【论文阅读】HunyuanVideo: A Systematic Framework For Large Video Generative Models
HunyuanVideo: A Systematic Framework For Large Video Generative Models
-
原文摘要
-
研究背景与问题
-
视频生成的变革性影响:近期视频生成技术的进步深刻改变了个人生活与行业应用。
-
闭源模型的垄断:主流视频生成模型(如Runway Gen-3、Luma 1.6等)均为闭源,导致工业界与开源社区之间存在显著的性能差距。
-
-
核心贡献:HunyuanVideo模型
-
开源视频基础模型:提出首个性能媲美甚至超越闭源模型的开放视频生成框架。
-
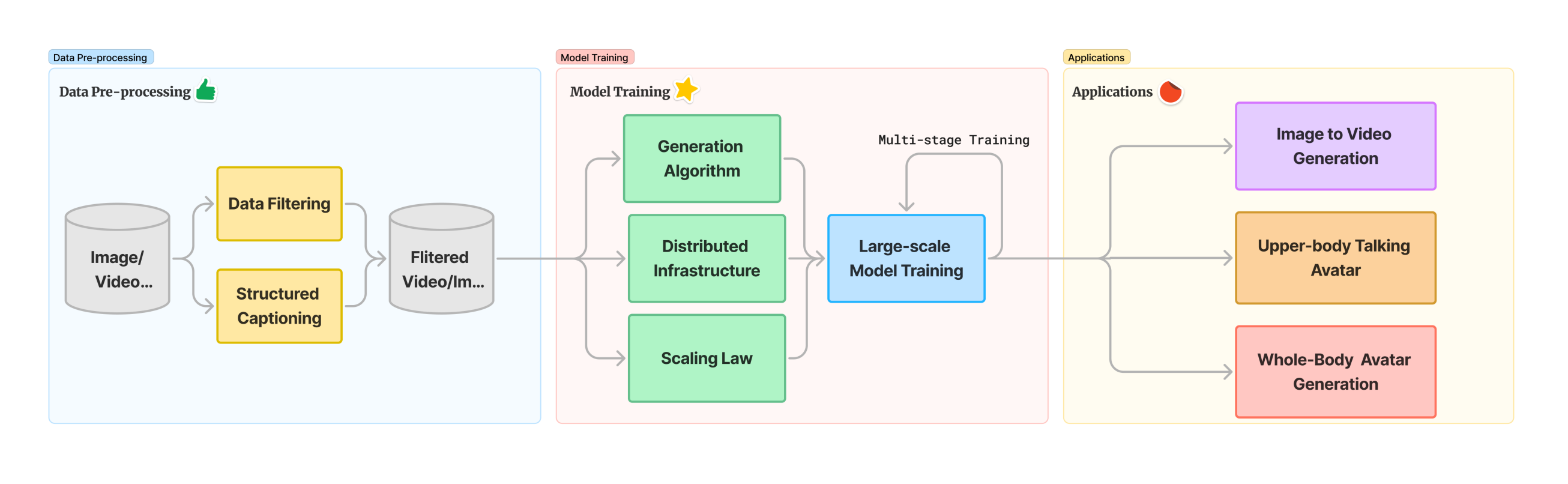
四大关键技术:
- 数据策展(curation):高质量数据集的构建与优化。
- 先进架构设计:创新的模型结构设计。
- 渐进式训练与扩展:通过分阶段训练和参数缩放提升性能。
- 高效基础设施:支持大规模训练与推理的底层系统优化。
-
-
模型规模与性能
-
参数量:超过130亿参数,为当前开源领域最大的视频生成模型。
-
性能优势:在视觉质量、运动动态、文本-视频对齐、专业拍摄技巧等方面表现优异,经专业人工评估,超越SOTA闭源模型(如Runway Gen-3)及3个中国顶尖视频模型。
-
-
实验与设计亮点
-
针对性优化:通过大量实验验证了模型在关键指标(如动态效果、文本对齐)上的优越性。
-
专业评估:采用人工评估(非自动化指标)确保结果可靠性。
-
-
-
Hunyuan Training System
1.Introduction
-
技术背景
-
扩散模型的优势:
- 相比传统GAN方法,扩散模型在图像/视频生成质量上表现更优,已成为主流生成范式。
- 图像生成领域的繁荣:开源生态活跃(如Stable Diffusion),催生大量算法创新和应用(如ControlNet、LoRA)。
-
视频生成的滞后:
- 基于扩散模型的视频生成技术发展缓慢,开源社区缺乏能与闭源模型(如Gen-3)竞争的基础模型。
- 关键瓶颈:缺乏像T2I(Text-to-Image)领域那样强大的开源视频基础模型。
-
-
问题分析:闭源垄断
-
闭源vs开源的不平衡:
- 闭源视频模型(如MovieGen)性能领先但未开源,压制了开源社区的创新潜力。
- 现有开源视频模型(如MovieGen)虽表现良好,但未形成稳定开源生态。
-
技术挑战:
- 直接扩展图像生成方法(如简单Transformer+Flow Matching)效率低下,计算资源消耗大。
-
-
HunyuanVideo的提出
-
核心目标:
- 构建首个高性能、全栈开源的视频生成基础模型,填补开源空白。
-
系统性框架:
- 训练基础设施:优化分布式训练与推理效率。
- 数据治理:互联网规模图像/视频的精选与预处理。
- 架构优化:突破简单Transformer的局限,设计高效缩放策略。
- 渐进式训练:分阶段预训练+微调,平衡资源与性能。
-
关键技术突破:
- 高效缩放策略:减少5倍计算资源,同时保持模型性能。
- 超大规模训练:成功训练130亿参数模型(当前开源最大)。
-
-
Hunyuan性能验证
-
四大核心指标:
- 视觉质量、运动动态、视频-文本对齐、语义场景切换(scene cut)。
-
评测结果:
- 评测规模:60人团队使用1,500+文本提示,对比Gen-3、Luma 1.6及3个中国商业模型。
