更新雅可比矩阵的非线性部分笔记
// 更新雅可比矩阵的非线性部分
df(1,6) = -vel_trans * sin(yaw);
df(2,6) = vel_trans * cos(yaw);
// ∂x/∂θ = -v*sin(θ) df(2,6) = vel_trans * cos(yaw);
// ∂y/∂θ = v*cos(θ) 为什么是这两行 而不是别的行呢
我们重点分析为什么在雅可比矩阵中只更新了(1,6)和(2,6)这两个位置。这需要从机器人的运动模型和状态向量的定义入手。
状态向量(state)的定义:
1: x(机器人在世界坐标系中的x坐标)
2: y(机器人在世界坐标系中的y坐标)
3: z
4: roll
5: pitch
6: yaw(机器人在世界坐标系中的偏航角)
控制输入(vel)的定义:
1: 线速度v(沿机器人前进方向,即x方向)
2: 角速度ω
运动模型(状态转移函数):
x_{k+1} = x_k + v * cos(yaw_k) * Δt
y_{k+1} = y_k + v * sin(yaw_k) * Δt
yaw_{k+1} = yaw_k + ω * Δt
注意:在代码中,传递给运动模型的控制输入(vel)已经包含了时间间隔?实际上,在代码中,我们注意到vel_trans是直接用的vel(1),而并没有另外乘以Δt。这意味着在调用此运动模型之前,速度应该已经乘以了时间(即实际上传递的是位移和角度变化量)。因此,我们在代码中看到:
state(1) += cos(state(6)) * vel(1); // 相当于Δx = v * cos(θ) * Δt
state(2) += sin(state(6)) * vel(1); // 相当于Δy = v * sin(θ) * Δt
state(6) += vel(2); // 相当于Δθ = ω * Δt
现在,我们需要计算状态转移函数关于状态向量的雅可比矩阵(即偏导数矩阵)F,用于扩展卡尔曼滤波的协方差传播。
雅可比矩阵F的元素定义为:
F(i,j) = ∂f_i / ∂x_j (f_i是状态转移函数第i个分量,x_j是状态向量的第j个分量)
由于运动模型只改变了x, y和yaw(状态向量的第1、2、6个分量),其他分量保持不变(即f_i = x_i,当i=3,4,5时),所以雅可比矩阵中对应于z,roll,pitch的行应该是单位矩阵(对角线上为1,其余为0)。
而我们需要计算的是状态转移函数相对于当前状态(k时刻)的偏导数。具体来看:
-
对于x_{k+1} = x_k + v * cos(yaw_k) * Δt
对x_k的偏导:∂(x_{k+1})/∂x_k = 1
对y_k的偏导:0
对yaw_k的偏导:∂(x_{k+1})/∂yaw_k = -v * sin(yaw_k) * Δt (注意:这里v*Δt就是vel(1)) -
对于y_{k+1} = y_k + v * sin(yaw_k) * Δt
对y_k的偏导:1
对yaw_k的偏导:∂(y_{k+1})/∂yaw_k = v * cos(yaw_k) * Δt -
对于yaw_{k+1} = yaw_k + ω * Δt
对yaw_k的偏导:1 -
其他状态分量的偏导:保持不变,所以对角线上为1,其他为0。
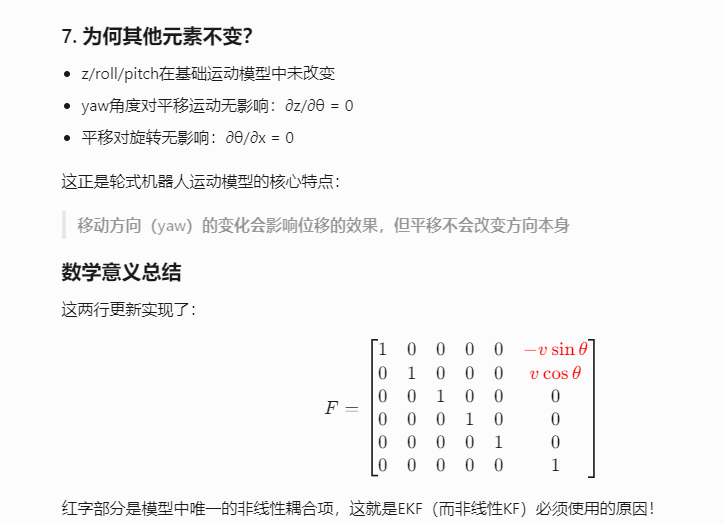
因此,雅可比矩阵F(6x6)为:
x y z r p yaw x [ 1 0 0 0 0 -v*sin(yaw)*Δt ] y [ 0 1 0 0 0 v*cos(yaw)*Δt ] z [ 0 0 1 0 0 0 ] r [ 0 0 0 1 0 0 ] p [ 0 0 0 0 1 0 ]
yaw [ 0 0 0 0 0 1 ]
在代码中,df初始化为单位矩阵(对角线上为1,其他为0)。因此,我们只需要修改第1行第6列(即df(1,6))和第2行第6列(即df(2,6))这两个元素,将初始的0改为计算得到的值。
所以代码中:
df(1,6) = -vel_trans * sin(yaw); // 对应∂(x_{k+1})/∂yaw_k = -vΔtsin(yaw)
df(2,6) = vel_trans * cos(yaw); // 对应∂(y_{k+1})/∂yaw_k = vΔtcos(yaw)
而其他位置的偏导数已经是0(非对角线)或者1(对角线),无需改变。
结论:我们只更新了这两个位置,因为运动模型中只有x和y的更新方程含有yaw角(状态向量的第6个分量),其他状态变量没有交叉耦合。
注意:在控制理论中,我们通常将状态转移函数关于状态向量求偏导。这里我们只对状态向量(k时刻)求导,控制输入(vel)在这里视为已知量,不需要求导(因为控制输入是独立的输入,不是状态向量的一部分)。