单片机-STM32部分:12、I2C
飞书文档![]() https://x509p6c8to.feishu.cn/wiki/MsB7wLebki07eUkAZ1ec12W3nsh
https://x509p6c8to.feishu.cn/wiki/MsB7wLebki07eUkAZ1ec12W3nsh
一、简介
IIC协议,又称I2C协议,是由PHILP公司在80年代开发的两线式串行总线,用于连接微控制器及其外围设备,IIC属于半双工同步通信方式。
| IIC是一种同步的串行通信总线协议,它可以在多个设备之间传输数据。IIC总线由两根线组成:数据线(SDA)和时钟线(SCL)。它使用主从模式,其中一个设备作为主设备控制总线并向其他设备发出命令。IIC协议可以支持高速数据传输和多设备通信,但它的距离限制较短。 |
多主控(multimastering)
其中任何能够进行发送和接收的设备都可以成为主总线,一个主控能够控制信号的传输和时钟频率。当然,在任何时间点上只能有一个主控。
特征:简单性和有效性
两根线,在标准模式下,I2C总线的最大长度为5米,最大速率为100 kbit/s。在快速模式下,I2C总线的最大长度为1米,最大速率为400 kbit/s。在高速模式下,I2C总线的最大长度为0.4米,最大速率为3.4 Mbit/s。需要注意的是,总线长度的实际限制还取决于总线上的电容负载和电缆质量等因素。
IIC完成的通讯过程如下:
IIC完整的通讯过程
- 1、总线是空闲状态,SCL=1,SDA =1;
- 2、要开始传输数据了,此时SCL还是高电平,SCL=1,主机将SDA从1变成0;
- 3、跟哪个从机通讯,把从机的地址发出去。一般地址是8个bit(也有16个bit的),这8个bit其实真实的地址是7个bit,最后1个bit是用来表示读或者写的。1表示读,0表示写;这个过程相当于主机往SDA上发了8个bit的数据(地址也是数据啊);
- 4、主机发地址的过程,相当于在找从机,从机是要给应答信号的,就是ACK,你老板喊你,你也得先回答声A吧;
- 5、应答之后,就是要传输数据了,如果第3步中发的地址是写操作,那就由主机来控制SDA的电平变化,如果第3步中发的地址是读操作,那就由从机来控制SDA的电平变化;
- 6、每次8bit的数据传输完成,都要有个应答信号,谁接收数据,谁来应答
- 7、完事之后,在SCL高电平时,主机把SDA从低电平拉高,表示结束。
STM32中的I2C
STM32 芯片有多个 I2C 外设,它们的 I2C 通讯信号引出到不同的 GPIO 引脚上,使用时必须配置到这些指定的引脚。
SMBus(系统管理总线—System Management Bus)
SMBus总线和I2C是比较类似的,所以STM32兼容了这两种设计,一般场景比较少用SMBus,I2C则是非常多外设使用的接口,我们本节课以I2C为主,看看如何使用STM32的I2C功能。
选择为I2C功能后,会自动选择对应的IO作为I2C的IO,这里I2C是支持重映射的,我们可以根据需要手动修改。
然后,我们可以设置I2C的主从模式,这里我们设置主机模式,模式为Standard Mode,速率为100000Hz。
Master features 主模式特性
Master 为主机模式相关参数,如果是驱动触摸屏、传感器、EEPROM等外设,只需配置这里的参数。
Slave 为从机模式相关参数,如果是开发触摸屏,传感器本身,则需要配置从机参数。
Standard Mode:标准模式
Fast Mode:高速模式
这两种模式支持的通讯速率不同,在标准模式中,最大只能设置100KHz,作为主机时,速率大小要看从机支持的最大速率,一般来说100KHz可以满足上述的触摸屏、传感器、EEPROM的驱动。
Slave features 从模式特性
作为主机使用时,这里无需修改
| Clock No Stretch Mode: 时钟没有扩展模式 |
然后就可以生成MDK工程,这里主要用的函数有四个:
| HAL_I2C_Master_Transmit(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, |
EEPROM
EEPROM (Electrically Erasable Programmable read only memory)是指带电可擦可编程存储器。是一种掉电后数据不丢失的存储芯片。
https://item.szlcsc.com/320744.html
BL24C02是一个2Kbit的EEPROM, 内部含有256个字节可以存储数据,总共有32页,每页8Byte。
|
|
|
设备读写地址说明