- 关键结论:HunyuanVideo综合满意度最高,运动动态表现尤为突出。
-
2. Data Pre-processing
- 数据来源&整体策略
- 训练策略:图像视频联合训练
- 数据分类:视频(5类)+ 图像(2类),针对性优化训练
- 合规保障:GDPR + 隐私计算技术,确保数据安全
- 高质量筛选:专业级标准(构图/色彩/曝光)提升模型表现
- 实验验证:高质量数据对模型性能有显著增益
2.1 Data Filtering
2.1.1 视频数据预处理
-
初始处理(Raw Video Processing)
-
单镜头分割:使用 PySceneDetect将原始视频拆分成单镜头片段(single-shot clips),避免跨镜头内容干扰。
-
清晰帧提取:通过 OpenCV 的 Laplacian 算子检测最清晰的帧作为片段的起始帧。
-
视频嵌入计算:使用内部 VideoCLIP 模型计算每个片段的嵌入向量(embeddings),用于:
- 去重:基于余弦相似度(Cosine distance)剔除重复/高度相似的片段。
- 概念平衡:通过 k-means 聚类生成约 1 万个概念中心(concept centroids),用于数据重采样,避免某些概念过拟合。
-
-
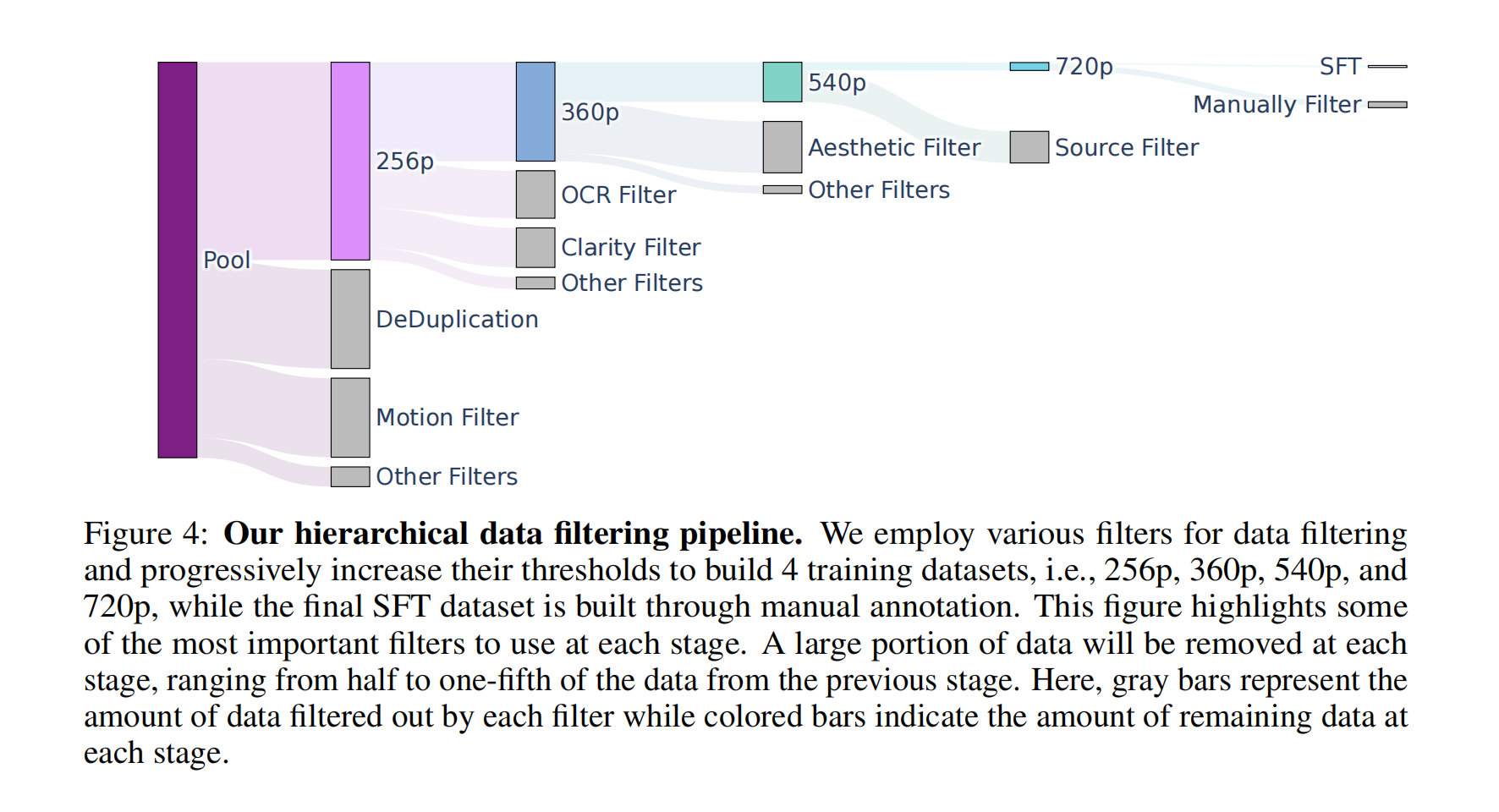
分层过滤(Hierarchical Filtering Pipeline)
-
通过多级过滤器逐步提升数据质量,最终生成 5 个训练数据集(对应后文的 5 个训练阶段)。关键过滤器包括:
-
美学质量评估
- 使用 Dover从**美学(构图、色彩)和技术(清晰度、曝光)**角度评分,剔除低质量视频。
- 训练专用模型检测模糊帧,移除不清晰的片段。
-
运动动态筛选
- 基于光流估计optical flow计算运动速度,过滤静态或运动过慢的视频。
-
场景边界检测
- 结合 PySceneDetect和 Transnet v2精确识别场景切换,确保片段连贯性。
-
文本与敏感信息处理
-
OCR 模型:移除含过多文字(如字幕)的片段,并裁剪字幕区域。
-
YOLOX类检测器:去除水印、边框、logo 等敏感或干扰元素。
-
-
-
实验验证
- 用小规模 HunyuanVideo 模型测试不同过滤器的效果,动态调整阈值(如严格度),优化最终流程。
-
-
渐进式数据增强
-
分辨率提升:从 256×256(65帧)逐步增加到 720×1280(129帧),适应不同训练阶段需求。
-
过滤严格度:早期阶段放宽标准保留多样性,后期逐步收紧(如更高美学/运动要求)。
-
-
微调数据集(Fine-tuning Dataset)
- 人工精选 100 万样本,聚焦高质量动态内容:
- 美学维度:色彩协调、光影、主体突出、空间布局。
- 运动维度:速度适中、动作完整性、无运动模糊。
- 人工精选 100 万样本,聚焦高质量动态内容:
2.1.2 图像数据过滤
-
复用视频的大部分过滤器(排除运动相关),构建 2 个图像数据集:
-
初始预训练数据集
- 规模:数十亿图文对,经过基础过滤(如清晰度、美学)。
- 用途:文本到图像(T2I)的第一阶段预训练。
-
第二阶段预训练数据集
-
规模:数亿精选样本,过滤阈值更严格(如更高分辨率、更优构图)。
-
用途:提升 T2I 模型的细节生成能力。
-
-
2.2 Data Annotaion
2.2.1 Structured Captioning
-
背景与问题
-
传统标注的缺陷:
- 简短标注(Brief Captions):信息不完整(如仅描述主体,忽略背景/风格)。
