复旦微FMQL调试笔记:PS网口
引言
FPGA,全程现场可编程门阵列,是指一切通过软件手段更改、配置器件内部连接结构和逻辑单元,完成既定设计功能的数字集成电路。换个简单通俗的介绍方式,就好比一个全能的运动员,FPGA就是这么神奇的可以通过设定而实现各种复杂的功能电路。
FPGA的核心优点:
可编程灵活性高、开发周期短、并行计算可编程灵活性高。同时FPGA也有自身的很多需要解决的问题,FPGA限制因素:成本、功耗和编程设计。
现在已经在三个重要领域发挥着重量级作用:
- (1)通信设备的高速接口电路设计一般如果AD采样率高,数据速率高,这时就需要FPGA对数据进行处理,比如对数据进行抽取滤波,降低数据速率,使信号容易处理,传输,存储;
- (2)数字信号处理方向/数学计算方向,包括图像处理,雷达信号处理,医学信号处理等,优势是实时性好,用面积换速度,比CPU快的多;
- (3)SOPC,即利用FPGA这个平台搭建的一个嵌入式系统的底层硬件环境,然后设计者在上面进行嵌入式软件开发。
自1984年Xilinx刚刚创造出FPGA时,它还是简单的胶合逻辑芯片,而如今在信号处理和控制应用中,它已经取代了自定制专用集成电路(ASIC)和处理器。短短不到40年的历史长河中,超过上百家行业巨头杀入这个市场,不过最后大部分都铩羽而归。
这些公司包括了Intel、Philips、Agere Systems、AMD以及摩托罗拉等国际知名的芯片设计厂商。这是因为,Xilinx和Altera在这个领域深耕几十年,两家持续不断地军备竞赛,占据了90%市场
已经更新了很久的zynq系列就是xilinx的产品,但是对于时代和特殊应用场景的选择下,我们需要介绍仍在进步中的国产芯片:如对标zynq,复旦微电子的FMQL可编程融合芯片(全可编程PSOC芯片)系列。
在实际的调试中,不难发现,除去明面上容易查到的比如PS端双核的A9替换为了四核A7等硬件参数,一些不容易查到的比如xilinx成熟的底层硬件加速等,还是有不少差异的。
gmac调试
调试了有段时间,这里记录一些FMQL的调试笔记,可以与zynq相互对比,本篇首先更新 Ps 的千兆网口gmac 有哪些需要注意的地方
单phy 节点明确指定phy 地址的 设备树写法:
&gmac0 { status = "okay"; snps,reset-gpio = <&portb 17 GPIO_ACTIVE_LOW>; snps,reset-active-low; snps,reset-delays-us = <0 10000 100000>; phy-handle = <&phy0>; mdio@0 { compatible= "snps,dwmac-mdio"; #address-cells = <1>; #size-cells = <0>; phy0: eth-phy@7 { reg = <7>; }; }; };
单phy 节点不明确指定 phy 地址写法
&gmac0 { status = "okay"; snps,reset-gpio = <&portb 17 GPIO_ACTIVE_LOW>; snps,reset-active-low; snps,reset-delays-us = <0 10000 100000>; };
phy 核心层代码会扫描所有的 phy 地址(0-31),特别要注意的是 20210816bsp 里 uboot 需要则一定需要加上 mdio 节点了,主要是修改了共享 mdio 的支持(进口没有做相应的支持)。
一路mdio 控制两个phy,设备树写法
&gmac0 { status = "okay"; snps,reset-gpio = <&portb 17 0>; snps,reset-active-low; snps,reset-delays-us =<0 10000 100000>; phy-handle = <&phy0>; mdio@0 { compatible= "snps,dwmac-mdio"; #address-cells = <1>; #size-cells = <0>; phy0: eth-phy@7 { reg = <7>;//按实际修改 }; phy1: eth-phy@4 { reg = <4>; //按实际修改 }; }; }; &gmac1 { phy-mode="rgmii-id"; //gmac1 默认的 phy-mode 是 rgmii,和 gmac0 不一样status="okay"; phy-handle=<&phy1>; };
gmac1 的默认 phy-mode 和 gmac0 不一样, 不管怎么样,能 link 不能通信时,每个gmac 都是要调整一下 tx 和 rx delay 的。
PS:一路mdio 控制两个phy,phy 地址不能有0,因为0 地址是广播地址,对 0 地址处理不同 phy 表现不一样,,这样会引起混乱。
