ROS第十三梯:RViz+Marker——自定义几何形状可视化
1)概述
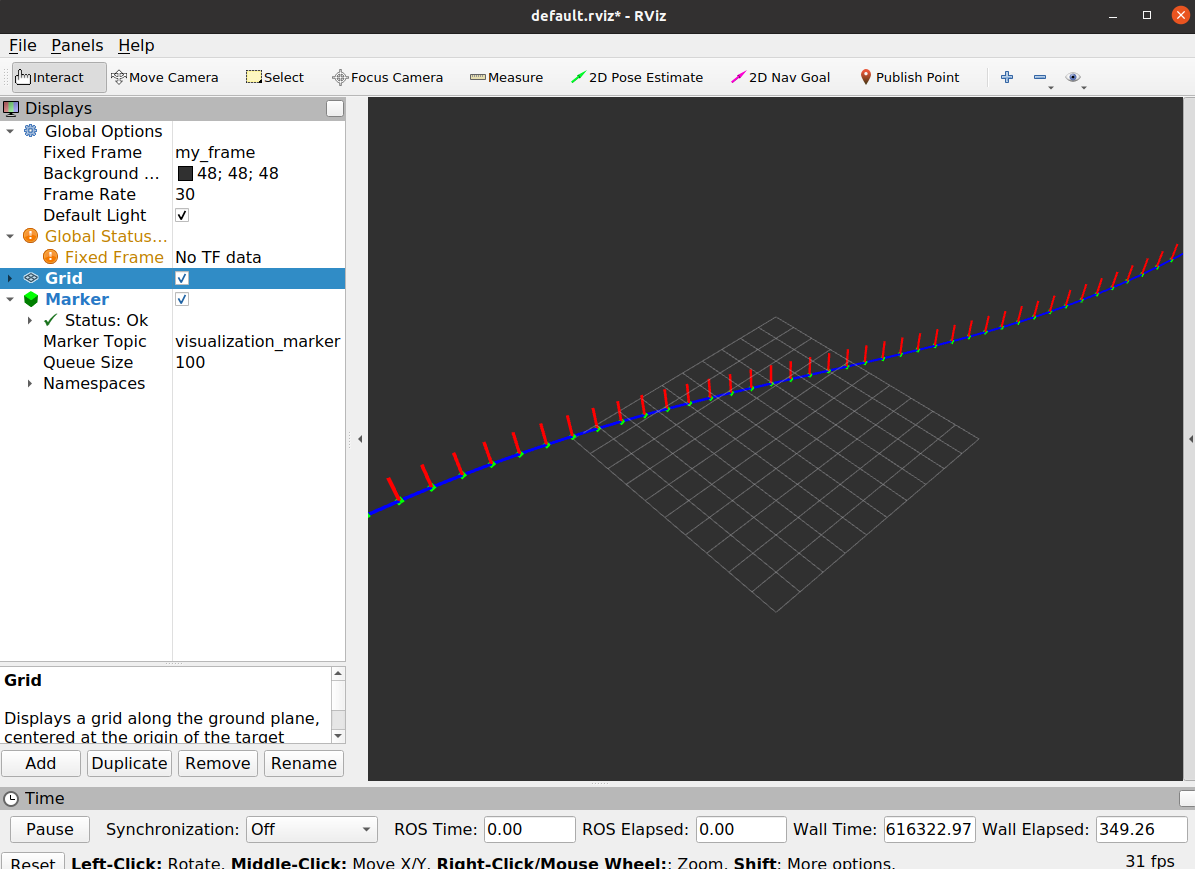
在ROS(Robot Operating System)中,Marker是一种用于在RViz(Robot Visualization)中显示自定义几何形状和注释的工具。Marker是通过visualization_msgs/Marker消息类型发布的。可以在RViz中以各种形式(如点、线、文本、立方体等)显示数据。
2)主要消息格式
1)概述
在ROS(Robot Operating System)中,Marker是一种用于在RViz(Robot Visualization)中显示自定义几何形状和注释的工具。Marker是通过visualization_msgs/Marker消息类型发布的。可以在RViz中以各种形式(如点、线、文本、立方体等)显示数据。
2)主要消息格式