模拟IC设计基础系列6-差动放大器 Differential AMP
1. 模拟电路设计绪论
2. MOS器件物理基础
3. 单级放大器
4. Cascode stage 共源共栅结构分析与计算
5. MOS电路中的电流镜设计
6. 差动放大器 Differential AMP
6.1 差分输入
在电路的实际工作中,往往存在各种干扰(例如VDD和GND的波动、金属线的电容耦合等),而模拟电路对干扰非常敏感,所以我们需要一种电路结构来抑制这种影响。
6.1.1 差分信号

图1.一个信号可以被拆解成差分信号表示
定义共模电平(Common mode Level)
V C M : V C M = V i n 1 + V i n 2 2 = V B V_{CM} : {V_{CM}} = \frac{{{V_{in1}} + {V_{in2}}}}{2} = {V_B} VCM:VCM=2Vin1+Vin2=VB
共模电平确定了电路的工作点电压,我们希望它没有扰动,是个固定值
定义差模电平(Differential mode Level)
V d i f f : V d i f f = V i n 1 − V i n 2 = v i n V_{diff} : {V_{diff}} = {V_{in1}} - {V_{in2}} = {v_{in}} Vdiff:Vdiff=Vin1−Vin2=vin
而对于任意的两个输入vin1,vin2,可以将它们拆解为两部分:
{ v C M = v i n 1 + v i n 2 2 ( 共模部分 ) v d i f f 1 = v i n 1 − v i n 2 2 ( 差模部分 ) v d i f f 2 = v i n 2 − v i n 1 2 ( 差模部分 ) \left\{ \begin{array}{l} {v_{CM}} = \frac{{{v_{in1}} + {v_{in2}}}}{2} (共模部分) \\ {v_{diff1}} = \frac{{{v_{in1}} - {v_{in2}}}}{2}(差模部分)\\ {v_{diff2}} = \frac{{{v_{in2}} - {v_{in1}}}}{2}(差模部分) \\ \end{array} \right. ⎩ ⎨ ⎧vCM=2vin1+vin2(共模部分)vdiff1=2vin1−vin2(差模部分)vdiff2=2vin2−vin1(差模部分)
6.1.2 差分放大的优点
6.1.2.1 消除电压波动带来的影响

当电源VDD上有一个电压噪声vn,使用差分结构可以消除噪声干扰
在小信号模型中,若电源VDD上有一个电压噪声vn,那么我们可以从分压的角度来观察vn对vout的影响:从MOS的漏极看下去,得到的是一个很大的小信号电阻ro,通常远大于RD,于是从分压的角度来看,电压噪声几乎全部全部降落在ro1上,即vn的波动几乎完全加在vout上。
我们令两边输入大小相同,相位相反;且左右两边完全对称:
{ v i n 1 = v i n v i n 2 = − v i n g m 1 = g m 2 = g m v o u t 1 = − g m 1 R D v i n 1 + v n v o u t 2 = − g m 2 R D v i n 2 + v n \left\{ \begin{array}{l} {v_{in1}} = {v_{in}}\\ {v_{in2}} = - {v_{in}}\\ {g_{m1}} = {g_{m2}} = {g_m}\\ {v_{out1}} = - {g_{m1}}{R_D}{v_{in1}} + {v_n}\\ {v_{out2}} = - {g_{m2}}{R_D}{v_{in2}} + {v_n} \end{array} \right. ⎩ ⎨ ⎧vin1=vinvin2=−vingm1=gm2=gmvout1=−gm1RDvin1+vnvout2=−gm2RDvin2+vn
解得: v o u t 1 − v o u t 2 = − 2 g m R D v i n {v_{out1}} - {v_{out2}} = - 2{g_m}{R_D}{v_{in}} vout1−vout2=−2gmRDvin
从结果看出,使用差分结构可以有效地消除一些电路中的噪声
6.1.2.2 大输出摆幅
单端的共源放大器的输出范围以及输出摆幅为:
{ V o u t p u t ≥ V G S − V T H = V o d ( 保证共源管饱和 ) V o u t p u t ≤ V D D ( 共源管截止,无电流 ) V S w i n g = V D D − V o d \left\{ \begin{array}{l} {V_{output}} \ge {V_{GS}} - {V_{TH}} = {V_{od}}(保证共源管饱和)\\ {V_{output}} \le {V_{DD}}(共源管截止,无电流)\\ {V_{Swing}} = {V_{DD}} - {V_{od}} \end{array} \right. ⎩ ⎨ ⎧Voutput≥VGS−VTH=Vod(保证共源管饱和)Voutput≤VDD(共源管截止,无电流)VSwing=VDD−Vod
而对于差分结构,当左边vin1增大时,vout1降低;同时右边vin2减小,vout2增大。
两边反相变化,若vout1达到最小时,vout2达到最大,vout1-vout2有最小值,反之亦然,那么有: { V o u t p u t ≥ V o d − V D D V o u t p u t ≤ V D D − V o d V S w i n g = 2 ( V D D − V o d ) \left\{ \begin{array}{l} {V_{output}} \ge {V_{od}} - {V_{DD}}\\ {V_{output}} \le {V_{DD}} - {V_{od}}\\ {V_{Swing}} = 2({V_{DD}} - {V_{od}}) \end{array} \right. ⎩ ⎨ ⎧Voutput≥Vod−VDDVoutput≤VDD−VodVSwing=2(VDD−Vod)
由上式可知,差分结构的输出电压摆幅为单端的两倍
6.1.3 差分放大的缺点
第一、对称的结构需要双倍的面积,双倍的直流功率。
第二、噪声电压同时加在两边的电路,使得噪声造成的功率消耗变为原来的两倍,而功率是无法用差分结构抵消的。
6.2 基本差动对
6.2.1 基本差动对的结构

