SEA-RAFT:更简单、更高效、更准确的RAFT架构
SEA-RAFT:更简单、更高效、更准确的RAFT架构
- iterative refinement
- Mixture-of-Laplace Loss
- Direct Regression of Initial Flow
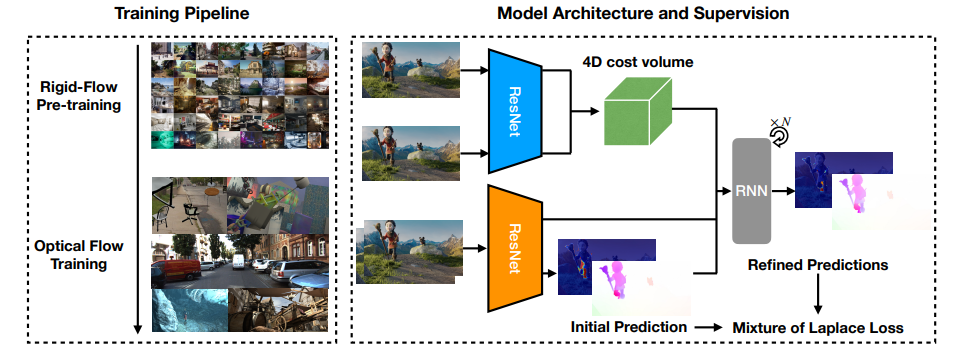
- Large-Scale Rigid-Flow Pre-Training
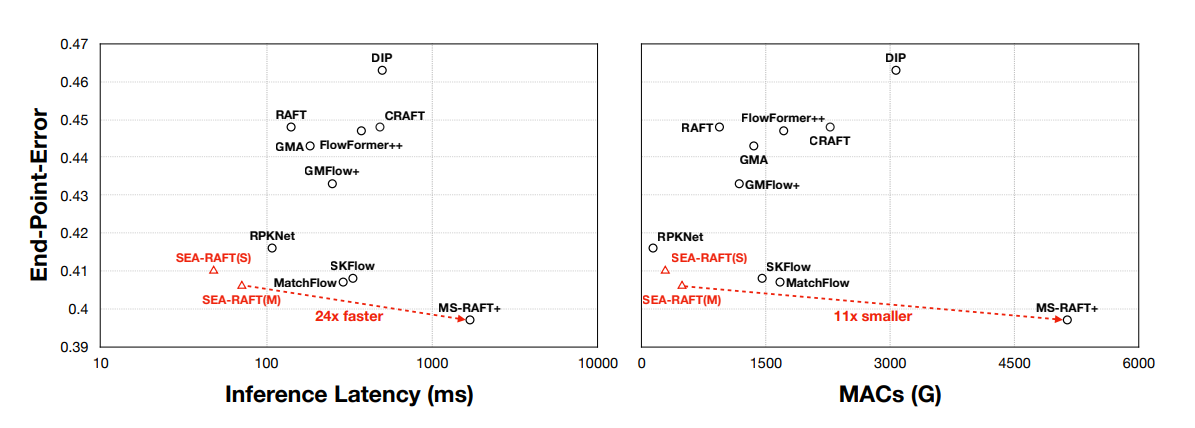
这次带来一篇光流估计工作 SEA-RAFT的论文精读。 SEA-RAFT同样出自普林斯顿大学Jia Deng团队,可以看作是 RAFT的增强版。在Spring benchmark上达到了SOTA(3.69的EPE和0.36的1-pixel outlier rate),推理速度也是目前最高效方法的2.3x。其中, SEA-RAFT的轻量版模型速度大概是 RAFT的3x,基于RTX3090平台可以达到21fps@1090p。
作者把SEA-RAFT的提升归功于以下三点:
New training loss: Mixture of Laplace(MoL)
SEA-RAFT没有使用绝对loss(比如L1,EPE等),而是预测MoL分布的参数,达到预测结果与GT flow之间的对数似然最大化。实验证明,MoL减少了对模糊情况的过拟合,提高了泛化能力。
Regress an initial flow Directly
通常,基于RAFT的方法会把光流初始化为0,然后通过多次迭代估计得到最终光流。SEA-RAFT选择直接使用context encoder预测初始光流,这种改动只增加了少量的计算开销,但是却极大地减少了迭代次数,推理效率提升明显(RAFT的迭代部分确实比较占资源)。
Rigid-motion pre-training
在TartanAir数据集上pre-train可以显著提升模型的泛化性,尽管TartanAir里的数据是由静态场景的相机运动产生的,光流多样性有限。
另外,作者额外提了一下:SEA-RAFT里提出的这些改动与RAFT-Style的方法是正交的关系,即改动可以比较容易地替换掉原先的模块。比如,模型结构(标准resnet替换feature encoder和context encoder,rnn替换gru等)
下面针对以上三点进行详细的描述:
iterative refinement
整体架构上延续了RAFT的做法,具体地,
给定两张连续的RGB图片I1I_1I1和I2I_2I2,I1I_1I1和I2I_2I2分别输入feature encoder,得到两张低分辨率的feature map:F(I1)F(I_1)F(I1)和F(I2)∈Rh×w×DF(I_2)\in R^{h\times w\times D}F(I2)∈Rh×w×D,然后I1I_1I1作为context encoder的输入,经过计算得到C(I1)∈Rh×w×DC(I_1)\in R^{ h\times w\times D}C(I1)∈Rh×w×D。
根据向量内积计算相似性的原理,基于F(I1)F(I_1)F(I1)和F(I2)F(I_2)F(I2)创建了一个4D的相似性矩阵金字塔[Vk][V_k][Vk]。具体计算逻辑如下:
- Reshape
F(I1)∈Rh×w×D⟶F(I1)∈R(h×w)×DF(I_1)\in R^{h\times w\times D} \longrightarrow F(I_1)\in R^{(h\times w)\times D}F(I1)∈Rh×w×D⟶F(I1)∈R(h×w)×D
