无人机电机与螺旋桨的匹配原理及方法(一)
无人机(UAV)的动力系统是其核心组成部分,而电机与螺旋桨的匹配直接影响飞行性能、续航时间和稳定性。那么电机如何匹配合适大小的螺旋桨呢?
 图1 极飞P150(图片来自极飞官网)
图1 极飞P150(图片来自极飞官网)
本文将系统性地探讨无人机电机与螺旋桨的匹配原理,涵盖电机特性、螺旋桨动力学、匹配计算方法、实验验证及优化策略。全文共分为六大部分,旨在为无人机设计者、工程师及研究人员提供全面的理论指导和实践参考。
图2 好盈X15动力(图片来自好盈官网)
为什么要进行电机和螺旋桨匹配
无人机在军事、农业、航拍和物流等领域广泛应用,动力系统的效率直接影响其任务执行能力。电机与螺旋桨的匹配是动力系统设计的核心问题,不合理的匹配会导致效率低下、过热甚至飞行失败。匹配的电机和螺旋桨可以最大程度上提高无人机的续航能力、优化动力系统效率、降低电机和螺旋桨的机械损耗、增强飞行稳定性。
无人机电机类型及参数
电机类型与特性
无人机常用电机包括:
有刷直流电机(Brushed DC):结构简单,但效率低,适用于小型无人机。
图3 好盈有刷电机(图片来自好盈官网)
无刷直流电机(BLDC):高效率、长寿命,广泛应用于多旋翼无人机。
图4 T-MOTOR无刷电机(图片来自T-MOTOR官网)
PS:无刷电机 vs有刷电机:无刷电机扭矩大,适用于大螺旋桨;有刷电机转速高,适用于高速飞行。
电机关键参数
KV值(转速/电压):表示每伏特电压下的空载转速(RPM/V),影响螺旋桨选择。
