Meshroom 2025.1.0安装及使用参数模板介绍:二维图片转三维重建

一、软件概述与技术背景
Meshroom是一款基于AliceVision框架的免费开源三维重建软件,采用摄影测量技术将普通二维照片转换为精确的三维模型。Meshroom 2025.1.0版本引入了节点式视觉编程架构,集成了人工智能驱动的语义分割功能,支持自然语言提示识别和分离图像对象。
软件采用CUDA-12构建,推荐配置包括配备NVIDIA CUDA支持的独立显卡和32GB系统内存。对于不具备专用GPU的系统,软件提供草图网格化模式,虽然功能受限但仍可完成基础重建任务。
地址:Meshroom
下载后解压:
二、数据获取方式比较分析
2.1 视频转图像序列的技术限制(不建议)
使用FFmpeg工具从视频文件提取图像帧存在显著技术限制。视频文件无法保留完整的EXIF相机参数信息,导致Meshroom无法正确识别相机内参数据。
FFmpeg基础命令操作:
ffmpeg -i test.mp4 -vf fps=1 -q:v 2 frame_%04d.jpg
该命令每秒提取一帧图像,质量参数设置为2(高质量)。不同需求可调整提取频率:fps=0.5适用于长视频,fps=2适合密集角度覆盖场景。
2.2 手机连拍的推荐方案(建议)
直接使用智能手机进行连续拍摄是获取高质量输入数据的最佳方式。现代智能手机具备完整的EXIF元数据记录功能,确保Meshroom正确识别图像拍摄参数。有效拍摄需确保相邻图像间60-80%的重叠度,保持一致光照条件,围绕目标对象进行360度覆盖拍摄。
三、软件界面与基础操作
Meshroom采用分区式界面设计,包含图像库区域、节点编辑器、三维查看器、属性面板和任务管理器。软件使用颜色编码系统标识处理状态:绿色表示完成,黄色表示处理中,灰色表示等待,红色表示失败。
标准操作流程包括选择合适的管道模板,导入输入图像,验证相机参数识别状态,检查节点连接完整性,最后启动完整处理流程。

四、官方模板完整功能指南
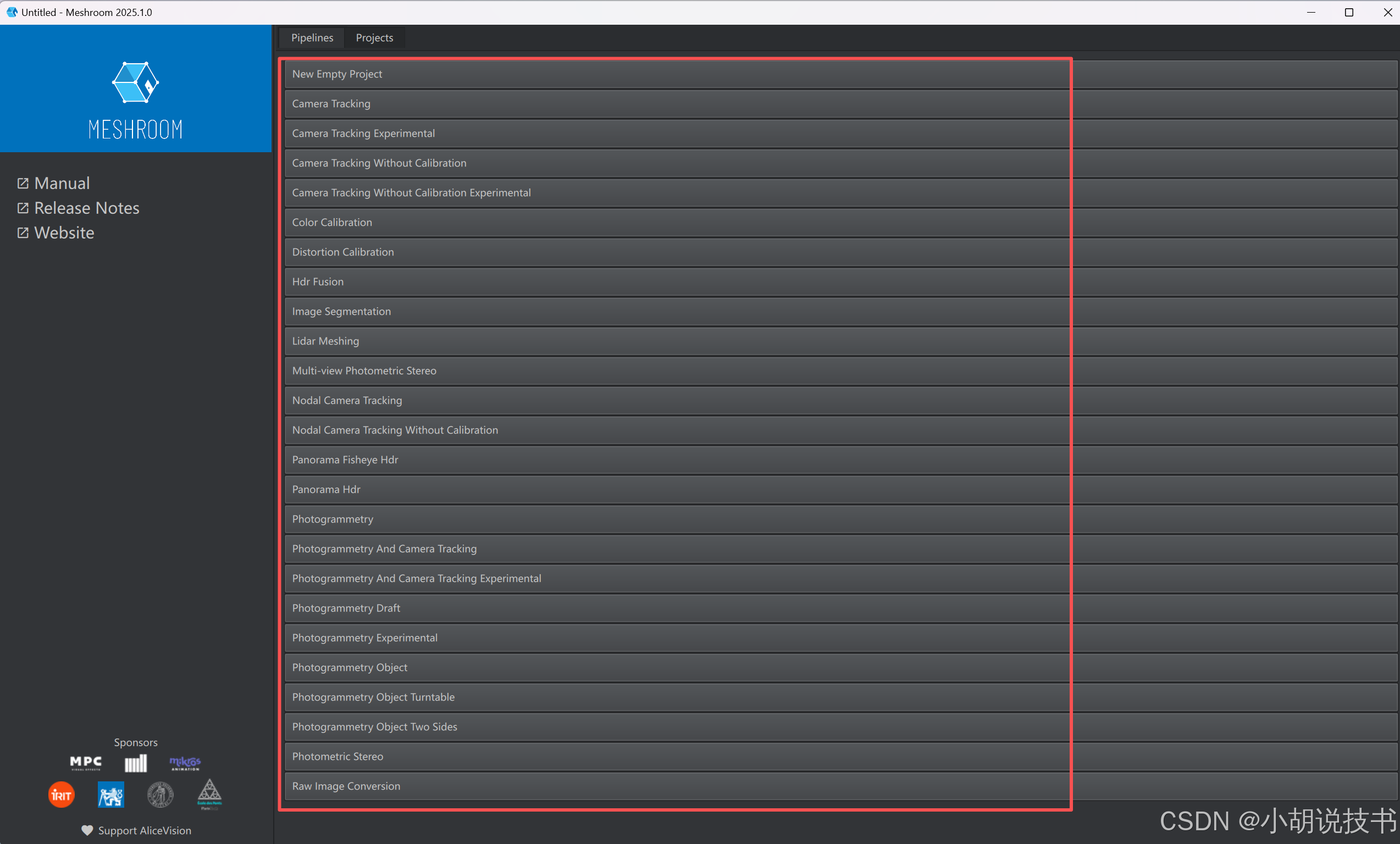
4.1 标准摄影测量模板系列
| 模板名称 | 适用场景 | 核心特性 | 关键参数配置 |
|---|---|---|---|
| Photogrammetry | 通用场景重建 | 标准算法流程,适应性强 | 默认参数,适合房间、建筑、大型物体 |
| Photogrammetry Draft | 快速预览重建 | 降采样处理,速度优先 | Downscale=2-4,快速测试效果 |
| Photogrammetry Experimental | 高精度重建 | 最新算法集成,实验性功能 | Describer Preset=Ultra,计算资源消耗高 |