其中设备地址如下,A2 A1 A0对应芯片硬件接的电平

如果我们把A2 A1 A0都接到GND,这时候,
写数据时,设备地址字节应该是0b1010 0000=0xA0
读数据时,设备地址字节应该是0b1010 0001=0xA1
参考飞书文档
字节写
每次写入一个Byte数据
- 先发送起始信号
- 发送从设备地址+写入标志数据(Wbit=0),等待应答
- 发送写入地址,等待应答
- 发送数据,等待应答
- 发送结束信号。
页写
每次可以写入一页(8Byte)的数据

读字节
连续读
连续读操作可通过立即读或选择性读操作启动。在 24C02 发送完一个 8 位字节数据后,主器件产生一个应答信号来响应,告知 24C02 主器件要求更多的数据,对应每个主机产生的应答信号 24C02 将发送一个 8 位数据字节。当主器件不发送应答信号而发送停止位时结束此操作。
STM32CUBEMX开启I2C1,对应PB6 PB7
然后打开USART1用于打印日志,方便查看
注意,要勾选MicroLIB哦,否则printf打印不了数据
然后添加代码如下:
main.c/* USER CODE BEGIN Includes */
#include <stdio.h>
/* USER CODE END Includes *//* USER CODE BEGIN 0 */
#define ADDR_24LCxx_Write 0xA0
#define ADDR_24LCxx_Read 0xA1
#define BufferSize 8
uint8_t WriteBuffer[BufferSize] = {1,2,3,4,5,6,7,8};
uint8_t ReadBuffer[BufferSize] = {0};
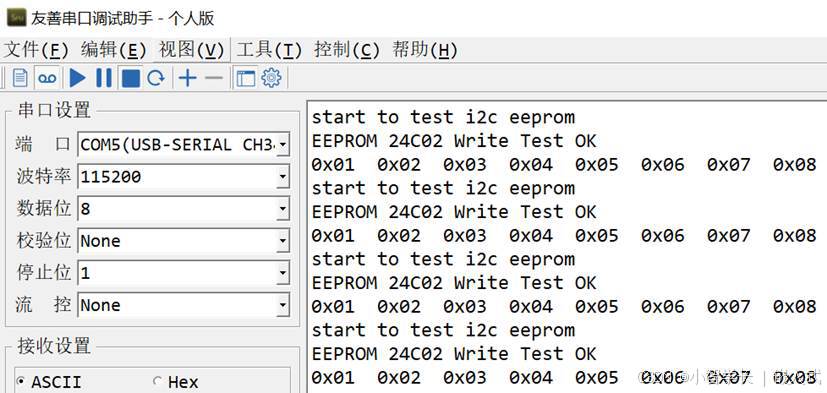
/* USER CODE END 0 */while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 */printf("start to test i2c eeprom\n");if(HAL_I2C_Mem_Write(&hi2c1, ADDR_24LCxx_Write, 0, I2C_MEMADD_SIZE_8BIT, WriteBuffer, sizeof(WriteBuffer), 0xff) == HAL_OK){printf("EEPROM 24C02 Write Test OK \r\n");}HAL_Delay(10); /* read date from EEPROM */HAL_I2C_Mem_Read(&hi2c1, ADDR_24LCxx_Read, 0, I2C_MEMADD_SIZE_8BIT, ReadBuffer, sizeof(ReadBuffer), 0xff);for(int i = 0; i < sizeof(ReadBuffer); i++){printf("0x%02X ",ReadBuffer[i]);}HAL_Delay(1000);}/* USER CODE END 3 *//* USER CODE BEGIN 4 */
int fputc(int ch, FILE *f)
{HAL_UART_Transmit(&huart1 , (uint8_t *)&ch, 1, 0xFFFF);return ch;
}打印如下
温湿度传感器
温湿度传感器:CJ-GXHT3L
GXHT3L-DIS 是中科银河芯开发的新一代单芯片集成温湿度一 体传感器。
★ I2C 接口,通信速度高达 1MHz
★ 两个用户可选择的地址
★ GXHT3L 典型精度为±4%RH 和±0.5°C
★ GXHT30 典型精度为±3%RH 和±0.3°C
★ GXHT31 典型精度为±2%RH 和±0.3°C
★ 单芯片集成温湿传感器
★ 高可靠性和长期稳定性
★ 测量 0-100%范围相对湿度
★ 测量-45-130℃范围内温度
https://item.szlcsc.com/3199174.html
|
|
|
|
关于设备地址与ADDR管脚说明:
这里要注意的是,0x44指的是I2C地址的高7位,第八位为读写标志位。
0x44 = 0b0100 0100,把最高位去掉 = 0b100 0100
写数据时,设备地址字节应该是0b1000 1000=0x88
读数据时,设备地址字节应该是0b1000 1001=0x89
高重复率和周期转换频率,例如0x2130中,21代表每秒转换一次,30代表高重复率。
设置进入连续转换模式的命令
* USER CODE BEGIN Includes */
