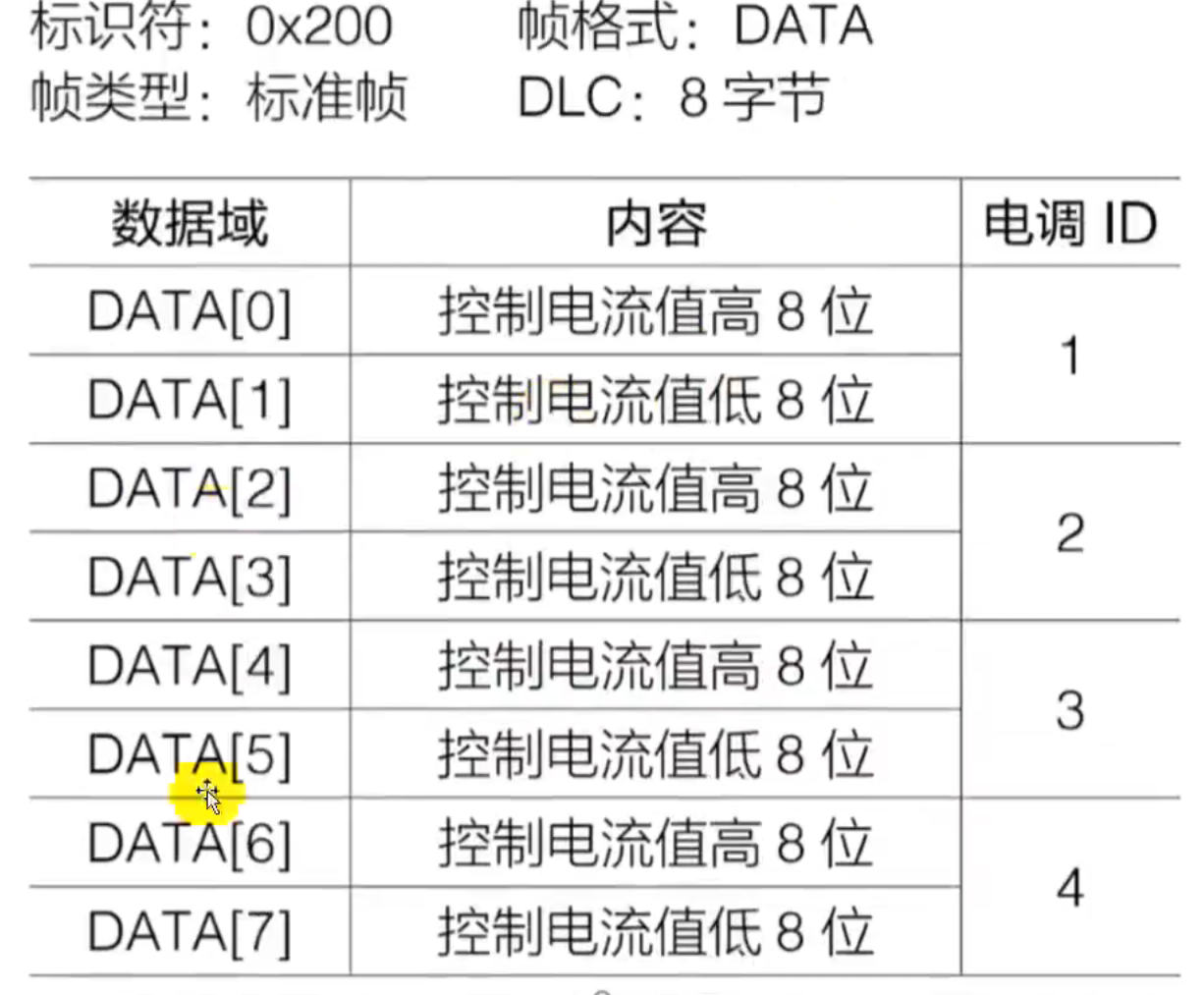
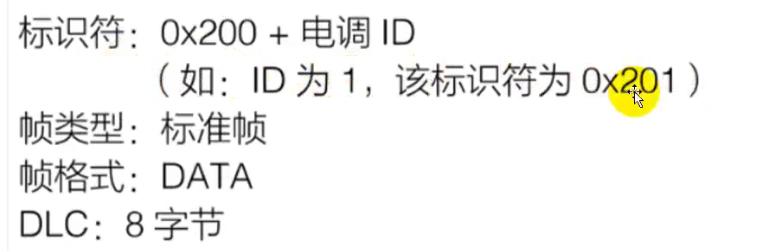
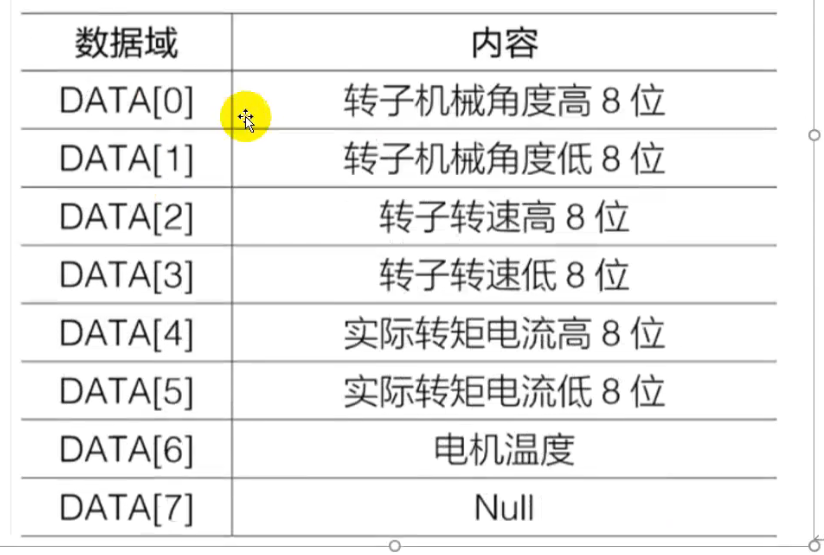