4.2 对象专用重建模板
| 模板名称 | 适用对象类型 | 技术特点 | 参数优化要点 |
|---|---|---|---|
| Photogrammetry Object | 单体小物体 | AI背景分离,语义分割 | 桃子、玩具、首饰等小物体重建 |
| Photogrammetry Object Turntable | 转盘拍摄物体 | 旋转对称优化处理 | 产品展示,工艺品,收藏品 |
| Photogrammetry Object Two Sides | 双面扁平对象 | 分离式重建后合并 | 硬币、奖牌、浮雕,需正反面拍摄 |
4.3 相机跟踪专业模板
| 模板名称 | 应用领域 | 核心功能 | 技术规格 |
|---|---|---|---|
| Camera Tracking | 影视后期制作 | 精确相机轨迹分析 | 虚拟对象合成,运动匹配 |
| Camera Tracking Experimental | 复杂运动场景 | 实验性跟踪算法 | 快速运动,复杂路径处理 |
| Camera Tracking Without Calibration | 未知参数视频 | 自标定算法 | 现有素材分析,旧设备内容 |
| Nodal Camera Tracking | 专业设备 | 节点式拍摄优化 | 摄影棚设备,机械臂拍摄 |
| Photogrammetry And Camera Tracking | 综合应用 | 场景重建+相机跟踪 | 虚拟制片,AR应用开发 |
| Photogrammetry And Camera Tracking Experimental | 高级综合处理 | 实验性综合算法 | 研究级应用,高精度需求 |
4.4 高动态范围图像处理模板
| 模板名称 | 处理对象 | 技术原理 | 应用场景 |
|---|---|---|---|
| Hdr Fusion | 多曝光同一场景 | 高动态范围合成 | 室内外光差大场景,逆光拍摄 |
| Panorama Hdr | 全景HDR图像 | 全景拼接+HDR | VR内容制作,环境贴图 |
| Panorama Fisheye Hdr | 鱼眼全景图像 | 畸变校正+HDR | 360度全景相机内容 |
4.5 光度立体与表面分析模板
| 模板名称 | 技术特点 | 数据要求 | 精度优势 |
|---|---|---|---|
| Photometric Stereo | 单视角多光源 | 固定相机,变化光照 | 硬币纹理,石刻文字,浮雕细节 |
| Multi-view Photometric Stereo | 多视角多光源 | 复合拍摄设置 | 文物修复,皮肤纹理,织物材质 |