最大电流与功率:决定电机承载能力。
扭矩-转速曲线:反映电机在不同负载下的输出特性。
无人机螺旋桨参数及动力学分析
螺旋桨基本参数

图5 豪克螺旋桨(图片来自豪克官网)
直径(D):影响推力与效率。
螺距(P):决定螺旋桨每转理论前进距离。
桨叶数(2叶、3叶、4叶):桨叶数越多,推力越大,但效率可能降低。
图6 2叶、3叶、4叶螺旋桨(图片来自豪克官网)
螺旋桨性能模型
推力公式:

CT:推力系数
ρ:空气密度
n:转速
功率消耗:

CP:功率系数
关于螺旋桨性能公式的解释:从以上2个公式可以看出螺旋桨的拉力/推力与螺旋桨的转速平方和直径的4次方呈正比例关系,螺旋桨的输入功率与螺旋桨的转速3次方和直径的5次方呈正比例关系。这说明随着螺旋桨直径的增加,拉力和功率都是指数级的增加,这对电机的选型影响重大,我们也可以从这个公式中反推每个电机可以匹配的螺旋桨型号。
电机与螺旋桨的匹配方法
电机与螺旋桨的匹配原则
KV值与螺旋桨负载匹配:
低KV电机 + 大直径螺旋桨 → 高扭矩,适用于低速长航时无人机
高KV电机 + 小直径螺旋桨 → 高转速,适用于高速竞速无人机
功率匹配:电机最大功率需大于螺旋桨需求功率
匹配计算流程
确定无人机需求(推力、续航、飞行速度)
选择电机KV值(根据螺旋桨尺寸和转速需求)
计算螺旋桨负载(推力与功率消耗)
验证电机是否满足(电流、温度、效率)
实验验证与案例
实验基本情况
我们以一台起飞重量5kgf的四轴常规布局无人机为例,该无人机起飞重量5kgf,理论单轴续航拉力为1.25kgf。
