小场景大市场:猫狗识别算法在宠物智能设备中的应用
将猫狗识别算法应用于宠物智能设备是一个极具前景和价值的AIoT垂直领域。这不仅仅是简单的图像分类,而是一个集成了算法、硬件、软件和用户体验的复杂系统工程。
以下我将从核心技术原理、应用场景、技术挑战与解决方案、以及未来趋势四个方面进行分析。
一、核心技术原理与算法选型
猫狗识别算法的核心是计算机视觉(CV) 中的图像分类和目标检测技术。
1. 基础任务:
- 图像分类 (Image Classification): 回答“这张图片里是猫还是狗?”的问题。这是最基础的应用。
- 目标检测 (Object Detection): 在复杂场景(如客厅)中,不仅要识别出是猫还是狗,还要定位出它们的位置(画出边界框)。这对于设备判断宠物是否进入特定区域(如禁止进入的厨房)至关重要。
- 个体识别 (Re-Identification): 进阶需求。回答“这是不是我家的那只猫/狗?”的问题。这需要更精细的特征提取,如面部特征、花纹、体型等,用于多宠物家庭区分不同个体。
2. 主流算法模型:
- 轻量化卷积神经网络 (Lightweight CNN): 这是嵌入式设备的主流选择。考虑到智能设备算力和功耗的限制,不能直接使用大型模型(如ResNet-152)。业界常采用:
- MobileNet系列 (V1/V2/V3): Google推出,专为移动和嵌入式视觉应用设计,采用深度可分离卷积极大减少计算量和参数。
- ShuffleNet系列: 通过通道混洗操作,在保持精度的同时进一步降低计算复杂度。
- SqueezeNet: 模型极轻,参数少,非常适合极端资源受限的环境。
- Transformer-based 模型 (如ViT): 在云端处理或高端设备上,Vision Transformer展现了强大的性能,但计算需求高,目前较少用于终端设备。
- YOLO (You Only Look Once) / SSD (Single Shot MultiBox Detector): 这是实现实时目标检测的首选算法。它们速度快、精度高,非常适合需要实时响应的智能设备(如宠物监控摄像头)。
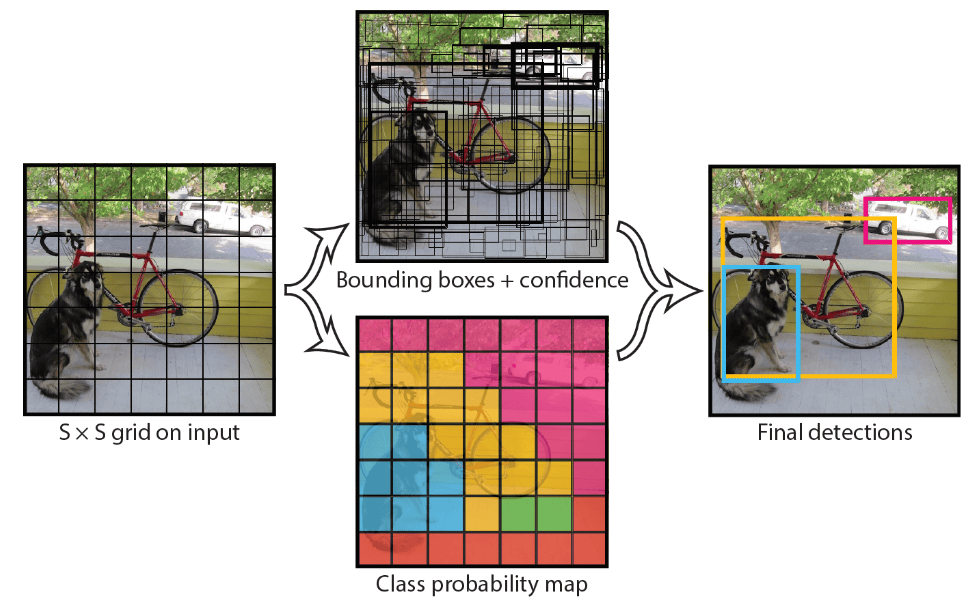
YOLO算法
3. 工作流程:
- 数据采集与预处理: 设备摄像头捕捉图像/视频流 → 图像缩放、归一化、增强(增强鲁棒性)。
- 模型推理: 预处理后的数据输入到部署在设备端(或云端)的轻量化CNN或YOLO模型中进行推理。
