图论-最短路 Bellman-Ford算法
文章目录
- Bellman-Ford算法
- SPFA优化
- 路径记录与传输
Bellman-Ford算法
此算法是基于松弛操作的单源最短路算法。
e[u]存u点的出边的邻边和边权,d[u]存u点到源点的距离。
- 1.初始化,d[s]=0,d[其他点]=INT_MAX。
- 2.执行多轮循环,对所有边都尝试进行一次松弛操作。
- 3.当一轮中没有成功的松弛操作时,算法停止。
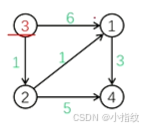
如图,3为源点
代码展示
struct edug{int v,w;
};
vector<edge>e[N];
int d[N];
bool Bellman-Ford(int s)
{//把所有点到源点的距离初始为无穷大memset(d,0x3f3f3f,sizeof d);d[s]=0;//源点到自身的距离为0bool f;//标记是否有松弛操作for(int i=1;i<=n;i++)//n轮操作 {f=false;for(int u=1;u<=n;u++)//n个点 {if(d[u]==0x3f3f3f)continue;for(auto x:ed[u])//遍历u的出边 {int v=x.v,w=x.w;if(d[u]+w<d[v]){d[v]=d[u]+w;f=true;}}}if(!f)break;//没有得到更新就退出 } return f;//第n轮=true则有环
}int main()
{cin>>n>>m>>s;for(int i=0;i<m;i++){cin>>a>>b>>c;e[a].push_back({b,c});}return 0;}
优点:
可以正确处理负边权。
可以判负环,如果n轮循环后仍存在能松弛的边,则说明存在负环。
时间复杂度:O(nm)
SPFA优化
我们可以想到只有本轮被更新的点,其出边才有可能引起下一轮的松弛操作,因此用队列来维护被更新的点的集合。
vis[u]标记u点是否在队内,cnt[v]记录边数,判负环。
- 1.初始化,s入队,并标记s在队内,d[s]=0,d[其他点]=INT_MAX
- 2.从队头弹出u点,标记u不在队内
- 3.枚举u的所有出边,执行松弛操作,记录s到v的边数,并判负环。如果v不在队内则把v 压入队尾,并标记
- 重复2,3操作,直到队列为空。
代码展示
struct edug{int v,w;
};
vector<edge>e[N];
int d[N];
queue<int>q;
bool spfa(int s)
{memset(d,0x3f3f3f,sizeof d);d[s]=0,vis[s]=1;q.push(s);while(q.size()){int u=q.front();q.pop();vis[u]=0;for(auto x:e[u]){int v=x.v,w=x.w;if(d[u]+w<d[v]){d[v]=d[u]+w;cnt[v]=cnt[u]+1;if(cnt[v]>=n)return true;if(!vis[v])q.push(v),vis[v]=1;}}}return false;
}
路径记录与传输
void dfs_path(int u)
{if(u==1){cout<<u<<" ";return ;}dfs_path(pre[u]);cout<<u<<" ";
}