左边的结构有一个问题,当共模电压VCM波动,M1、M2的直流工作点就会同时上下波动,跨导和电流有较大变化,使得差分工作不稳定,这种结构也被称为伪差分(pseudo differential)。
为了改进这一个问题,可以在差放的下面接一个尾电流源,当电路左右对称时,两边电流平均分配尾电流源的电流,有如下关系: I D 1 = I D 2 = I S S / 2 {I_{D1}} = {I_{D2}} = {I_{SS}}/2 ID1=ID2=ISS/2
而输出电压的共模电平为: V o u t , C M = V D D − R D I S S / 2 {V_{out,CM}} = {V_{DD}} - {R_D}{I_{SS}}/2 Vout,CM=VDD−RDISS/2
当M1、M2同时工作在饱和区时,即使输入vin的共模电压发生了变化,但电流源决定了电流大小,电流源为了保证电流不变,会将P点电压Vp提高,保证VGS1、VGS2不变,使得两边流过的电流仍然不变,输出电平也不变,以此消除共模电压波动对直流工作点的影响。
带尾电流源的差分放大结构的基本原理就是利用两边电路对Iss的分配。由于总的电流不变,若vin1提高,vin2降低,左边的电路会分配到更多的电流,而右边的电路只能分到更少的电流。

在实际电路中,我们往往会使用MOS电流源来作为尾电流源
6.2.2 工作状态的定性分析
以MOS电流源为尾电流源的差放结构为例进行分析
6.2.2.1 差模输入电压对差动对的影响


Vin摆幅过大,导致一边MOS管截止,一边导通,电流全部从一边流过
随着vin的变化,M1、M2的VGS不断变化,两个MOS管不停地“争抢”电流,而电流流过电阻,使得电流的变化最终引起输出电压的变化(Vout=Vdd-IR)
此时,输出电压和输入电压的关系为:


可以看到,在Vin1-Vin2=0时,Vout1-Vout2的曲线斜率有最大值,若定义差模增益为:
A D M = v o u t , d i f f v i n , d i f f = v o u t 1 − v o u t 2 v i n 1 − v i n 2 {A_{DM}} = \frac{{{v_{out,diff}}}}{{{v_{in,diff}}}} = \frac{{{v_{out1}} - {v_{out2}}}}{{{v_{in1}} - {v_{in2}}}} ADM=vin,diffvout,diff=vin1−vin2vout1−vout2
即当Vin1-Vin2=0时,差分放大的差模增益取最大值
同时,对某一边的电路来说,输出电压Vout的摆幅为:
{ V o u t , min = max ( V D D − R D I S S , V i n , C M − V T H ) V o u t , max = V D D \left\{ \begin{array}{l} {V_{out,\min }} = \max ({V_{DD}} - {R_D}{I_{SS}},{V_{in,CM}} - {V_{TH}})\\ {V_{out,\max }} = {V_{DD}} \end{array} \right. {Vout,min=max(VDD−RDISS,Vin,CM−VTH)Vout,max=VDD
(加上差分信号后)随着Vin的提高,电路分到的电流I提高,若R过大则可能导致Vout降低较多,这可能导致M1进入线性区,那么 V o u t , min = V i n , C M − V T H {V_{out,\min }} = {V_{in,CM}} - {V_{TH}} Vout,min=Vin,CM−VTH;若M1不进入线性区,当一边的电路流过所有的电流Iss时,Vout有最小值, V o u t min = V D D − R D I S S {V_{out\min }} = V_{DD}-R_{D}I_{SS} Voutmin=VDD−RDISS 。
而当Vin降低,直到管子截止,则该支路没有电流流过,R没有分压(被截止的MOS分走了),Vout有最大值 V o u t , max = V D D {V_{out,\max }} = {V_{DD}} Vout,max=VDD
6.2.2.2 共模输入电压对差动对的影响
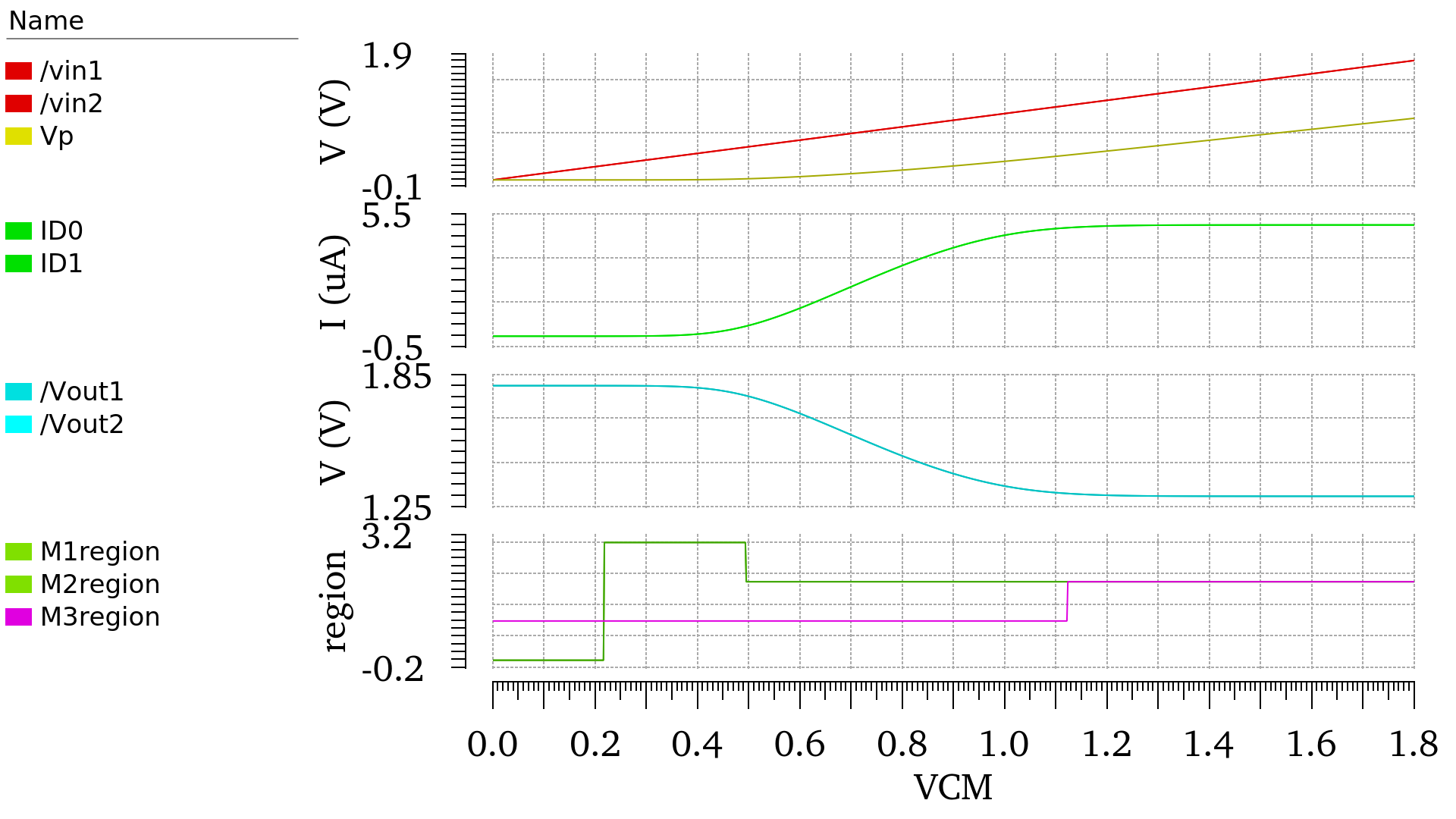
这里仿真用的电流源其实是Cascode电流镜,M3实际上是Cascode电流镜的共源管
1、一开始随着VCM的提高,M1、M2管从截止区进入亚阈值区,此时的电流依然很小,Vp稍微上升,电流镜M3维持在线性区即可提供很小的电流。
2、当VCM大于阈值电压Vth,M1、M2进入饱和区,但它俩产生的电流之和依旧较小,无法让电流镜管饱和。
3、随着VCM增加,电流增加,为了提高流过M3的电流,Vp自适应地提高。直到VCM足够大之后,两个管子产生的电流才足以让M3管饱和。
4、在M3管饱和以后,当VCM继续增大,电流却被尾电流源限制不能继续增大,因此Vp自适应地提高,让M1、M2的VGS减小(同时衬偏效应影响加重,M1、M2的VTH提高,这也抑制了电流的增大),抑制电流的增大。
根据上面的分析,共模输入电压的摆幅为:(左右两边电路对称,取一边分析)
{ V i n , C M min = V T H 1 + V o d 1 + V o d 3 V i n , C M max = min ( V D D , V D D − R D I S S / 2 + V T H 1 ) \left\{ \begin{array}{l} {V_{in,CM\min }} = {V_{TH1}} + {V_{od1}} + {V_{od3}}\\ {V_{in,CM\max }} = \min ({V_{DD}},{V_{DD}} - {R_D}{I_{SS}}/2 + {V_{TH1}}) \end{array} \right. {Vin,CMmin=VTH1+Vod1+Vod3Vin,CMmax=min(VDD,VDD−RDISS/2+VTH1)