F(I2)∈Rh×w×D⟶F(I2)∈R(h×w)×DF(I_2)\in R^{h\times w\times D} \longrightarrow F(I_2)\in R^{(h\times w)\times D}F(I2)∈Rh×w×D⟶F(I2)∈R(h×w)×D
- Matrix multi
V=F(I1)∗F(I2)TV = F(I_1) * F(I_2)^TV=F(I1)∗F(I2)T
- 构建4D相似性矩阵金字塔
Vk=AvgPool2D(V,2k){V_k}=AvgPool2D(V, 2^k)Vk=AvgPool2D(V,2k)
所以,4D相似性金字塔里每个矩阵的shape为:
Vk∈Rh×w×(h2k)×(w2k)V_k \in R^{h\times w \times (\frac{h}{2^k}) \times (\frac{w}{2^k})}Vk∈Rh×w×(2kh)×(2kw)
代码示例:
def corr(fmap1, fmap2, num_head):batch, dim, h1, w1 = fmap1.shapeh2, w2 = fmap2.shape[2:]fmap1 = fmap1.view(batch, num_head, dim // num_head, h1*w1)fmap2 = fmap2.view(batch, num_head, dim // num_head, h2*w2) corr = fmap1.transpose(2, 3) @ fmap2corr = corr.reshape(batch, num_head, h1, w1, h2, w2).permute(0, 2, 3, 1, 4, 5)return corr / torch.sqrt(torch.tensor(dim).float())
前两个维度始终保持最高分辨率,只在后两个维度上进行下采样。下采样是为了增加感受野,希望模型能够关注快速运动的物体,同时还能减小计算量;而前两个维度保持高分辨率可以保留更多有用信息,有利于模型关注学习较小的运动物体。
在RAFT的架构里,h和w设置为原始输入分辨率的1/8,4D相似性金字塔的层数设置为4,SEA-RAFT保留了这种配置。
在RAFT的架构采取了迭代式逐渐优化要预测的flow vector。初始flow vector设置为全0,即没有运动。每一次迭代时,使用当前的flow vector和一个查找半径rrr在4D相似性金字塔上提取运动特征。运动特征随即会被送入一个运动编码器MotionEncoder进一步提取运动信息。
查找半径rrr其实是一个三维的offset map,作用在上一次迭代输出的flow vector上。
假设r=2r=2r=2,offset map如下:
[(−2,−2),(−2,−1),(−2,0),(−2,1),(−2,2)(−1,−2),(−1,−1),(−1,0),(−1,1),(−1,2)(0,−2),(0,−1),(0,0),(0,1),(0,2)(1,−2),(1,−1),(1,0),(1,1),(1,2)(2,−2),(2,−1),(2,0),(2,1),(2,2)]\begin{bmatrix} (-2,-2) , (-2,-1) , (-2,0) , (-2,1) , (-2,2)\\ (-1,-2) , (-1,-1) , (-1,0) , (-1,1) , (-1,2) \\ (0,-2) , (0,-1) , (0,0) , (0,1) , (0,2) \\ (1,-2) , (1,-1) , (1,0) , (1,1) , (1,2) \\ (2,-2) , (2,-1) , (2,0) , (2,1) , (2,2) \end{bmatrix}(−2,−2),(−2,−1),(−2,0),(−2,1),(−2,2)(−1,−2),(−1,−1),(−1,0),(−1,1),(−1,2)(0,−2),(0,−1),(0,0),(0,1),(0,2)(1,−2),(1,−1),(1,0),(1,1),(1,2)(2,−2),(2,−1),(2,0),(2,1),(2,2)