4.6 专业数据处理模板
| 模板名称 | 数据类型 | 处理能力 | 行业应用 |
|---|---|---|---|
| Lidar Meshing | 激光雷达点云 | E57、PLY格式支持 | 建筑测量,地形建模,考古发掘 |
| Image Segmentation | 需要背景分离的图像 | AI智能分割 | 产品抠图,对象识别预处理 |
4.7 图像校正与转换模板
| 模板名称 | 校正类型 | 技术方法 | 解决问题 |
|---|---|---|---|
| Color Calibration | 颜色标准化 | 色彩空间转换 | 不同光源拍摄,颜色一致性 |
| Distortion Calibration | 镜头畸变校正 | 几何变换算法 | 广角镜头,鱼眼镜头畸变 |
| Raw Image Conversion | RAW格式处理 | 原始数据转换 | 专业相机RAW文件,精确色彩 |
五、三维查看器优化与显示控制
5.1 点云显示参数调整
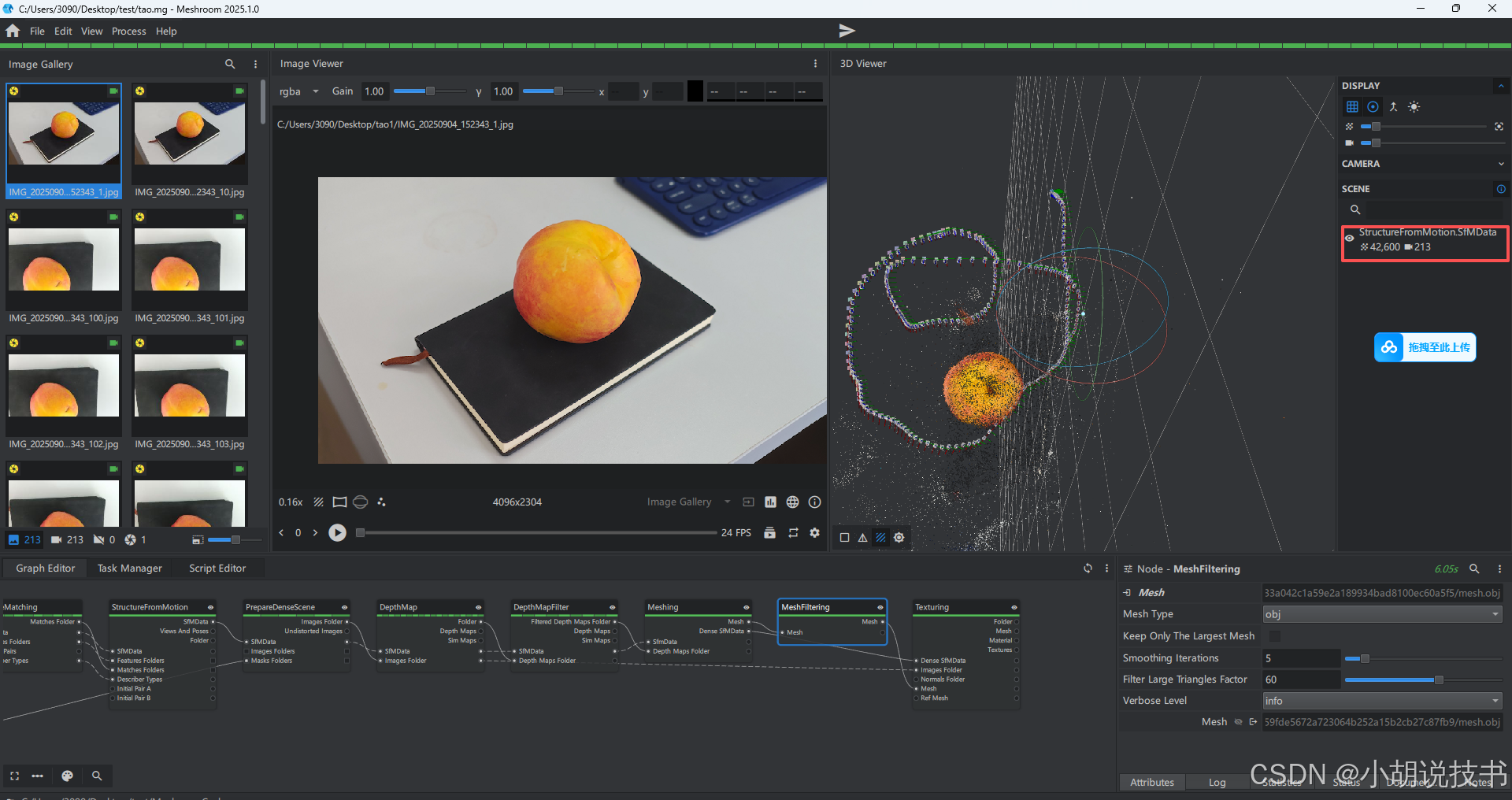
在三维查看器的右侧面板中,DISPLAY部分提供了多项显示控制选项。点大小调整通过Point Size滑块控制,适当增大数值可以使稀疏点云更加清晰可见。Vertex Color选项控制顶点颜色显示模式,Wireframe模式可以查看网格结构的线框表示。
Scene面板中的Statistics显示了重建结果的详细统计信息,包括顶点数量、三角面片数量等关键指标。这些数据有助于评估重建质量和模型复杂度。通过调整显示参数,用户可以获得最适合当前需求的可视化效果。
5.2 计算量优化策略
针对处理时间过长的问题,可以通过多种方式优化计算效率。在FeatureExtraction节点中,将Describer Preset从Ultra降级至High或Normal可以显著减少特征点数量,缩短后续处理时间。Max Threads参数应设置为CPU核心数的75%,避免系统资源过度占用。
DepthMap节点的Downscale参数是控制计算量的关键设置。将数值从1增加至2或3可以大幅降低处理时间,虽然会损失一定精度但对于预览和测试目的已经足够。Nb GPU used参数在多GPU系统中可以提升并行处理效率。
在Meshing节点中,Max Input Points参数直接影响网格生成的复杂度和处理时间。对于小物体重建,设置为500万至1000万点通常能够在质量和效率间取得良好平衡。
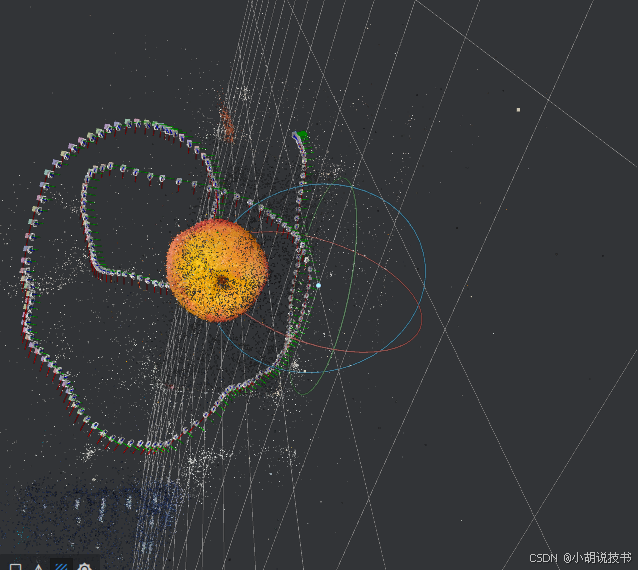
以下是简单的尝试(左侧黄色圈是能读取相机元数据,红色这不能,用视频提取图片是大概率红的,不能读取是有点影响,右边是能识别上):右边可以调一下点的大小(在红框的上面的滑条,点位少的,调调大小和角度效果还可以)。