共模输入电压的最小值是为了保证M1、M3管工作在设计好的饱和区中
共模输入电压的最大值分两种情况,一种是随着VCM的增大,由于尾电流源的沟道长度调制效应,Iss增大,若尾电流源的输出阻抗过小或电阻RD过大,Vout会下降较大,可能会使得M1管进入线性区,此时的 V i n , C M max = V D D − R D I S S / 2 + V T H 1 {V_{in,CM\max }} = {V_{DD}} - {R_D}{I_{SS}}/2 + {V_{TH1}} Vin,CMmax=VDD−RDISS/2+VTH1 ;反之,若直到VCM=VDD之后M1也没有进入非线性区,那么 V i n , C M max = V D D {V_{in,CM\max }} = {V_{DD}} Vin,CMmax=VDD 。
6.2.3 差模增益 A_{DM}
在定性了解差分放大器的工作状态后,我们对差放的差模增益进行定性分析
A D M = v o u t , d i f f v i n , d i f f = v o u t 1 − v o u t 2 v i n 1 − v i n 2 {A_{DM}} = \frac{{{v_{out,diff}}}}{{{v_{in,diff}}}} = \frac{{{v_{out1}} - {v_{out2}}}}{{{v_{in1}} - {v_{in2}}}} ADM=vin,diffvout,diff=vin1−vin2vout1−vout2
6.2.3.1 大信号分析
首先,差分输出电压可以表示为:
V o u t 1 − V o u t 2 = ( V D D − I d 1 R D 1 ) − ( V D D − I d 2 R D 2 ) = − ( I D 1 − I D 2 ) R D {V_{out1}} - {V_{out2}} = ({V_{DD}} - {I_{d1}}{R_{D1}}) - ({V_{DD}} - {I_{d2}}{R_{D2}}) = - ({I_{D1}} - {I_{D2}}){R_D} Vout1−Vout2=(VDD−Id1RD1)−(VDD−Id2RD2)=−(ID1−ID2)RD
下面我们求电流和输入电压的关系:
V i n 1 − V G S 1 = V i n 2 − V G S 2 {V_{in1}} - {V_{GS1}} = {V_{in2}} - {V_{GS2}} Vin1−VGS1=Vin2−VGS2
即 V i n 1 − V i n 2 = V G S 1 − V G S 2 {V_{in1}} - {V_{in2}} = {V_{GS1}} - {V_{GS2}} Vin1−Vin2=VGS1−VGS2
而VGS可以表示为: V G S = V o d + V T H = 2 I D μ n C o x W / L + V T H {V_{GS}} = {V_{od}} + {V_{TH}} = \sqrt {\frac{{2{I_D}}}{{{\mu _n}{C_{ox}}W/L}}} + {V_{TH}} VGS=Vod+VTH=μnCoxW/L2ID+VTH
那么有 V i n 1 − V i n 2 = V G S 1 − V G S 2 = 2 I D 1 μ n C o x W / L − 2 I D 2 μ n C o x W / L {V_{in1}} - {V_{in2}} = {V_{GS1}} - {V_{GS2}} = \sqrt {\frac{{2{I_{D1}}}}{{{\mu _n}{C_{ox}}W/L}}} - \sqrt {\frac{{2{I_{D2}}}}{{{\mu _n}{C_{ox}}W/L}}} Vin1−Vin2=VGS1−VGS2=μnCoxW/L2ID1−μnCoxW/L2ID2