- 结果输出: 模型输出分类结果(猫/狗/背景)、置信度分数以及位置信息(如果用了检测模型)。
- 触发动作: 设备根据识别结果执行预定义策略,如发送通知、录制视频、播放声音、投放零食等。
二、 在宠物智能设备中的具体应用场景
算法必须与具体的硬件产品结合,才能创造价值。
1.智能喂食器 (Smart Pet Feeder):
- 应用: 通过摄像头识别靠近的宠物是猫还是狗,甚至具体是哪一只。
- 价值: 实现精准投喂。可以为不同宠物定制不同的食谱和份量,防止宠物偷吃或抢食。对于多宠物家庭是刚需。
2.智能摄像头 (Pet Monitoring Camera):
- 应用: 实时检测宠物出现、识别宠物种类和行为(如拆家、嚎叫)。
- 价值: 安全看护与行为分析。当识别到宠物进入危险区域(如阳台)或出现异常行为时,立即向主人手机发送警报。可以生成“宠物每日报告”,汇总猫狗的活动轨迹。
3.智能门 (Pet Door/Flap):
- 应用: 在门上的摄像头识别试图通过的动物。
- 价值: access control。只允许自家的猫/狗通过,防止野生动物或其他邻居的宠物进入。可以设置权限,例如只允许猫出去,但不允许狗出去。
4.智能玩具 (Interactive Toys):
- 应用: 识别宠物的靠近和互动动作(如扑抓、拍打)。
- 价值: 触发玩具的响应(如激光点移动、发出声音),实现人宠远程互动或自主陪玩,缓解宠物分离焦虑症。
智能逗猫车
三、技术挑战与工程化解决方案
1.计算资源受限 (Limited Computing Power):
- 挑战: 智能设备通常采用MCU或低算力SoC,内存和功耗严格受限。
- 解决方案:
- 模型轻量化: 使用上述MobileNet等轻量模型,并结合剪枝 (Pruning)、量化 (Quantization) 技术(如INT8量化),大幅减少模型体积和计算量。
- 模型部署优化: 使用TensorRT、TFLite、ONNX Runtime等推理框架,对模型进行深度优化,提升在特定硬件上的推理速度。
- 端云协同 (Edge-Cloud Collaboration): 复杂识别(如个体识别)或高精度分析可上传至云端处理,设备端只负责简单的触发检测和预处理,平衡响应速度和能力。
- 算法优化:快瞳科技MSA算法针对主流芯片平台进行深度优化,可在低功耗设备上流畅运行,显著降低硬件厂商的集成门槛。
2.环境复杂性 (Complex Environments):
- 挑战: 光照变化(过暗/过亮)、遮挡、拍摄角度怪异、背景杂乱、宠物形态多变(睡觉、奔跑、背对镜头)。
