当前位置: 首页 > web >正文 PCL 平面特征点提取 web 2025/8/14 2:12:46 文章目录 一、简介 二、实现代码 三、实现效果 参考资料 一、简介 点云中存在这各种各样的几何特征,这里基于每个点的邻域协方差来获取该点的所具有的基础几何特征(如下图所示),这样的做法虽然不能很好的提取出点云中的各个部分,但却是可以作为一种数据预处理手段。 CloudCompare中也提供了计算这些特征的方法,这里我们使用其内置的算法获取我们所需要的特征值。 为了确定上述公式没有问题,这里也同时查看了一下CloudCompare中的做法: 二、实现代码 查看全文 http://www.xdnf.cn/news/17287.html 相关文章: IntelliJ IDEA 2025.1.4.1 中文版 Sklearn 机器学习 数据聚类 DBSCAN聚类算法的异常点 在 Visual Studio Code 中免费使用 Gemini 2.5 Pro API JDK9+ Method.class.getDeclaredFields() Method实例将不能再直接通过反射修改 GaussDB 数据库架构师修炼(六)-2 集群工具管理-重建备库 三、Istio流量治理(二) java 之 继承 【0基础PS】PS工具详解--直接选择工具 秋招笔记-8.6 【2025CVPR-目标检测方向】FIRE:通过频率引导重建误差对扩散生成的图像进行鲁棒检测 内核链表、栈区、队列 微型导轨:智能家居抽屉的智能化应用 Kafka-exporter采集参数调整方案 C语言:指针(1-2) 令牌桶限流算法 蚊子咬人问题何时休:深度学习引领智能灭蚊新时代 【C/C++】形参、实参相关内容整理 