图7 大疆inspire(图片来自大疆官网)
我们应当选择50%-60%油门下拉力为1.25-1.3kgf左右的动力套装来作为无人机的动力,通过查询厂家的数据我们得到以下数据:
油门50%-60%:螺旋桨型号:P15*5.0,转速:4700,拉力:1250g,扭矩0.225NM,桨力效11.3g/w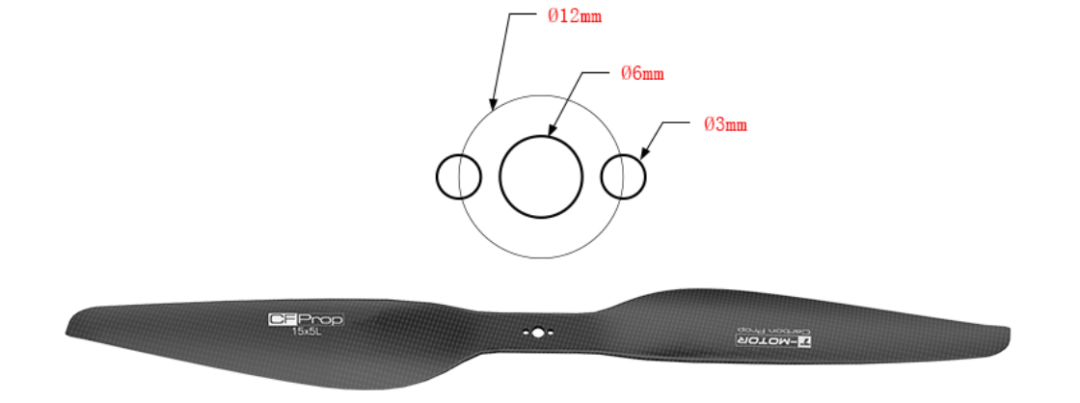
图8 P15*5.0螺旋桨(图片来自T-MOTOR官网)
油门50%-60%:螺旋桨型号:P16*5.4,转速:4150,拉力:1250g,扭矩0.24NM,桨力效12.0g/w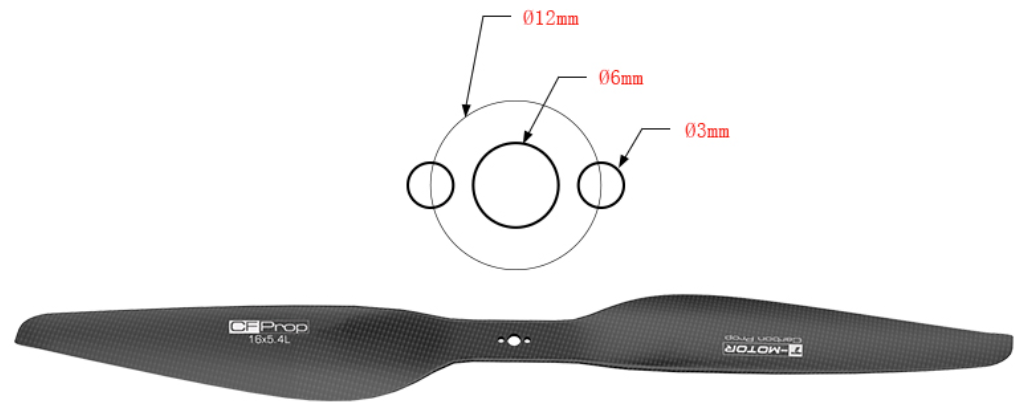
图9 P16*5.4螺旋桨(图片来自T-MOTOR官网)
油门50%-60%:螺旋桨型号:P17*5.8,转速:3650,拉力:1250g,扭矩0.25NM,桨力效13.1g/w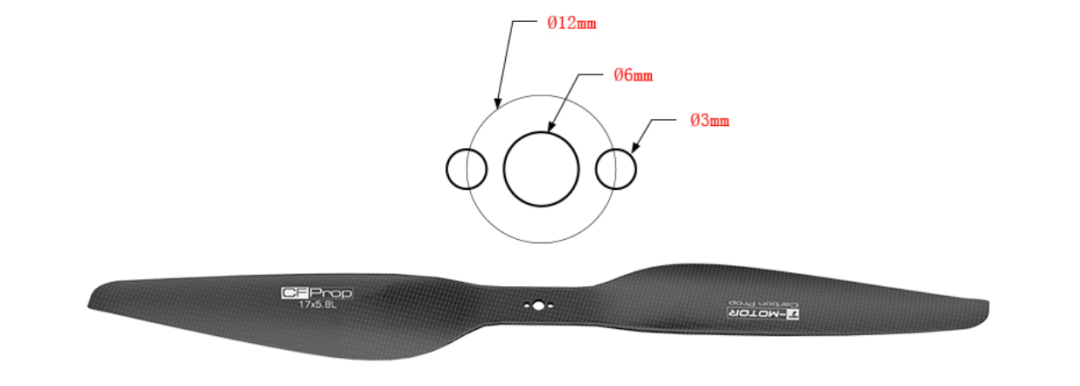
图10 P17*5.8螺旋桨(图片来自T-MOTOR官网)
备注:以上数据由无人机动力测试系统获得
桨叶匹配理论
根据以上数据,我们的无人机可以选择15-17inch的螺旋桨来作为选择范围,可以看到我们选择的桨叶力效范围在11-13左右,选择这个范围既参考了螺旋桨的设计转速范围,又参考了较为合适的力效范围。
使用比正常螺旋桨尺寸小的情况:
在一些特殊情况下,如果设计要求限制了无人机的整体尺寸,使用15inch的螺旋桨并不能满足尺寸要求,这时就要使用14inch或者13inch的螺旋桨来实现巡航1.25kg的升力需求,但应当注意,如果要小于13inch,使用12或者11inch的螺旋桨,此要求已经超出了螺旋桨的设计额定负载,如果一定要使用,则需要重新设计螺旋桨的结构强度以满足需要或者使用共轴双桨动力。
使用比正常螺旋桨尺寸大的情况:
在一些长航时无人机的设计中,很多时候会使用大尺寸的螺旋桨来提高系统力效,从而提高航时。这里也应当注意,使用大尺寸的螺旋桨时,应尽量使用质量较轻的桨叶,从而降低转动惯量,降低控制桨叶带来的额外功率。同时不能使用尺寸过大的螺旋桨,使用尺寸过大的螺旋桨一是桨叶增大带来的质量增加反而会增加飞机的结构重量,二是过低的巡航转速会带来失控的风险。
电机选型
我们参考TMOTOR官网的数据参数,得到MN41系列电机针对15-17inch螺旋桨适配较为合适,其中具体有如下型号:
MN4110-KV300/340/400 MN4112--KV320/420 MN4116-KV340/450

图11 MN4110/MN4112/MN4116电机(图片来自T-MOTOR官网)
针对如上7个型号,我们的选择方向取决于飞行器的使用场景,因为此7个型号与我们想要选用的3款螺旋桨都是适配的。
对于轻载荷或固定载荷的无人机,我们首选MN4110电机来作为首选,因为电机质量较轻,对整机结构设计有好处。对于KV值的选择又是优先选择300KV的型号,搭配16-17inch的螺旋桨即可。