- 密集标注(Dense Captions):冗余或噪声多(如重复描述同一物体)。
-
需求:需兼顾全面性(多维度描述)、信息密度(无冗余)和准确性(与视觉内容严格对齐)。
-
-
解决方案:基于VLM的结构化标注
-
开发内部视觉语言模型(VLM),生成JSON格式的结构化标注,涵盖以下维度:
字段 描述 示例 Short Description 场景主要内容摘要 “A woman running in a park.” Dense Description 细节描述(含场景过渡、摄像机运动) “Camera follows a woman jogging through a sunlit park with trees.” Background 环境背景(地理位置、时间、天气等) “Sunny afternoon in Central Park.” Style 视频风格(纪录片、电影感、写实、科幻等) “Cinematic, shallow depth of field.” Shot Type 镜头类型(特写、中景、航拍等) “Medium shot, low angle.” Lighting 光照条件(自然光、背光、高对比度等) “Golden hour lighting.” Atmosphere 氛围(紧张、温馨、神秘等) “Energetic and lively.” Metadata Tags 从元数据提取的附加标签(来源、质量评分等) “Source: professional DSLR, Quality: 4.5/5” -
实现细节
-
多样性增强:通过随机丢弃(Dropout)和排列组合策略,生成不同长度/模式的变体,防止模型过拟合单一标注风格。
-
例如:同一视频可能生成以下两种标注:
// 变体1:强调运动与镜头 {"Dense Description": "Camera pans left to follow a cyclist...", "Shot Type": "Pan left"} // 变体2:强调风格与氛围 {"Style": "Documentary", "Atmosphere": "Gritty urban vibe"}
-
-
全数据覆盖:所有训练图像/视频均通过此标注器处理,确保数据一致性。
-
-
2.2.2 Camera Movement Types
-
研究动机
-
摄像机运动是视频动态表现的核心,但现有生成模型缺乏对其的显式控制能力。
-
需高精度分类以支持生成时的运动控制(如“镜头向右平移”)。
-
-
训练运动分类器
-
训练专用模型,预测以下14种运动类型:
运动类型 描述 应用场景 Zoom in/out 推近/拉远 突出主体或展示环境 Pan (up/down/left/right) 水平/垂直平移镜头 跟随运动或展示广阔场景 Tilt (up/down/left/right) 倾斜调整视角 创造戏剧化视角(如仰拍反派) Around left/right 环绕拍摄 3D场景展示(如产品展示) Static shot 固定镜头 对话场景或稳定画面 Handheld shot 手持抖动镜头 模拟纪实风格(如战争片) -
高置信度预测结果直接写入结构化标注JSON中
-
3. Model Design
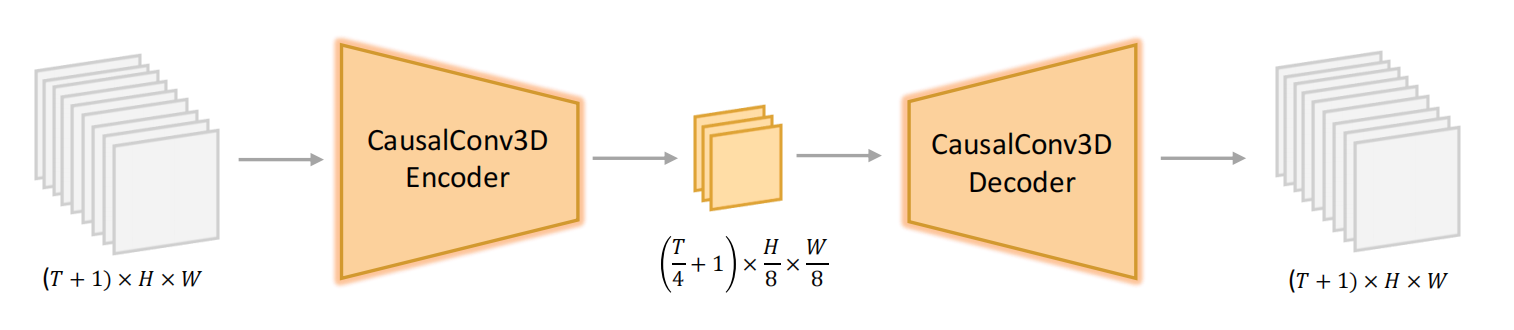
3.1 3D VAE Design
-
为了同时处理视频和图像,文章使用了CausalConv3D
-
网络架构设计
-
输入与输出格式
-
输入视频:形状为 ( T + 1 ) × 3 × H × W (T+1)×3 × H × W (T+1)×3×H×W