SpringBoot 整合Langchain4j 对接主流大模型实战详解 AI Infra与LLM的联系与差异 《Transformer黑魔法Mask与Softmax、Attention的关系:一个-∞符号如何让AI学会“选择性失明“》 【React 插件】@uiw/react-md-editor 使用教程:从基础使用到自定义扩展 【自动驾驶】《Sparse4Dv3 Advancing End-to-End 3D Detection and Tracking》论文阅读笔记 [科普] 从单核到千核:Linux SMP 的“演化史”与工程细节 MySQL数据库索引及底层数据结构 16-DS18B20-±0.5℃精度-12bitADC--55°C ~ +125°C 如何测试一个机器是大端还是小端 如何解决网页视频课程进度条禁止拖动? 查看ubuntu server 的基本信息 ubuntu 22.04 中安装python3.11 和 3.11 的 pip 自然语言处理的相关概念与问题
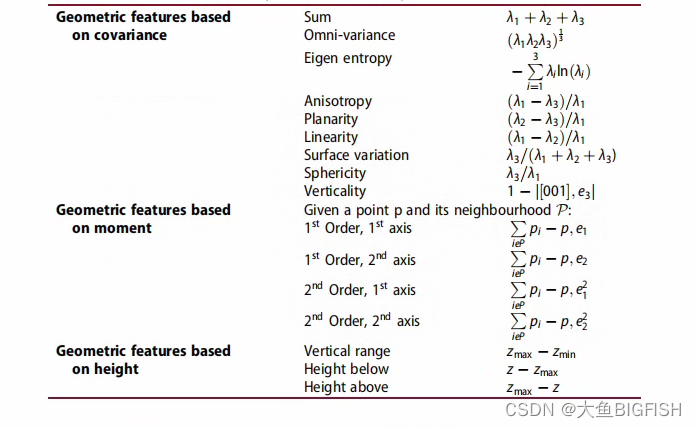
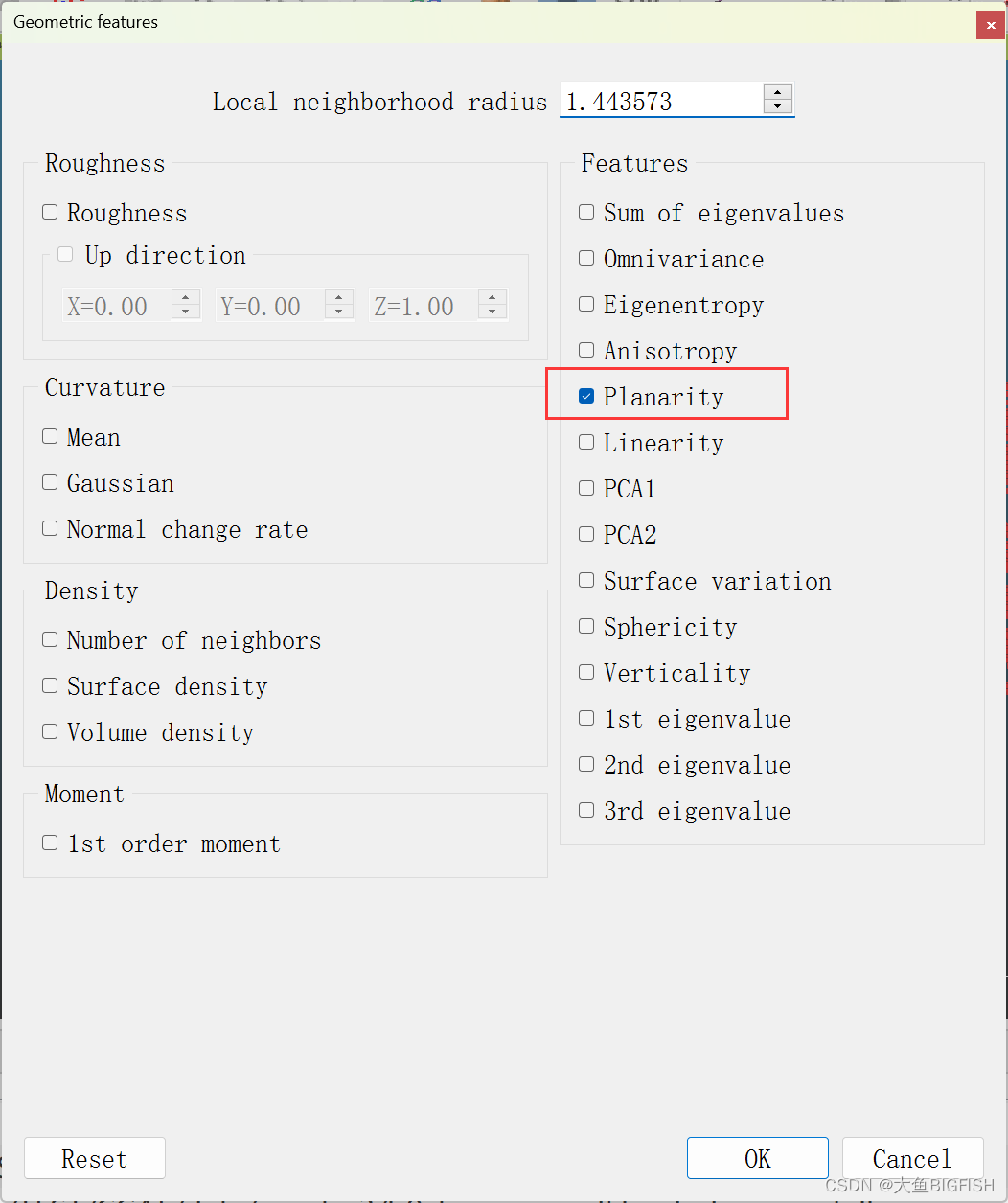
文章目录 一、简介 二、实现代码 三、实现效果 参考资料 一、简介 点云中存在这各种各样的几何特征,这里基于每个点的邻域协方差来获取该点的所具有的基础几何特征(如下图所示),这样的做法虽然不能很好的提取出点云中的各个部分,但却是可以作为一种数据预处理手段。 CloudCompare中也提供了计算这些特征的方法,这里我们使用其内置的算法获取我们所需要的特征值。 为了确定上述公式没有问题,这里也同时查看了一下CloudCompare中的做法: 二、实现代码