#include <stdio.h>
#define GXHT3L_ADDR_WRITE 0x44<<1 //10001000
#define GXHT3L_ADDR_READ (0x44<<1)+1 //10001001typedef enum
{/* 软件复位命令 */SOFT_RESET_CMD = 0x30A2, /* 加热使能/禁能命令 */PREHEAT_ENABLE_CMD = 0x306D,PREHEAT_DISENABLE_CMD = 0x3066,/* 芯片状态命令 */DEVICE_STATUS_CMD = 0xF32D,/*单次测量模式命名格式:Repeatability_CS_CMDCS:Clock stretching*/HIGH_ENABLED_CMD = 0x2C06,MEDIUM_ENABLED_CMD = 0x2C0D,LOW_ENABLED_CMD = 0x2C10,HIGH_DISABLED_CMD = 0x2400,MEDIUM_DISABLED_CMD = 0x240B,LOW_DISABLED_CMD = 0x2416,/*周期测量模式命名格式:Repeatability_MPS_CMDMPS:measurement per second*/HIGH_0_5_CMD = 0x2032,MEDIUM_0_5_CMD = 0x2024,LOW_0_5_CMD = 0x202F,HIGH_1_CMD = 0x2130,MEDIUM_1_CMD = 0x2126,LOW_1_CMD = 0x212D,HIGH_2_CMD = 0x2236,MEDIUM_2_CMD = 0x2220,LOW_2_CMD = 0x222B,HIGH_4_CMD = 0x2334,MEDIUM_4_CMD = 0x2322,LOW_4_CMD = 0x2329,HIGH_10_CMD = 0x2737,MEDIUM_10_CMD = 0x2721,LOW_10_CMD = 0x272A,/* 周期测量模式读取数据命令 */READOUT_FOR_PERIODIC_MODE = 0xE000,
} GXHT3L_CMD;
/* USER CODE END Includes *//* USER CODE BEGIN 0 */
/*** @brief 向GXHT3L发送一条指令(16bit)* @param cmd —— GXHT3L指令(在GXHT3L_MODE中枚举定义)* @retval 成功返回HAL_OK
*/
static uint8_t GXHT3L_Send_Cmd(GXHT3L_CMD cmd)
{uint8_t cmd_buffer[2];cmd_buffer[0] = cmd >> 8;cmd_buffer[1] = cmd;return HAL_I2C_Master_Transmit(&hi2c2, GXHT3L_ADDR_WRITE, (uint8_t*) cmd_buffer, 2, 0xFFFF);
}/*** @brief 复位GXHT3L* @param none* @retval none
*/
static void GXHT3L_Reset(void)
{GXHT3L_Send_Cmd(SOFT_RESET_CMD);HAL_Delay(20);
}void GXHT3L_Preheat_Disable(void)
{GXHT3L_Send_Cmd(PREHEAT_DISENABLE_CMD);HAL_Delay(20);
}uint8_t GXHT3L_Read_Status(uint8_t* dat)
{GXHT3L_Send_Cmd(DEVICE_STATUS_CMD);return HAL_I2C_Master_Receive(&hi2c2, GXHT3L_ADDR_READ, dat, 3, 0xFFFF);
}/*** @brief 初始化GXHT3L* @param none* @retval 成功返回HAL_OK* @note 周期测量模式
*/
uint8_t GXHT3L_Init(void)
{return GXHT3L_Send_Cmd(MEDIUM_2_CMD);
}/*** @brief 从GXHT3L读取一次数据* @param dat —— 存储读取数据的地址(6个字节数组)* @retval 成功 —— 返回HAL_OK
*/
uint8_t GXHT3L_Read_Dat(uint8_t* dat)
{GXHT3L_Send_Cmd(READOUT_FOR_PERIODIC_MODE);return HAL_I2C_Master_Receive(&hi2c2, GXHT3L_ADDR_READ, dat, 6, 0xFFFF);