-
输出潜变量:形状为 ( T / c t + 1 ) × C × ( H / c s ) × ( W / c s ) (T/cₜ + 1) × C × (H/cₛ) × (W/cₛ) (T/ct+1)×C×(H/cs)×(W/cs)
cₜ:时间下采样因子(temporal stride),默认为 4(即每4帧压缩为1个隐变量帧)。cₛ:空间下采样因子(spatial stride),默认为 8(如输入256×256 → 隐空间32×32)。C:隐变量通道数,默认为 16。
-
-
3D卷积编码器:
- 采用 CausalConv3D(因果3D卷积),确保时间维度上的因果性(当前帧仅依赖过去帧)。
- 层级式下采样结构,逐步压缩时空维度(类似3D版U-Net)。
-
3D卷积解码器:
- 对称结构,通过转置3D卷积(Transpose3DConv)重建原始分辨率视频。
-
为什么输入是T+1帧
- 要以第一帧作为参考帧,来实现因果卷积
-
3.1.1 Training
-
训练数据与初始化
-
不从预训练图像VAE初始化:
- HunyuanVideo 从头训练 3DVAE,避免预训练图像VAE的偏差。
- 原因:视频数据具有时空连续性,直接复用图像VAE参数会限制模型对运动信息的建模能力。
-
数据混合比例:
- 视频与图像数据按 4:1 混合训练,平衡时空动态(视频)与静态细节(图像)的学习。
-
-
损失函数设计
Loss = L 1 + 0.1 L lpips + 0.05 L adv + 1 0 − 6 L kl \text{Loss} = L_{1} + 0.1 L_{\text{lpips}} + 0.05 L_{\text{adv}} + 10^{-6} L_{\text{kl}} Loss=L1+0.1Llpips+0.05Ladv+10−6Lkl-
L1重建损失:
- 约束像素级重建精度,保留低频结构信息。
-
Llpips感知损失:
- 通过预训练VGG网络计算特征相似性,提升细节和纹理质量。
-
Ladv对抗损失:
- 添加判别器区分真实与重建帧,增强生成逼真度。
-
KL散度损失:
- 约束隐变量分布接近标准高斯(权重10⁻⁶),避免后验坍塌。
-
-
渐进式课程学习(Curriculum Learning)
-
分阶段训练: 逐步提升分辨率
- 低分辨率短视频(如256×256,16帧)→ 学习基础时空特征。
- 逐步提升至高清长视频(如720×1280,128帧),避免直接训练高难度数据的收敛问题。
-
动态帧采样:
- 随机从 1~8帧间隔 均匀采样,强制模型适应不同运动速度的视频(如快速动作或静态场景)。
- 若
k=1:取所有帧(处理原始运动速度)。 - 若
k=4:每4帧取1帧(模拟4倍速运动)。 - 若
k=8:每8帧取1帧(极端高速运动测试)。
- 若
- 随机从 1~8帧间隔 均匀采样,强制模型适应不同运动速度的视频(如快速动作或静态场景)。
-
3.1.2 Inference
-
问题背景:
- 高分辨率长视频(如4K)在单GPU上直接编码/解码会内存溢出(OOM)。
-
解决方案:
-
时空分块(Tiling):
- 将输入视频在时空维度切分为重叠块,各块单独编码和解码。
- 输出时通过线性混合重叠区消除接缝。
-
分块感知微调:
-
问题:直接分块推理会导致训练-测试不一致(出现边界伪影)。
-
改进:在训练中随机启用/禁用分块,使模型同时适应分块与非分块输入。
-
-
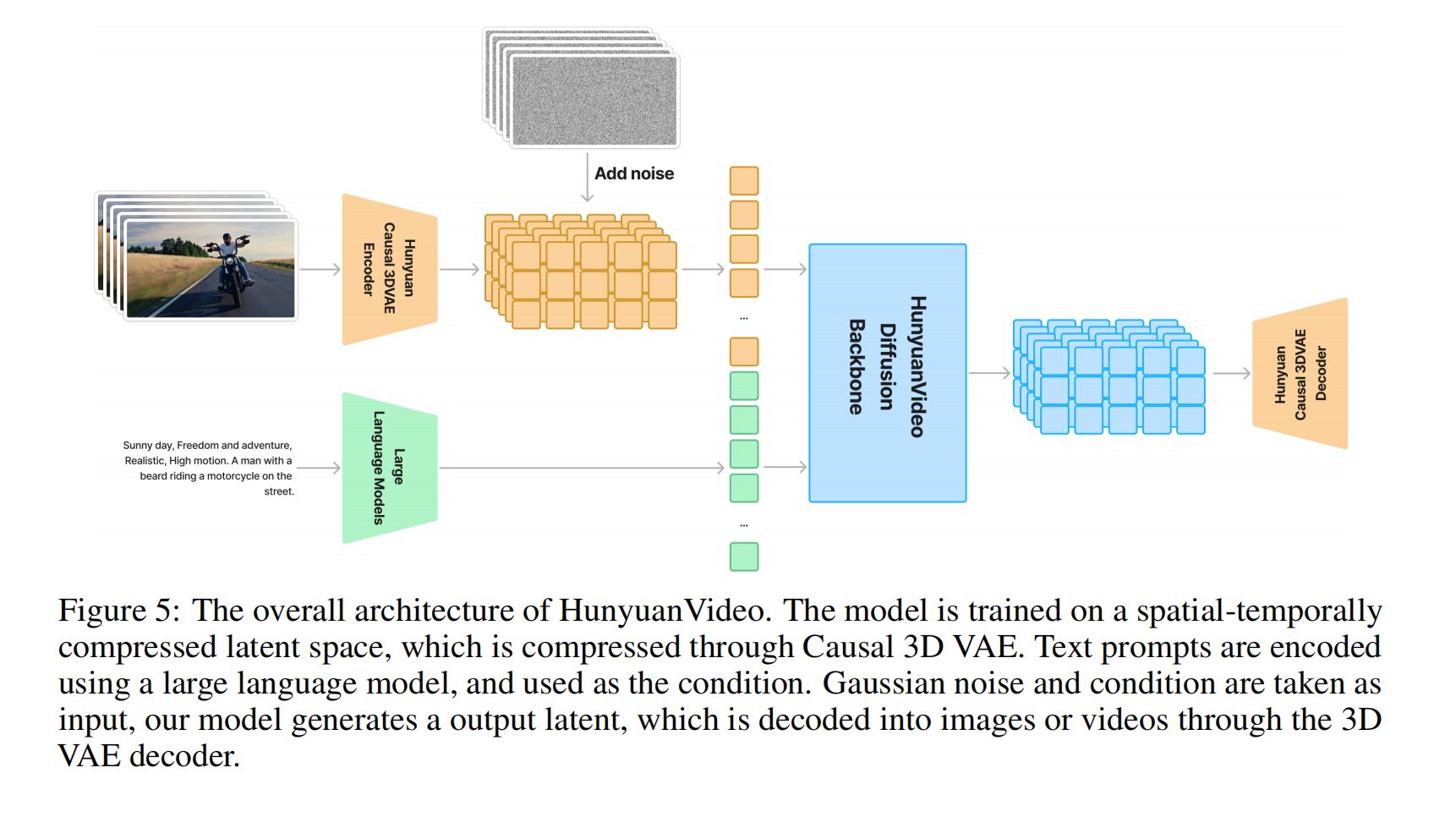