将上式平方处理得: ( V i n 1 − V i n 2 ) 2 = 2 μ n C o x W / L ( I S S − 2 I D 1 I D 2 ) {\left( {{V_{in1}} - {V_{in2}}} \right)^2} = \frac{2}{{{\mu _n}{C_{ox}}W/L}}({I_{SS}} - 2\sqrt {{I_{D1}}{I_{D2}}} ) (Vin1−Vin2)2=μnCoxW/L2(ISS−2ID1ID2)
又 4 I D 1 I D 2 = ( I D 1 + I D 2 ) 2 − ( I D 1 − I D 2 ) 2 = I S S 2 − ( I D 1 − I D 2 ) 2 4{I_{D1}}{I_{D2}} = {({I_{D1}} + {I_{D2}})^2} - {({I_{D1}} - {I_{D2}})^2} = {I_{SS}}^2 - {({I_{D1}} - {I_{D2}})^2} 4ID1ID2=(ID1+ID2)2−(ID1−ID2)2=ISS2−(ID1−ID2)2
代入,最后计算得:
I D 1 − I D 2 = 1 2 μ n C o x W L ( V i n 1 − V i n 2 ) 4 I S S μ n C o x W / L − ( V i n 1 − V i n 2 ) 2 {I_{D1}} - {I_{D2}} = \frac{1}{2}{\mu _n}{C_{ox}}\frac{W}{L}\left( {{V_{in1}} - {V_{in2}}} \right)\sqrt {\frac{{4{I_{SS}}}}{{{\mu _n}{C_{ox}}W/L}} - {{\left( {{V_{in1}} - {V_{in2}}} \right)}^2}} ID1−ID2=21μnCoxLW(Vin1−Vin2)μnCoxW/L4ISS−(Vin1−Vin2)2
定义
{ I D 1 − I D 2 = I d , d i f f V i n 1 − V i n 2 = V i n , d i f f \left\{ \begin{array}{l} {I_{D1}} - {I_{D2}} = {I_{d,diff}}\\ {V_{in1}} - {V_{in2}} = {V_{in,diff}} \end{array} \right. {ID1−ID2=Id,diffVin1−Vin2=Vin,diff
同单端分析相似,我们得到差放的等效跨导Gm:
G m = ∂ I D , d i f f ∂ V i n , d i f f = 1 2 μ n C o x W L 4 I S S μ n C o x W / L − 2 V i n , d i f f 2 4 I S S μ n C o x W / L − V i n , d i f f 2 {G_m} = \frac{{\partial {I_{D,diff}}}}{{\partial {V_{in,diff}}}} = \frac{1}{2}{\mu _n}{C_{ox}}\frac{W}{L}\frac{{\frac{{4{I_{SS}}}}{{{\mu _n}{C_{ox}}W/L}} - 2V_{in,diff}^2}}{{\sqrt {\frac{{4{I_{SS}}}}{{{\mu _n}{C_{ox}}W/L}} - V_{in,diff}^2} }} Gm=∂Vin,diff∂ID,diff=21μnCoxLWμnCoxW/L4ISS−Vin,diff2μnCoxW/L4ISS−2Vin,diff2
并且我们令 ∣ v i n , d i f f ∣ ≥ 2 I S S μ n C o x W / L \left| {{v_{in,diff}}} \right| \ge \sqrt {\frac{{2{I_{SS}}}}{{{\mu _n}{C_{ox}}W/L}}} ∣vin,diff∣≥μnCoxW/L2ISS时,Gm=0,因为大于这个值时,Gm的负值没有物理意义。