对于机动性要求高机型,我们首选中等型号高KV值的电机,如MN4112-KV420的电机搭配15inch的螺旋桨。
对于载荷变化范围较大,工作环境较为恶劣的情况,我们可以选择质量较大的电机作为动力源,此电机的可靠性较高,同功率下发热更低,更适合恶劣环境,所以可以选择MN4116-KV450搭配15inch螺旋桨或者MN4116-KV340搭配17inch螺旋桨。
动力测试台验证(匹配选型合理性)
测试台的核心验证能力
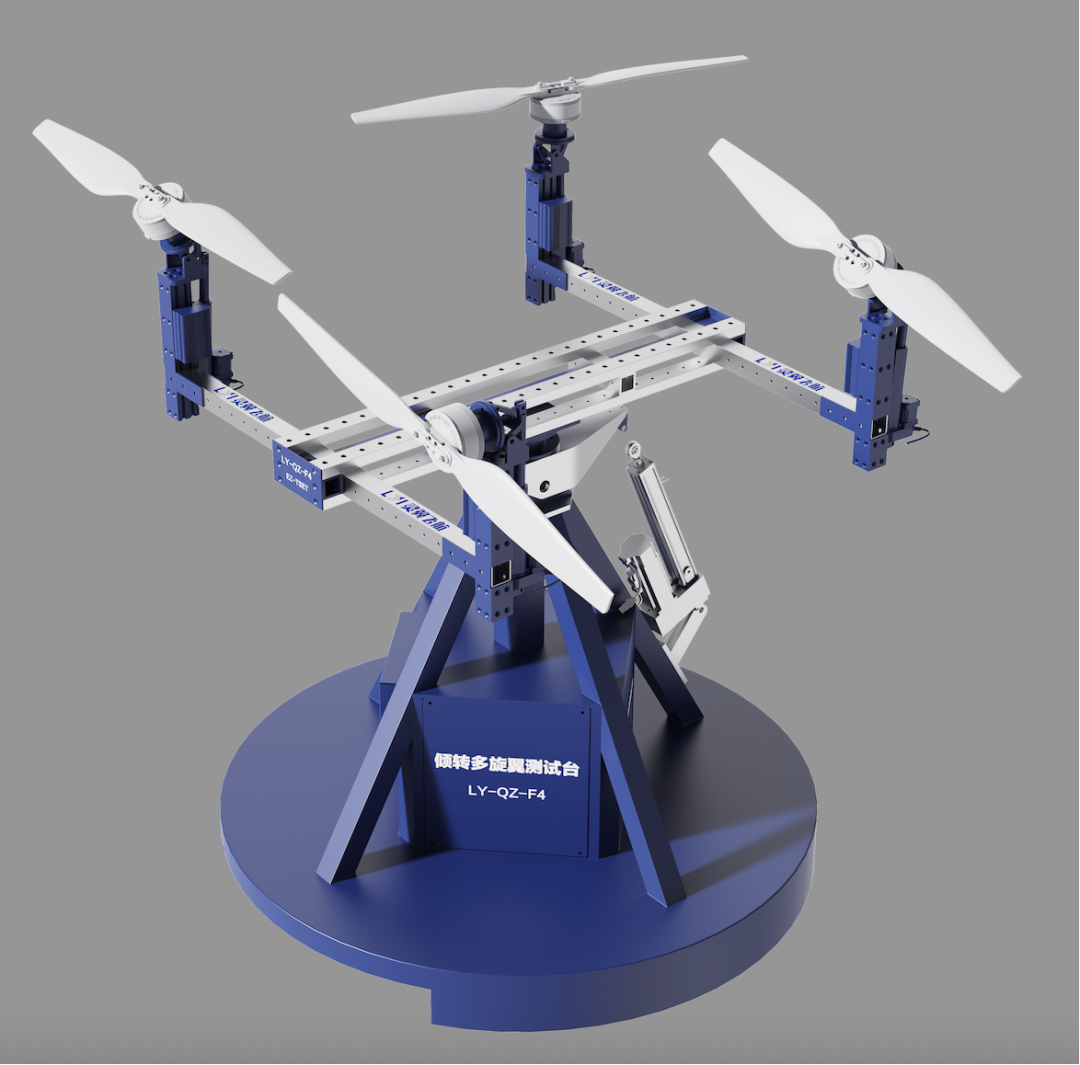
图12 LY-QZ-F4测试台
测试台功能介绍
无人机动力测试系统是专为无人机动力开发的测试系统。配备拉力、扭矩、电压、电流、温度、转速等传感器。可以实现拉力、扭矩、电压、电流、温度、转速等数据的测量。
无人机动力测试系统配备MET系列测试软件。MET测试软件与动力系统测试台进行连接,可以实现对无人机动力的测量和数据加工。
测试台逻辑运行图
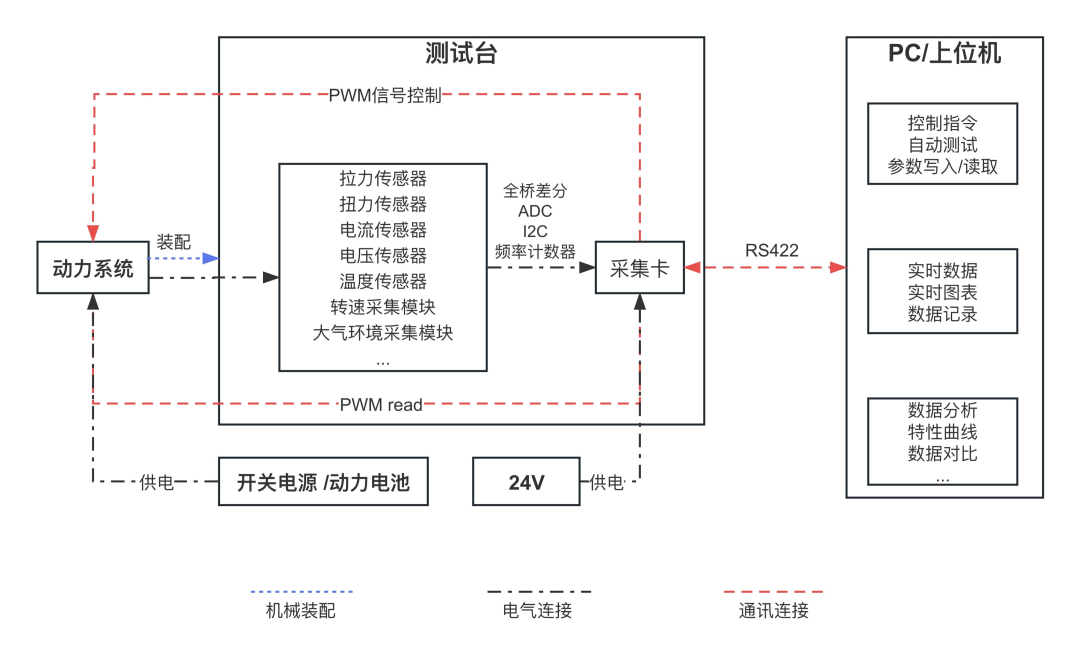
图13 测试台逻辑运行图
测试台软件界面
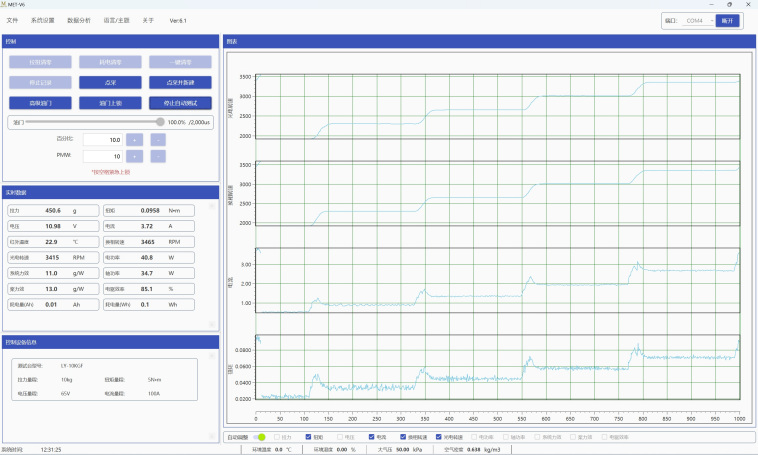
图14 测试台软件主界面
测试台测试数据
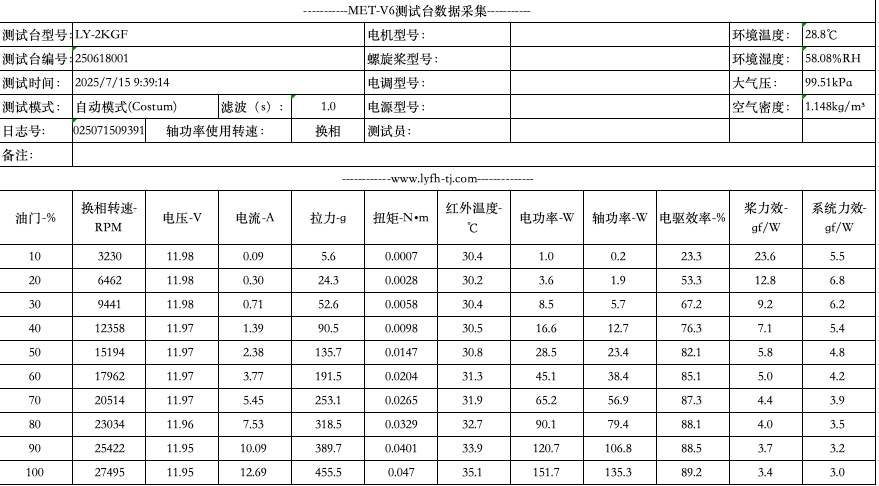
图15 测试台测试数据
全工况动力特性测绘