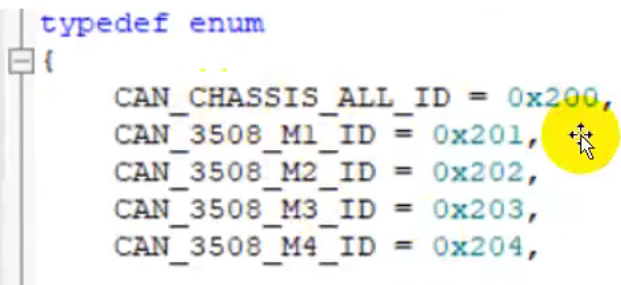
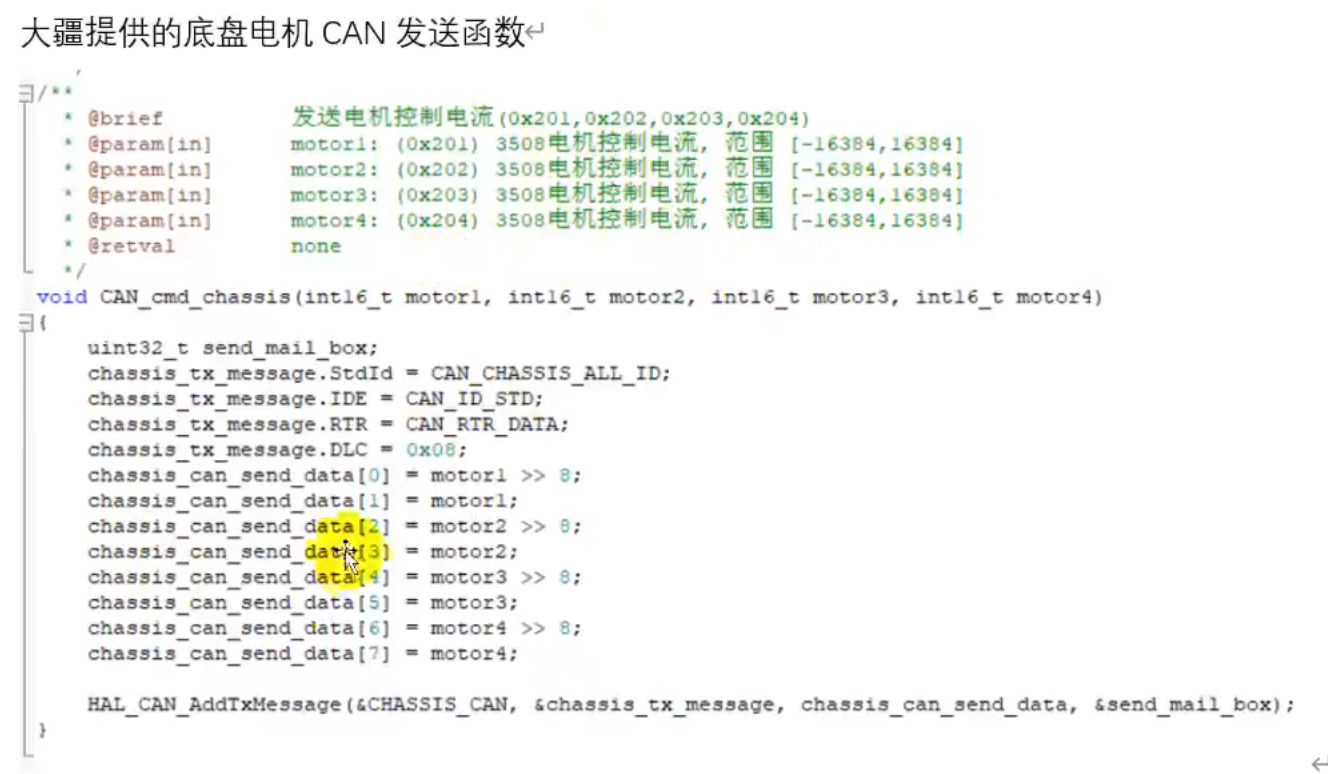
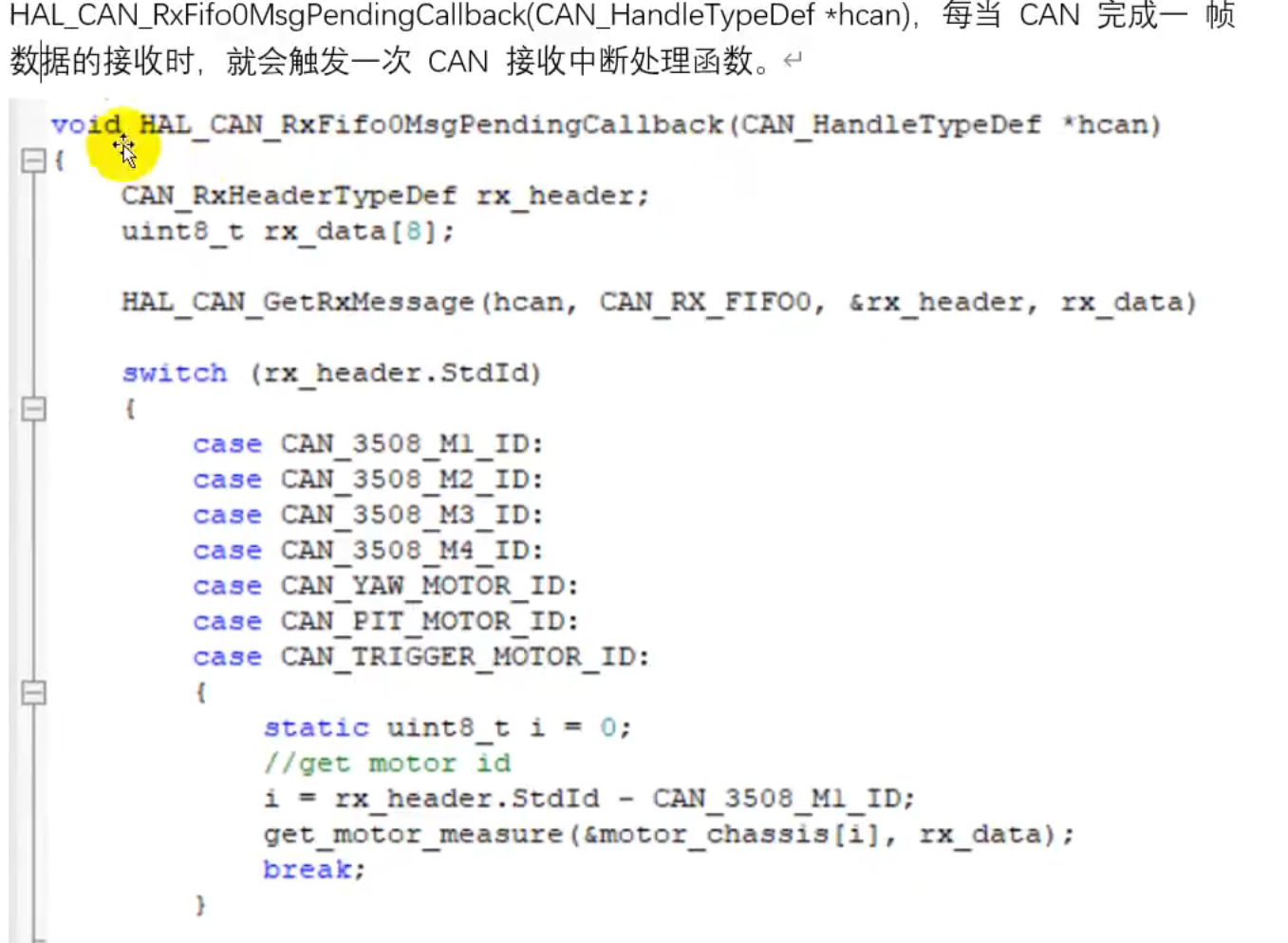
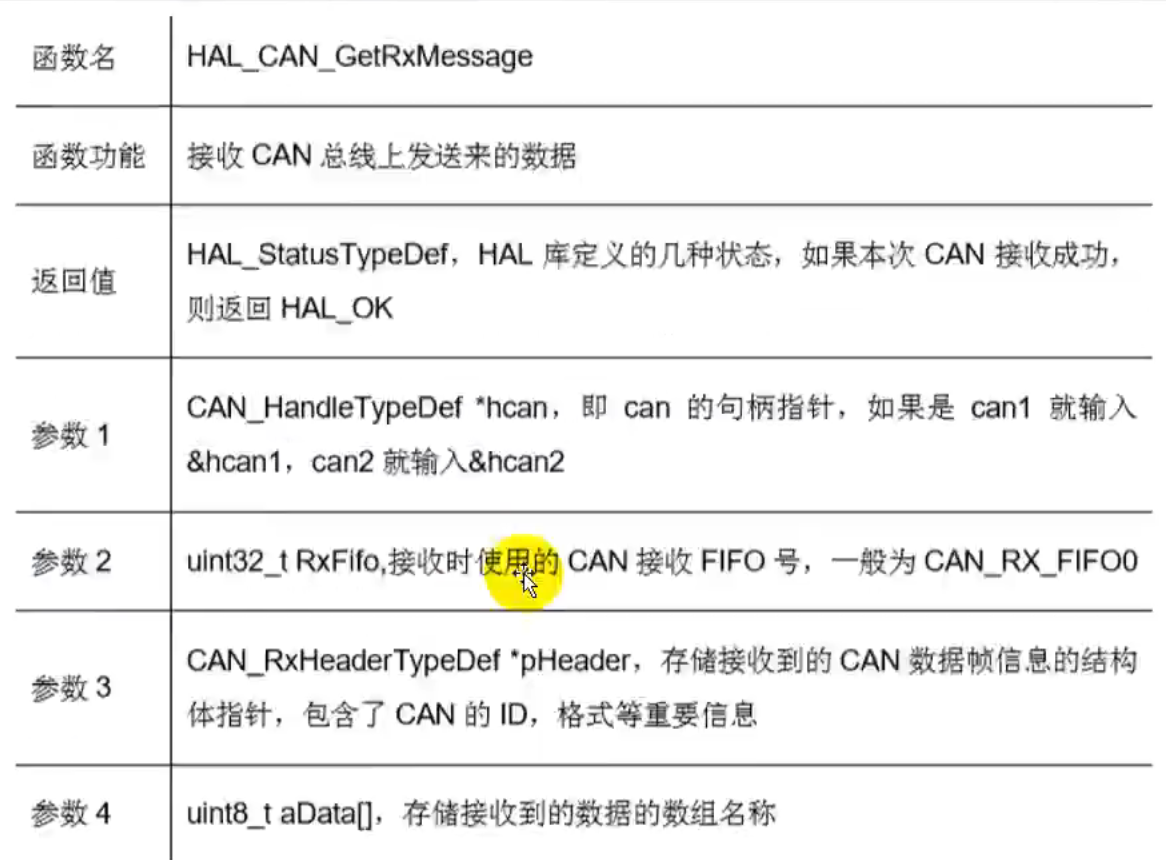
文章目录 C620电调ID设置速率 电调发送报文电调接收报文cubemx程序初始化发送接收 C620电调 ID设置 速率 1Mbps 电调发送报文 发送的数据为控制电机的输出电流,需要将can数据帧的ID设置为0x200 电调接收报文 机械角度:电机的0到360度映射到0到几千转速:rpm,转每分 cubemx 程序 初始化 直接用 当前过滤器配置中,将过滤标识符(FilterIdHigh、FilterIdLow )和屏蔽标识符(FilterMaskIdHigh、FilterMaskIdLow )都设置为0x0000 ,意味着接收所有 CAN 消息 发送 接收