3.2 Unified Image and Video Generative Architecture
-
架构设计动机
-
统一架构的好处
-
性能优势:实验证明,全注意力机制(Full Attention)比分离的时空注意力生成质量更高,尤其在跨模态对齐上。
-
训练简化:图像(单帧)和视频(多帧)使用同一套参数,避免维护多个模型。
-
硬件友好:复用LLM的注意力优化技术(如FlashAttention),提升训练/推理效率。
-
-
输入统一化
-
图像视为单帧视频:
- 视频输入:
T × C × H × W(T帧,C通道,H×W分辨率)。 - 图像输入:
1 × C × H × W(T=1)。
- 视频输入:
-
潜空间压缩:通过3DVAE将像素空间映射到低维潜空间
-
-
3.2.1 Inputs
-
视频
-
3D Patch嵌入:
- 使用 3D卷积(核大小
kt × kh × kw)将潜变量切分为时空块(Patch)。 - 例如:
kt=2, kh=16, kw=16→ 每2帧×16×16像素区域转为1个Token。 - Token序列长度:
(T/kt) × (H/kh) × (W/kw)。
- 使用 3D卷积(核大小
-
示例计算:
- 输入潜变量:
16×16×32×32(T=16, H=W=32),kt=kh=kw=2→ Token数:8×16×16=2048。
- 输入潜变量:
-
-
文本
-
细粒度语义编码:
- 用 LLM将文本转为Token序列(如512维向量)。
-
全局语义补充:
- 通过 CLIP 提取文本的全局嵌入,与时间步嵌入融合后输入模型。
- 这里和stable diffusion不同,hunyuan将clip的token向量(L,D)进行全局池化后变成了包含全局语义信息的(1,D)向量
- 通过 CLIP 提取文本的全局嵌入,与时间步嵌入融合后输入模型。
-
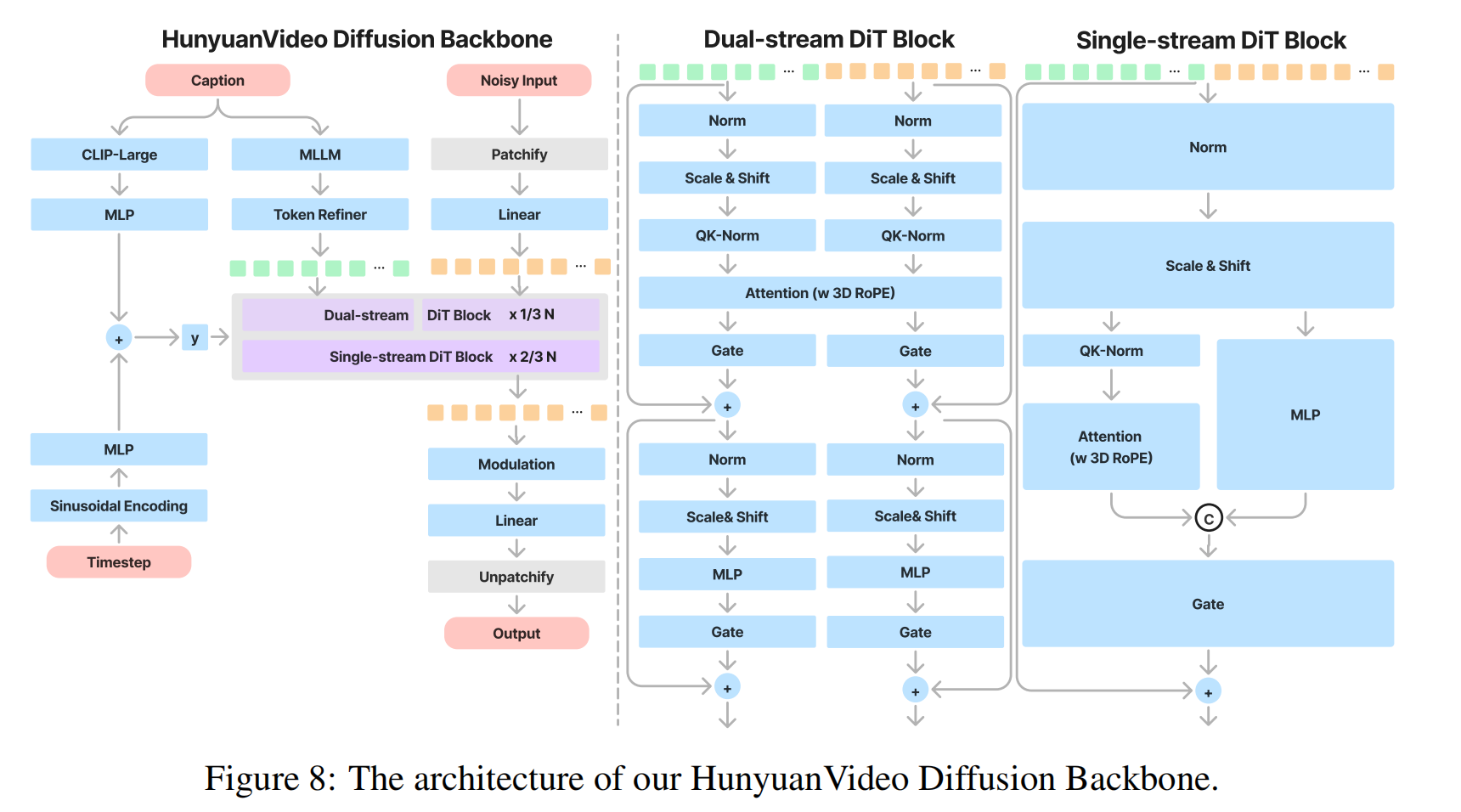
3.2.2 Model Design
-
双流阶段(Dual-stream)
-
独立处理模态:
- 视频Token流:通过多层Transformer块学习时空特征。
- 文本Token流:通过另一组Transformer块提取语言特征。
-
目的:
- 避免早期融合导致模态干扰(如文本噪声污染视觉特征)。
-
-
单流阶段(Single-stream)
-
Token拼接:将视频Token和文本Token合并为单一序列。
- 例如:
[Video_Tokens; Text_Tokens]→ 总长度2048+512=2560。
- 例如:
-
跨模态注意力:
- 通过Transformer块计算视频-文本交叉注意力,实现细粒度对齐(如物体属性与描述匹配)。
-
3.2.3 Position Embedding
-
RoPE的三维扩展
-
分通道计算:
- 将 Query/Key 的通道分为三组: d t , d h , d w d_t,d_h,d_w dt,dh,dw,对应时间T、高度H、宽度W。
-
旋转矩阵应用:
- 对每组通道分别乘以对应的旋转频率矩阵(如时间频率、空间频率)。
-
拼接与注意力:
- 合并三组通道后的Query/Key用于注意力计算,显式编码时空位置关系。
- 公式示意:
RoPE3D ( Q , K ) = Concat ( Rotate ( Q d t , T ) , Rotate ( Q d h , H ) , Rotate ( Q d w , W ) ) \text{RoPE3D}(Q,K) = \text{Concat}(\text{Rotate}(Q_{d_t}, T), \text{Rotate}(Q_{d_h}, H), \text{Rotate}(Q_{d_w}, W)) RoPE3D(Q,K)=Concat(Rotate(Qdt,T),Rotate(Qdh,H),Rotate(Qdw,W))
-
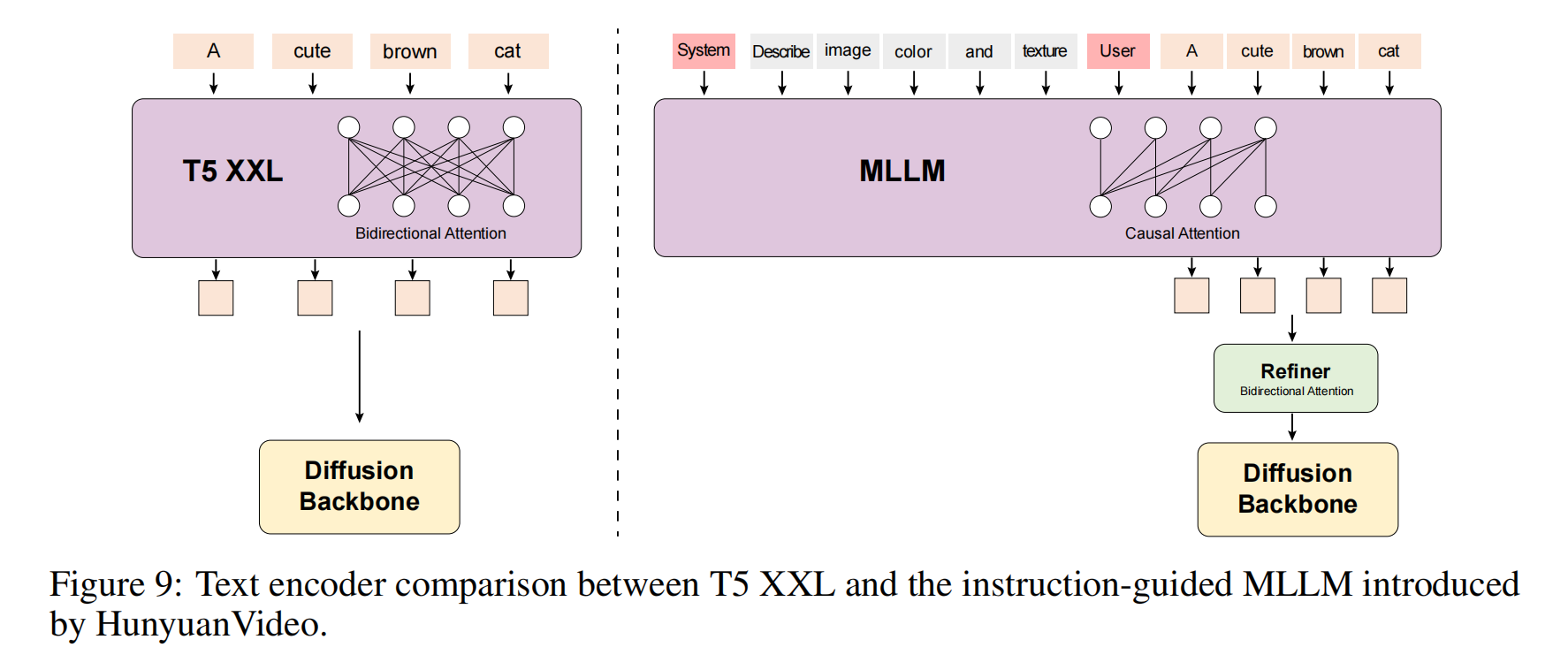
3.3 Text Encoder
-
选择MLLM的原因
-
图像-文本对齐优势:
- MLLM 经过 视觉指令微调,其文本特征在隐空间中与视觉内容对齐更佳,缓解了扩散模型“指令跟随不准”的问题(如忽略细节描述)。
-
复杂推理能力:
- MLLM 在图像细节描述(如“猫的绿色眼睛”)和逻辑推理(如“A 在 B 左侧”)上优于 CLIP 和 T5。
-
零样本学习:
- 通过添加系统指令前缀(如“生成一个视频,包含以下元素:…”),MLLM 能自动聚焦关键信息,抑制无关描述。
-
-
MLLM 的设计
-
因果注意力的局限性
-
问题:Decoder-Only 结构(如 GPT)的因果注意力只能关注历史 Token,导致文本特征缺乏全局上下文。
-
解决方案:
- 引入 双向 Token 优化器(Bidirectional Token Refiner),对 MLLM 输出的文本特征进行后处理,增强上下文感知。
-
作用:
- 弥补 Decoder-Only 模型在双向语义理解上的不足,提升提示词之间的关联性(如“红色”和“苹果”)。
-
-
-
CLIP 辅助作用
-
CLIP 特征的提取
-
输入:与 MLLM 相同的文本提示。
-
处理:
- 通过 CLIP-Large 的文本编码器生成 Token 序列。
- 取最后一个非填充 Token 的向量作为全局特征(形状
[1, D])。
-
用途:
- 作为全局条件信号,与 MLLM 的细粒度特征互补,注入 DiT 的双流和单流阶段。
-
-
CLIP的作用
-
稳定性:CLIP 的对比学习训练使其全局特征在风格控制(如“科幻”、“写实”)上更鲁棒。
-
多模态对齐:CLIP 的文本-图像对齐能力可约束 MLLM 的输出,避免生成偏离语义的内容。
-
-
3.4 Model-pretraining
3.4.1 Training Objective
HunyuanVideo 采用 Flow Matching 框架训练图像和视频生成模型,其核心思想是通过 概率密度变换 和 速度场预测,将简单分布(如高斯噪声)逐步映射到复杂数据分布(如图像/视频潜空间)。
-
Flow Matching 的核心思想
-
基本定义
-
目标:学习一个连续变换路径(Flow),将简单分布 p 0 p_0 p0(如高斯噪声)转换为数据分布 p 1 p_1 p1(如真实图像/视频的潜变量)。
-
数学形式:通过时间 t ∈ [ 0 , 1 ] t \in [0,1] t∈[0,1] 参数化的概率密度变换:
p t = Transform ( p 0 , t ) p_t = \text{Transform}(p_0, t) pt=Transform(p0,t)- 其中 p t p_t pt 是从 p 0 p_0 p0 到 p 1 p_1 p1 的中间状态。
-
-
-
训练过程的数学推导
-
样本构造
-
输入数据:从训练集采样真实潜变量 x 1 x_1 x1(通过3DVAE编码的图像/视频)。
-
噪声初始化:采样 $x_0 \sim \mathcal{N}(0, I) $。
-