解读参考博客:【三维重建】Meshroom的安装及使用方法(Windows)
Quentin_HIT(上述参考博客):确认拖入的图片左上角显示绿色或黄色图标,鼠标移上去可以显示相机型号和参数等信息。如果左上角显示红色图标,需要重新设置拍摄相机并重新拍摄照片。
六、关键参数配置详解
5.1 核心节点参数设置
CameraInit节点负责相机参数初始化,主要参数包括Sensor Database(传感器数据库路径)、Default Field of View(默认视场角45度)、Group Camera Fallback(相机分组策略)。
FeatureExtraction节点控制特征提取质量,Describer Types支持SIFT、AKAZE等算法,Describer Preset分为normal、high、ultra三个级别,Max Threads应设置为CPU核心数的75-100%。
StructureFromMotion节点执行核心重建算法,Initial Pair A/B参数允许指定初始图像对,Local Bundle Adjustment启用局部光束平差优化,Max Iterations控制迭代优化次数。
DepthMap节点生成密集深度信息,Downscale参数控制降采样比例(2-4),Min/Max Depth限制深度范围,Nb GPU used指定参与计算的GPU数量。
附录:专业术语表
AliceVision框架:开源计算机视觉框架,提供三维重建和相机跟踪算法的完整实现
CUDA:NVIDIA开发的并行计算平台,支持GPU加速的通用计算任务
EXIF元数据:嵌入在数字图像文件中的拍摄参数信息,包括相机型号、曝光设置等
FFmpeg:开源多媒体框架,支持音视频编码、解码、转换和流媒体处理
GPU并行计算:利用图形处理器的多核架构执行并行算法,显著提升计算密集型任务的处理速度
光束平差优化:通过最小化重投影误差同时优化相机参数和三维点坐标的非线性优化算法
激光雷达点云数据:激光扫描设备直接测量获得的三维坐标点集合,具有高精度和高密度特征
立体视觉原理:模拟双眼视觉机制,通过分析不同视角图像的视差信息重建三维深度信息
摄影测量技术:从摄影图像中提取几何和物理信息的测量科学,广泛应用于测绘、考古、工程等领域
特征跟踪算法:在图像序列中检测、描述和匹配显著特征点的计算机视觉算法
位姿估计:确定相机在三维空间中位置和姿态的计算过程,包括平移和旋转参数
语义分割功能:基于深度学习的图像分析技术,能够识别和分离图像中的不同对象类别
节点式视觉编程:采用图形化节点和连接线表示数据处理流程的编程范式,便于可视化管理复杂算法流程