flow vector会与offset map中的每个元素相加,得到2r+12r+12r+1个flow vector,使用这些flow vector在4D相似性金字塔上提取相应的相似性信息,然后送入运动编码器计算提取运动特征。
这一步骤公式简化为:
M=MotionEncoder(LookUp(Vk,μ,r))M=MotionEncoder(LookUp({V_k},\mu,r))M=MotionEncoder(LookUp(Vk,μ,r))
然后M送入RNN模块中进行下一次的预测:
hˊ=RNN(h,M,C(I1))\acute{h}=RNN(h,M,C(I_1))hˊ=RNN(h,M,C(I1))
Δμ=FLowHead(hˊ)\Delta \mu=FLowHead(\acute{h})Δμ=FLowHead(hˊ)
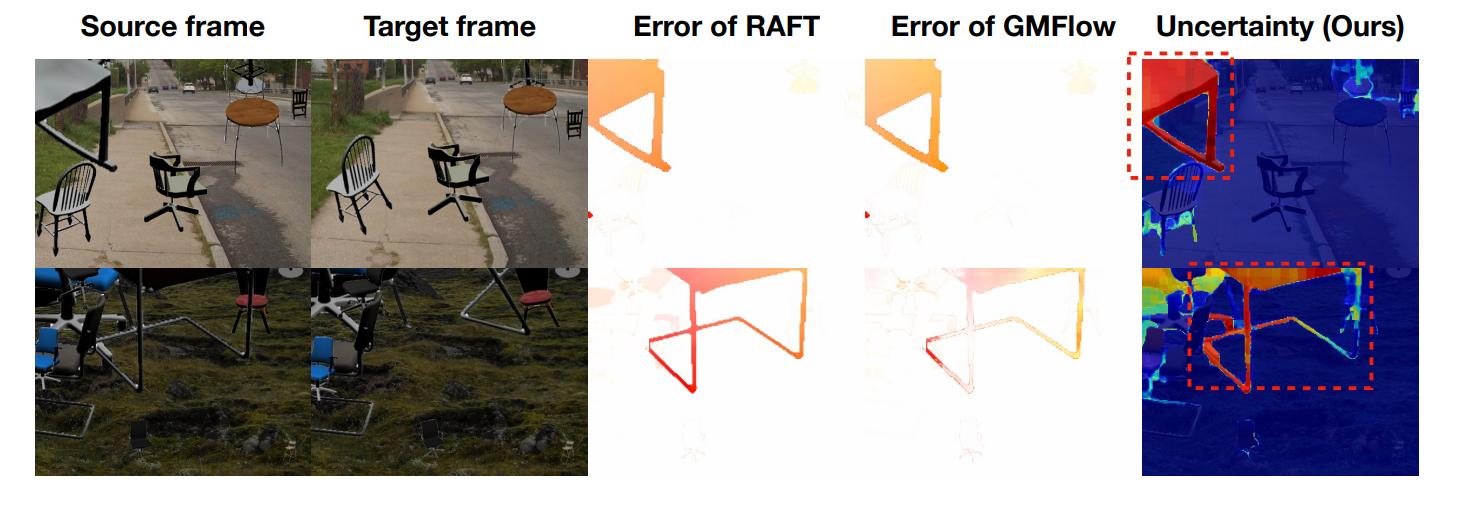
Mixture-of-Laplace Loss
部分光流训练数据中存在歧义,比如遮挡等,使得估计的光流与GT偏差较大,导致计算的loss(End-Point-Error)很大,这会在一定程度上误导模型优化方向。
不再简单的计算End-Point-Error这种类L1的loss,而是计算模型预测光流的分布与实际光流分布的差异。
通常地,模型估计数据分布,一般选择常见的Gauss和Laplace分布,通过最大似然函数估计分布参数。

概率密度函数pθp_\thetapθ由模型及其参数来表示。
SEA-RAFT选择使用Laplace分布作为模型要学习的分布函数pθp_\thetapθ。所以loss可表示为:
然而最大似然函数包含log项,loss中包含log项不利于训练收敛,所以模型直接预测log
设计了包含两项的loss:MoL
第一项:接近End-Point-Error这种类L1 loss,第二种则是Laplace分布
有一个参数α控制loss前后两项的权重,α由网络预测
Laplace分布的scale factor b也由网络预测,只不过是log b


这样,既能在碰到正常样本时着重关注End-Point-Error,也能在歧义样本时关注不确定性的估计。
Direct Regression of Initial Flow
RAFT-style方法的iterative refinement通常会将初始光流初始化0,然而零初始化得到的光流与GT相差甚远,因此需要更多iteration去迭代优化。SEA-RAFT从Flow-Net的方法中借鉴了idea:给定前后两帧,直接利用context encoder估计一个初始光流。
这种方法显著提升了模型的收敛速度,在推理时可以降低iteration次数,从而降低计算量。
Large-Scale Rigid-Flow Pre-Training
先前大多数方法都是在一个小数据集上训练,数据样本少、场景多样性不够、不够真实。为了提升模型的泛化能力,SEA-RAFT在TartanAir数据集上进行了pre-train。TartanAir数据集提供了全景相机图像对的光流标签。TartanAir数据集里的这种运动形式可以看作是光流的一种特殊形式,静止场景,是改变了拍摄视角引起的运动。尽管缺乏运动的多样性,但是增加了运动的真实性和场景多样性,是模型具备了更好的泛化性。