差分输入电压与差分电流的关系

差分输入电压与等效跨导Gm的关系(对上图求导)
同时,M1、M2管的过驱动电压Vod又可以表示为:
V o d = 2 I D μ n C o x W / L = I S S μ n C o x W / L {V_{od}} = \sqrt {\frac{{2{I_D}}}{{{\mu _n}{C_{ox}}W/L}}} = \sqrt {\frac{{{I_{SS}}}}{{{\mu _n}{C_{ox}}W/L}}} Vod=μnCoxW/L2ID=μnCoxW/LISS
即差分输入电压的范围可以表示为:
∣ v i n , d i f f ∣ ≤ 2 I S S μ n C o x W / L = 2 V o d \left| {{v_{in,diff}}} \right| \leq \sqrt {\frac{{2{I_{SS}}}}{{{\mu _n}{C_{ox}}W/L}}} = \sqrt{2}{V_{od}} ∣vin,diff∣≤μnCoxW/L2ISS=2Vod
上式说明差分输入的范围取决于M1、M2管的过驱动电压,为了获得大的输入摆幅,就需要大的过驱动电压。
从物理意义上,这个可以理解为:当差分信号相差 \sqrt{2}V_{od} 时,电流已经几乎分配到一边,另一边没有电流,再继续增大差分电压几乎对电流分配没有影响。
而当 V_{in,diff}=0 时,Gm化简为: {G_m} = \sqrt {{I_{SS}}{\mu n}{C{ox}}\frac{W}{L}} = \sqrt {2\frac{{{I_{SS}}}}{2}{\mu n}{C{ox}}\frac{W}{L}} = {g_{m1}} = {g_{m2}} \由上式可知,当在共模电位上加一个差模小信号 \Delta v_{in,diff} 时,此时等效跨导达到最大且为Gm=gm1=gm2,产生的差分电流为 i_{d,diff} = G_m \Delta v_{in,diff} ,差分电流导致差分输出电压为 -G_m \Delta v_{in,diff}R_D 。过程描述如下:
1、一边增加了 \Delta v_{in,diff}/2 ,而另一边减少了 \Delta v_{in,diff}/2 ;
2、则一边的电流增加了 G_m \Delta v_{in,diff}/2 ,另一边减小了 G_m \Delta v_{in,diff}/2 ;
3、导致一边的电阻多分压 G_m \Delta v_{in,diff}R_D/2 ,另一边少分压 G_m \Delta v_{in,diff}R_D/2 ;
4、最后一边的Vout降低 G_m \Delta v_{in,diff}R_D/2 ,另一边增加 G_m \Delta v_{in,diff}R_D/2 ;
根据上面分析,当 V_{in,diff}=0 时,差模增益有最大值为: {A_{v,diff}} = - {G_m}{R_D} = - \sqrt {{I_{SS}}{\mu n}{C{ox}}\frac{W}{L}} {R_D} \
从前面的计算我们知道Gm可以表示为: {G_m} = \frac{{\partial {I_{D,diff}}}}{{\partial {V_{in,diff}}}} = \frac{1}{2}{\mu n}{C{ox}}\frac{W}{L}\frac{{\frac{{4{I_{SS}}}}{{{\mu n}{C{ox}}W/L}} - 2V_{in,diff}^2}}{{\sqrt {\frac{{4{I_{SS}}}}{{{\mu n}{C{ox}}W/L}} - V_{in,diff}^2} }} \
下面我们看一下改变Iss和W/L对Gm的影响:
1、Iss的影响:更大的Iss使得当电流仅流过一边电路时有更大的值,同时更大的Iss能带来更大的跨导。