下面是简单讨论一下:
https://www.xilinx.com/support/answers/59554.html
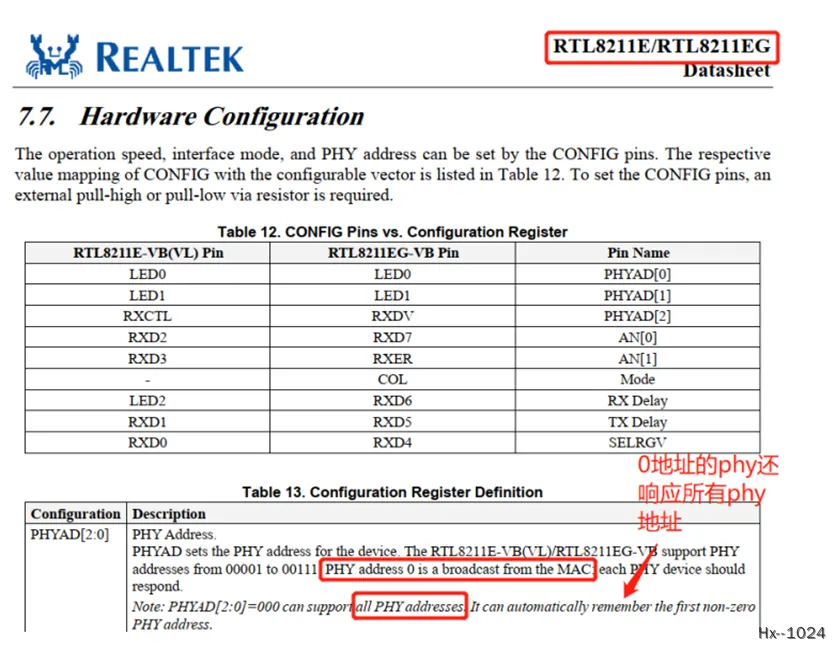
有的 phy 厂家可以关掉 phy 对0地址的响应,另外 demo 的 88E1116R 应该就不响应0地址,这个还要看 phy 厂家的,不管怎么样,对于共享 mdio 总线的两个 phy,不要用0地址了,否则大概率会碰到问题,单 phy 则没有这个限制,因为没有潜在的冲突。特备要注意的是, mdio 勾在哪个 mac 下面,则要写到对应的 gmac 设备节点下面。
phy-mode 属性说明
rgmii-txid rgmii -rxid rgmii-id rgmii 可 以 参 考 内 核 文 档
Documentations/devicetree/bindings/net/ethernet.txt。“rgmii” (RX and TX delays are added by the MAC when required) 。“rgmii-id” (RGMII with internal RX and TX delays provided by the PHY, the MAC should not add the RX or TX delays in this case)。
指PHY 的内部有延时寄存器设置,mac 就不用设置了。
两个变体:
“rgmii-rxid” (RGMII with internal RX delay provided by the PHY, the MAC should not add an RX delay in this case)。“rgmii-txid” (RGMII with internal TX delay provided by the PHY, the MAC should not add an TX delay in this case) 。
千兆有问题的时候,特别是怀疑 tx 和 rx delay 有问题时,可以尝试用百兆或十兆模式尝试一下。
另外和 u-boot 一样,可以在设备树 gmac 里限定 max-speed 为 100M:
max-speed=<100>;
方便某些调试场合可能会用到。
Linux 和 uboot 测试设备树相同,如下图
&gmac0{
status = "okay";
snps,reset-gpio = <&portb 17 GPIO ACTIVE LOW>; snps,reset-active-low;
snps,reset-delays-us =<0 10000 100000>;
max-speed=<100>;; /*强制100M */};
Hx--1024
ethtool eth0
Settings for eth0:
Supported ports: [ TP MII ]
Supported link modes: 10baseT/Half 10baseT/Full
100baseT/Half 100baseT/Full1000baseT/Half 1000baseT/Full
Supported pause frame use: Symmetric Receive-only Supports auto-negotiation: Yes
Advertised link modes: 10baseT/Half 10baseT/Full
100baseT/Half 100baseT/Full
Advertised pause frame use: No Advertised auto-neqotiation: Yes
Link partner advertised link modes: 10baseT/Half 10baseT/Full
100baseT/Half 100baseT/Full
Link partner advertised pause frame use: Svmmetric Receive-onlv
ertised auto-negotiation: Yes
Speed:100Mb/s Duplex:Full Port:MII PHYAD:7
Transceiver: internal Auto-negotiation: on Supports Wake-on: d Wake-on:d
Current message level: 0x0000003f (63)
drv probe link timer ifdown ifup
Link detected: yes Hx--1024
可以用 ethtool eth0 查看网口速度,另外插拔网线或者 down 和 up 一下 eth0。