静态测试:测量电机-螺旋桨组合的推力-电流-转速三维关系曲线,识别最佳效率区间(如某组合在6000RPM时效率达85%)。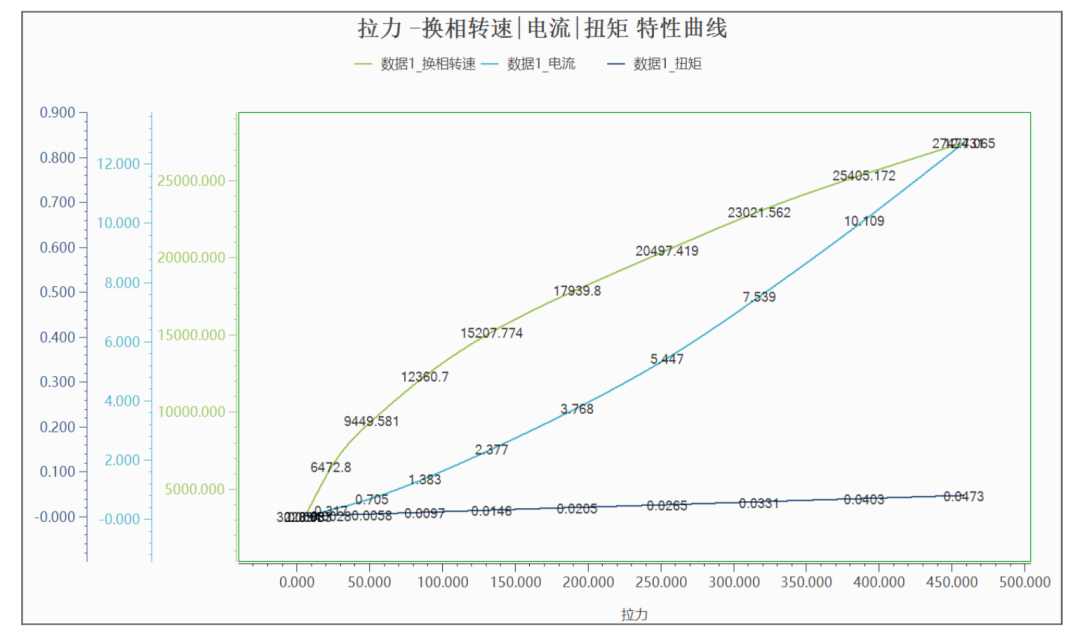
图16 拉力-转速/电流/扭矩特性曲线
动态测试:模拟爬升/俯冲等瞬态过程,记录响应时间(优质动力系统阶跃响应应<50ms)。
动力选型合理性判据
测试指标 | 合格标准 | 典型问题案例 |
效率匹配度 | 巡航点效率≥80% | 某物流无人机因效率仅68%导致续航缩水23% |
热安全性 | 满负载温升≤80℃(H级绝缘) | 电机绕组局部过热(实测142℃)引发退磁 |
动态响应 | 10%-90%推力建立时间<100ms | 响应延迟导致姿态失控坠毁 |
振动噪声 | 轴向、径向振动<0.5g RMS | 桨叶共振引发图传信号干扰 |
表1 动力选型匹配表
典型测试流程
基础性能测试
扫描0-100%油门区间,绘制推力-功率曲线
识别效率拐点(如某竞速电机在85%油门时效率骤降12%)
极限工况测试
持续过载测试(120%标称功率运行5分钟)
急加减速循环(50次/min)检验轴承与绕组耐久性
测试数据应用案例
农业无人机选型优化
问题:原配置(X8电机+32寸桨)在满载喷洒时电机温度达92℃
测试台发现:
螺旋桨挥舞变形导致效率下降18%
电机KV值偏高(180KV→建议改用150KV)
改进后:
工作温度降至71℃
作业效率提升27%
结论:动力测试台可量化揭示选型缺陷,避免“空中试错”的高成本风险。建议在原型机阶段完成≥50小时台架测试,关键参数达标后再进入飞行测试阶段。