时间采样:从 logit-normal 分布 采样 t ∈ [ 0 , 1 ] t \in [0,1] t∈[0,1],偏好两端 ( t ≈ 0 或 t ≈ 1 ) ( t \approx 0 或 t \approx 1) (t≈0或t≈1)以强化困难样本学习。
-
线性插值:构造中间样本 ( x_t ):
x t = t x 1 + ( 1 − t ) x 0 x_t = t x_1 + (1-t) x_0 xt=tx1+(1−t)x0
- 当 t = 0 t=0 t=0: x t = x 0 x_t = x_0 xt=x0(纯噪声)。
- 当 t = 1 t=1 t=1: x t = x 1 x_t = x_1 xt=x1(真实数据)。
-
-
速度场预测
-
真实速度(Ground Truth):
- 对线性插值路径,真实速度为:
u t = d x t d t = x 1 − x 0 u_t = \frac{dx_t}{dt} = x_1 - x_0 ut=dtdxt=x1−x0
-
模型预测:
- 神经网络 v θ v_\theta vθ 预测速度场 v t = v θ ( x t , t ) v_t = v_\theta(x_t, t) vt=vθ(xt,t)。
-
损失函数:最小化预测速度与真实速度的均方误差(MSE):
L generation = E t , x 0 , x 1 ∥ v t − u t ∥ 2 \mathcal{L}_{\text{generation}} = \mathbb{E}_{t,x_0,x_1} \| v_t - u_t \|^2 Lgeneration=Et,x0,x1∥vt−ut∥2- 物理意义:强制模型学习如何将任意 x t x_t xt 推回真实数据 x 1 x_1 x1。
-
-
-
推理过程的实现
-
从噪声生成数据
-
初始化:采样噪声 x 0 ∼ N ( 0 , I ) x_0 \sim \mathcal{N}(0, I) x0∼N(0,I)。
-
ODE求解:
-
使用一阶欧拉方法(Euler ODE Solver)数值求解:
x t + Δ t = x t + v θ ( x t , t ) ⋅ Δ t x_{t+\Delta t} = x_t + v_\theta(x_t, t) \cdot \Delta t xt+Δt=xt+vθ(xt,t)⋅Δt -
从 t = 0 t=0 t=0 到 t = 1 t=1 t=1 积分,得到最终样本 x 1 x_1 x1 。
-
-
输出:将 x 1 x_1 x1 输入3DVAE解码器,生成图像/视频。
-
-
3.4.2 Image Pre-training
-
第一阶段:256px 低分辨率训练
-
目的:建立基础语义映射(文本→图像),学习低频概念(如物体形状、布局)。
-
关键技术:
- 多长宽比训练(Multi-aspect Training):
- 避免裁剪导致的文本-图像错位(如“全景图”被裁剪后丢失关键内容)。
- 示例:256px 锚定尺寸下,支持 1:1(正方形)、16:9(宽屏)等多种比例。
- 多长宽比训练(Multi-aspect Training):
-
-
第二阶段:256px+512px 混合尺度训练
-
问题:直接微调512px会导致模型遗忘256px生成能力,影响后续视频训练。
-
解决方案:
- 动态批量混合(Mix-scale Training):
- 每个训练批次包含不同分辨率的图像(如256px和512px),按比例分配GPU资源。
- 锚定尺寸扩展:以256px和512px为基准,分别构建多长宽比桶(Aspect Buckets)。
- 动态批量大小:
- 高分辨率分配较小批量,低分辨率分配较大批量,最大化显存利用率。
- 动态批量混合(Mix-scale Training):
-
3.4.3 Video-Image Joint Training
-
数据分桶(Bucketization)
-
分桶策略:
- 时长分桶(BT buckets):如 16帧、32帧、64帧。
- 长宽比分桶(BAR buckets):如 4:3、16:9、1:1。
- 总桶数:BT × BAR(如3时长×3比例=9桶)。
-
动态批量分配:
- 每个桶根据显存限制设置最大批量(如16帧视频批量大,64帧视频批量小)。
- 训练时随机从不同桶采样,增强模型泛化性。
-
-
渐进式课程学习
训练阶段 目标 低清短视频 建立文本-视觉基础映射,学习短程运动 低清长视频 建模复杂时序 高清长视频 提升分辨率与细节质量 - 图像数据的作用:
- 缓解视频数据不足,防止模型遗忘静态场景语义(如物体纹理、光照)。
- 图像数据的作用:
3.5 Prompt Rewrite
- 训练无关的上下文重写
- 多语言适配:该模块旨在处理和理解各种语言的用户提示,确保保留意义和上下文。
- 结构标准化:该模块重述提示,使其符合标准化的信息架构。
- 术语简化:将口语或专业术语转化为生成模型熟悉的表达。
- 自修正技术(Self-Revision)
- 对比原始提示与重写结果,通过语义相似度检测和自动修正,确保意图一致性。
- 轻量化微调(LoRA)
- 基于高质量重写样本对 Hunyuan-Large 进行低秩适配器(LoRA)微调,提升重写精度和效率,支持实时处理。
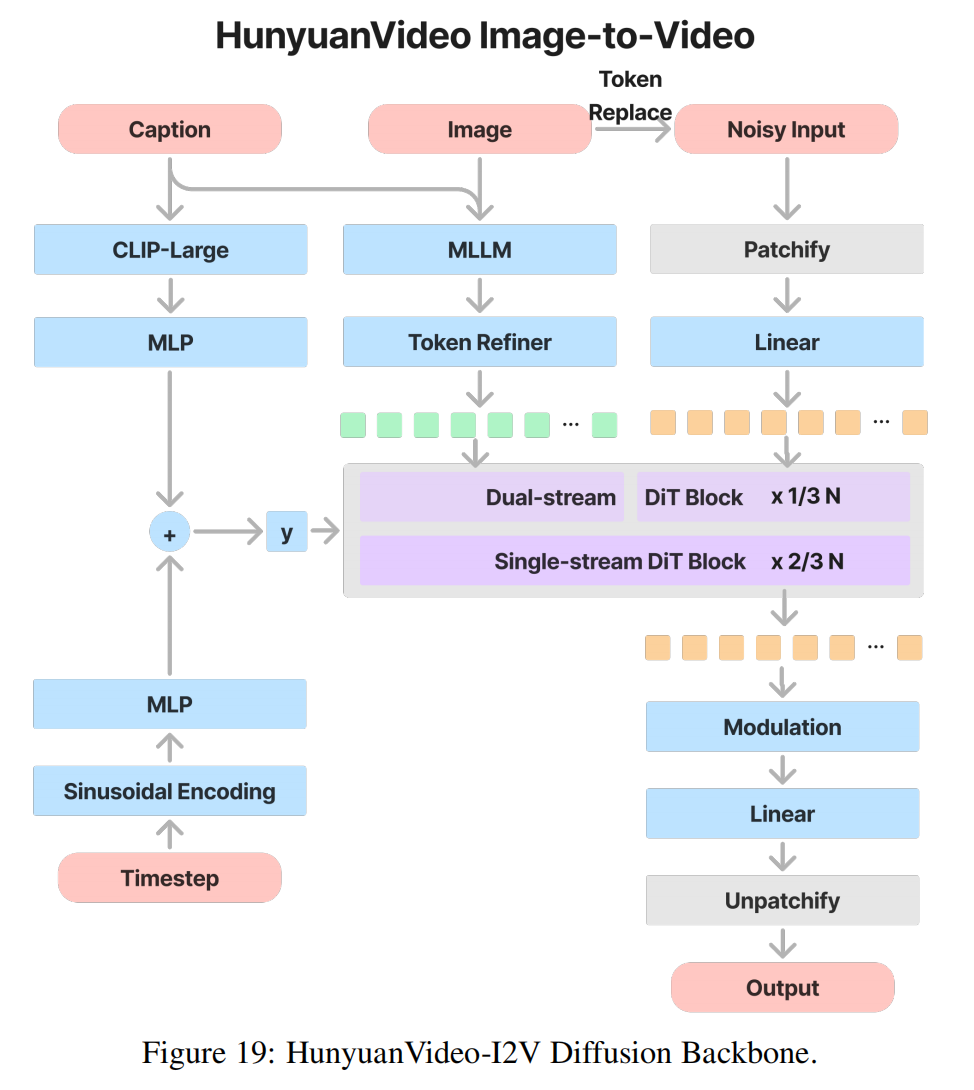
4. Image-to-Video
-
核心架构设计
-
图像潜变量替换(Token Replace)
- 输入处理:
- 将参考图像通过 3DVAE 编码器 转换为潜变量 z image z_{\text{image}} zimage(形状: C × H × W C \times H \times W C×H×W )。
- 替换首帧:在生成视频的潜变量序列中,强制将第一帧替换为 z image z_{\text{image}} zimage ,并设置其时间步 t = 0 t=0 t=0(表示完全保留图像信息)。
- 该帧参与attention机制,用于被别的帧参考;但不会参与去噪,即每个timestep都不会被更改。
- 后续帧生成:其余帧通过 T2V 的 Flow Matching 框架生成,确保运动连贯性。
- 输入处理:
-
语义图像注入模块(Semantic Image Injection)
- 多模态对齐:
- 将输入图像输入 MLLM(多模态大模型),提取语义 Token
- 将这些 Token 与视频潜变量拼接,参与 全注意力计算(Full-Attention),确保生成视频的语义与图像一致。
- 多模态对齐:
-
-
训练策略
-
预训练阶段
- 数据:使用与 T2V 相同的数据集,但将部分样本的首帧替换为图像,并添加图像描述作为附加条件。
-
下游任务微调(人像视频生成)
-
数据筛选:
- 使用 人脸和人体检测器 过滤训练视频:
- 移除超过 5 人的视频(避免群体动作干扰)。
- 移除主体过小的视频(确保主要人物清晰)。
- 人工审核保留高质量人像视频(约 200 万条)。
- 使用 人脸和人体检测器 过滤训练视频:
-
渐进式微调:
- 初始阶段:仅微调与图像注入相关的模块(如 MLLM 的投影层)。
- 后期阶段:逐步解冻更多层(如时空注意力层),平衡人像生成与通用性。
-
-