- 解决方案:
- 数据增强 (Data Augmentation): 在模型训练阶段,使用大量模拟真实环境的数据(如不同亮度、角度、背景的猫狗图片)进行训练,提升模型泛化能力。快瞳采用自研的FaNl-pet深度学习框架,通过MSA算法提取关键面部特征点,即使在低光照条件下仍能保持高精度识别。
- 多模态融合 (Multi-Modal Fusion): 结合红外摄像头解决夜间识别问题;结合PIR传感器先触发设备,再进行图像识别以节省功耗。
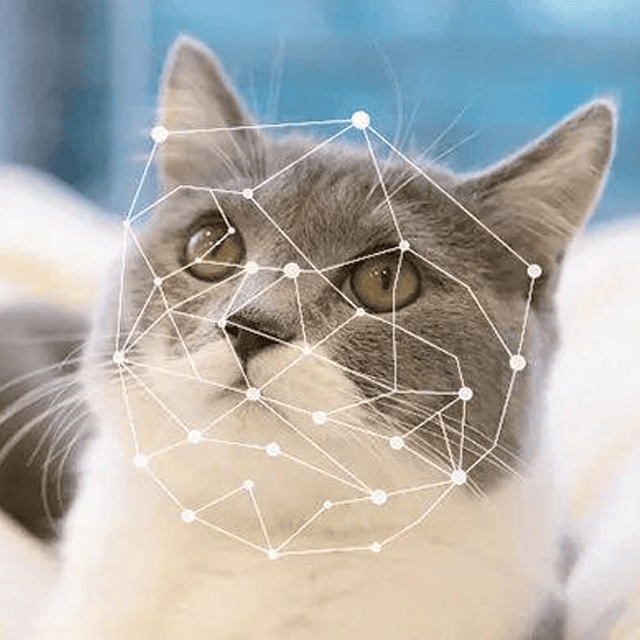
快瞳算法提取面部特征点
3.实时性要求 (Real-time Requirement):
- 挑战: 如智能门需要毫秒级响应,不能有延迟。
- 解决方案: 选择YOLO等单阶段检测器,并 heavily 优化其嵌入式版本(如YOLO-Fastest),确保推理速度达到30FPS以上。
4.数据隐私与安全 (Data Privacy & Security)
- 挑战: 视频数据涉及用户家庭隐私。
- 解决方案: 端侧推理是首选,让数据在本地设备上处理,无需上传云端,从根本上保护隐私。只有在用户明确需要云端备份或高级功能时,才进行加密传输。
四、未来趋势与发展方向
- 从识别到行为理解: 未来不仅是识别“猫”,而是识别“猫在抓沙发”或“狗在焦虑地踱步”。这需要视频理解和行为分析算法,价值更大。
- 多模态融合深入: 结合声音传感器(麦克风),通过识别犬吠、猫叫声来综合判断宠物状态(如饥饿、痛苦),提升识别准确率和场景理解深度。
- 低功耗与永远在线 (Always-On): 通过唤醒词或硬件触发机制,让大部分时间设备处于超低功耗的“监听”状态,只有检测到可能的目标时才启动完整识别流程,极大延长电池寿命。
- 个性化与自适应学习: 设备能够持续学习并适应自家宠物的独特特征(如花纹、行为习惯),越用越精准,形成个性化的“宠物数字画像”。
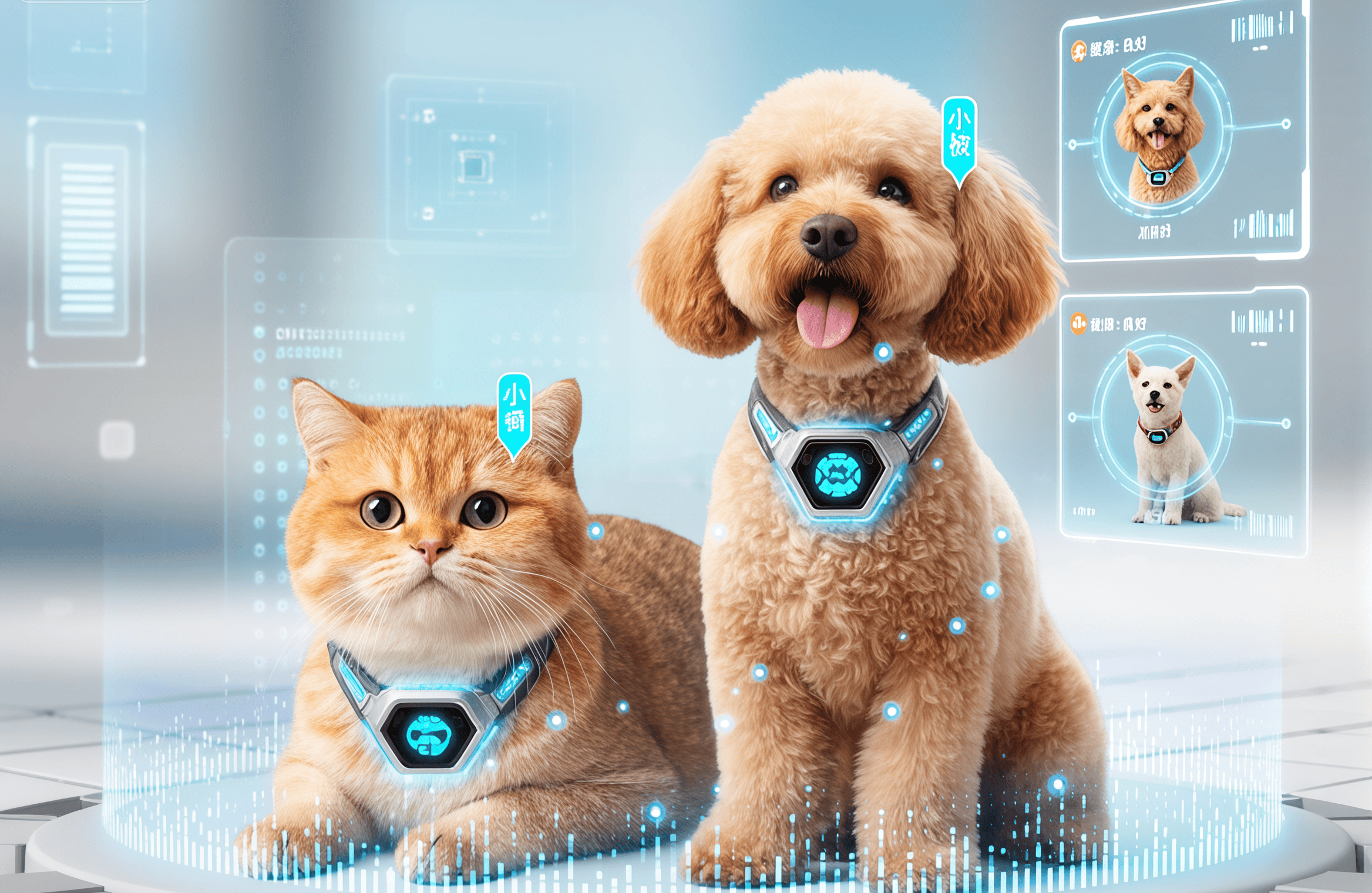
未来感宠物设备
总结
将猫狗识别算法应用于宠物智能设备,技术栈上需要计算机视觉算法、嵌入式软件工程、硬件设计的紧密协同。成功的产品不仅仅是算法准确率高,更是要在成本、功耗、速度、用户体验之间找到最佳平衡点。当前技术已足够支撑起丰富的应用场景,而未来的竞争将更多地集中在垂直数据的积累、算法与硬件的深度融合、以及对宠物行为更深层次的AI理解上。这是一个典型的“小场景,大市场”的AIoT落地典范。