}#define CRC8_POLYNOMIAL 0x31uint8_t CheckCrc8(uint8_t* const message, uint8_t initial_value)
{uint8_t remainder; //余数uint8_t i = 0, j = 0; //循环变量/* 初始化 */remainder = initial_value;for(j = 0; j < 2;j++){remainder ^= message[j];/* 从最高位开始依次计算 */for (i = 0; i < 8; i++){if (remainder & 0x80){remainder = (remainder << 1)^CRC8_POLYNOMIAL;}else{remainder = (remainder << 1);}}}/* 返回计算的CRC码 */return remainder;
}/*** @brief 将GXHT3L接收的6个字节数据进行CRC校验,并转换为温度值和湿度值* @param dat —— 存储接收数据的地址(6个字节数组)* @retval 校验成功 —— 返回0* 校验失败 —— 返回1,并设置温度值和湿度值为0
*/
uint8_t GXHT3L_Dat_To_Float(uint8_t* const dat, float* temperature, float* humidity)
{uint16_t recv_temperature = 0;uint16_t recv_humidity = 0;/* 校验温度数据和湿度数据是否接收正确 */if(CheckCrc8(dat, 0xFF) != dat[2] || CheckCrc8(&dat[3], 0xFF) != dat[5])return 1;/* 转换温度数据 */recv_temperature = ((uint16_t)dat[0]<<8)|dat[1];*temperature = -45 + 175*((float)recv_temperature/65535);/* 转换湿度数据 */recv_humidity = ((uint16_t)dat[3]<<8)|dat[4];*humidity = 100 * ((float)recv_humidity / 65535);return 0;
}/* USER CODE BEGIN 1 */uint8_t recv_dat[6] = {0};uint8_t recv_status[3] = {0};float temperature = 0.0;float humidity = 0.0;/* USER CODE END 1 *//* USER CODE BEGIN 2 */GXHT3L_Reset();if(GXHT3L_Init() == HAL_OK)printf("GXHT3L init ok.\n");elseprintf("GXHT3L init fail.\n");if(GXHT3L_Read_Status(recv_status) == HAL_OK){printf("GXHT3L Read Status ok. Status = 0x%x%x\n",recv_status[0],recv_status[1]);}elseprintf("GXHT3L Read Status fail.\n");/* USER CODE END 2 */while (1){/* USER CODE BEGIN 3 */HAL_Delay(1000);if(GXHT3L_Read_Dat(recv_dat) == HAL_OK){if(GXHT3L_Dat_To_Float(recv_dat, &temperature, &humidity)==0){printf("temperature = %f, humidity = %f\n", temperature, humidity);}else{printf("crc check fail.\n");}}else{printf("read data from GXHT3L fail.\n");}}/* USER CODE END 3 *//* USER CODE BEGIN 4 */
int fputc(int ch, FILE *f)
{HAL_UART_Transmit(&huart1 , (uint8_t *)&ch, 1, 0xFFFF);return ch;
}
/* USER CODE END 4 */最终工程,可以参考淘宝旺旺发送的源码部分哦