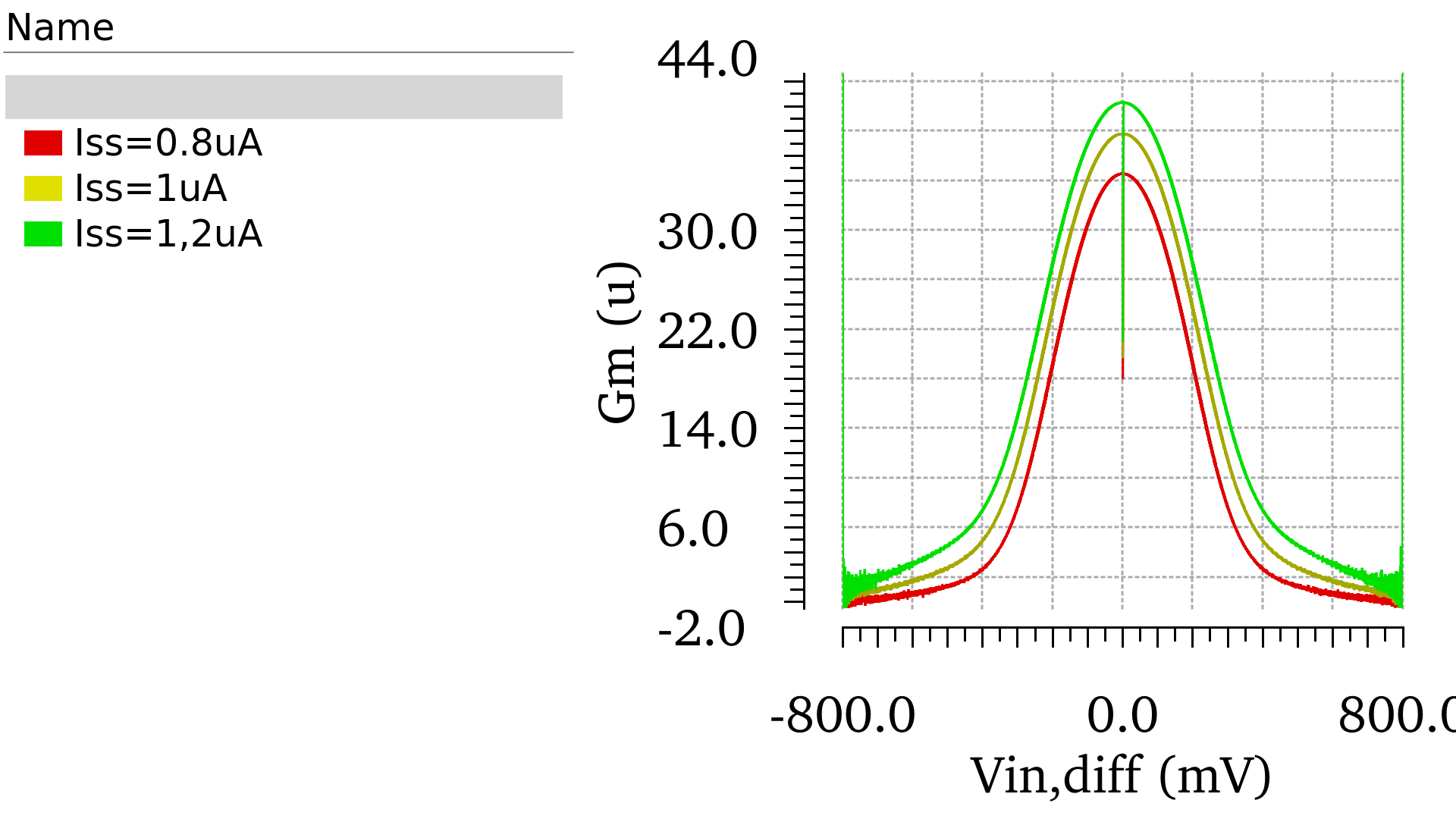
2、W/L的影响:更大的W/L使得对于相同的vin,diff而言,电流变化更大,使得电流更快地被分配,因此增加了有效跨导Gm,但同时也减低了Vin,diff的输入摆幅(因为电流更快地被分配到某一边了)。


2.3.2 小信号分析——半边电路法
上面的大信号分析详细地计算了等效跨导及差模增益,下面我们用小信号进行半边电路法分析:

首先,我们分析P点的情况:在小信号时,若左边输入为+vin,右边输入-vin,若认为gm1=gm2,那么两边的增减的电流正好抵消,总电流没有变化,M3的状态不变,Vp没有波动。因此我们可以近似地认为P点为交流地。
那么,在分析小信号时,原本的电路可以等效为右图的结构,M1、M2可以被视为两个CS AMP的结构: \left{ \begin{array}{l} \frac{{{v_{out1}}}}{{{v_{in1}}}} = - {g_{m1}}{R_D}\ \frac{{{v_{out2}}}}{{{v_{in2}}}} = {g_{m2}}{R_D} \end{array} \right. \ 那么差模增益为: {A_{v,DM}} = \frac{{{v_{out1}} - {v_{out2}}}}{{{v_{in}} - ( - {v_{in}})}} = \frac{{{v_{out1}}}}{{2{v_{in}}}} - \frac{{{v_{out2}}}}{{2{v_{in}}}} = - \frac{1}{2}({g_{m1}} + {g_{m2}}){R_D} = - {g_m}{R_D} \ 2.3.3 P点的详细分析
上面的小信号分析中,我们认为相反的小差分信号增减的电流相同,所有不改变总电流,使得Vp不变。而实际上,若差分输入不是小信号,那我们必须考虑到gm的特性:

当差分输入是小信号时,我们可以忽视Vin对直流工作点的影响,认为±vin导致的电流增减相同;但当差分输入是大信号时,就需要考虑Vin对直流工作点的影响:可以看到,当一边输入+vin时,这一边的gm增大;另一边输入-vin,gm减小,所以实际上+vin产生的电流是大于-vin减小的电流的。因此,Vp上升,一方面是降低+vin管子的Vod(降低VGS和提高VTH),另一方面是提高电流源管的沟道长度调制效应,使得流过M3的电流也会略有提高。

从上图可以看到,和之前分析的一样,由于提高的电流总是大于降低的电流,使得电压源上方的Vp总是会随着多出来的电流一起变化。
同时,我们可以发现,Vp的频率其实是为vin的两倍,因此,这种结构还可以用来做简单的倍频器。
6.2.4 带源极负反馈的差动对

带源极负反馈的差动对及其半边电路
从这种结构的小信号的半边电路可以发现,这种结构使得半边电路从原来的CS AMP变为带源极负反馈的CS AMP,这种结构在单端放大器中已经分析过,其优点为提高跨导的线性度,代价是降低了跨导的值:
g m 1 = g m 2 = g m , e f f = 1 1 g m + R s {g_{m1}} = {g_{m2}} = {g_{m,eff}} = \frac{1}{{\frac{1}{{{g_m}}} + {R_s}}} gm1=gm2=gm,eff=gm1+Rs1
此时,输入信号的范围也被提高:
∣ v i n , d i f f ∣ ≥ 2 I S S μ n C o x W / L + I S S R S = 2 V o d + I S S R S \left| {{v_{in,diff}}} \right| \ge \sqrt {\frac{{2{I_{SS}}}}{{{\mu _n}{C_{ox}}W/L}}} + {I_{SS}}{R_S} = \sqrt 2 {V_{od}} + {I_{SS}}{R_S} ∣vin,diff∣≥μnCoxW/L2ISS+ISSRS=2Vod+ISSRS
但是这种结构在直流情况下,Rs上会有一定的压降,将M1、M2的源极电压抬高,使其更容易进入线性区,导致Vout的摆幅降低。
为了解决直流压降的问题,一种实用的结构被提出:

带源极负反馈的差放的实用电路
对于上图中的结构,在直流情况下,电流不流过2Rs,只有当两边电流有变动时,电流才会流过中间电阻。而这种结构的小信号交流地位于2Rs中间,因此其小信号等效电路为右图,同之前的结构一样。但是这种结构避免了Rs的直流压降,不会导致输出摆幅降低。


上面的仿真中,后缀带R的代表是带源极负反馈的结果,没有R后缀的是普通的差放输出结果作为参照。
可以看到,由于Rs提高了Gm的线性度,那么也提高了Vout的线性度。
当正常工作在理想情况下,VCM的变化不会引起电流的变化,因此输出电压也不会变化。
6.3.1 非理想因素
1、有限的电流源输出阻抗
由于MOS电流源的沟道长度调制效应,尾电流源的输出阻抗不是无穷大(普通电流镜是ro,Cascode电流镜是 g_mr_o^2 )。这就导致随着共模电压VCM提高,为了保证电流不变,Vp提高(降低VGS,衬偏效应->提高Vth),但在Vp提高的同时,电流源流过的电流会逐渐增大,但此时两边RD相等,所以输出电压没有差分输出:
V C M ↑ ⇒ I D ↑ ⇒ I D R D ↑ ⇒ V o u t ↓ ⇒ Δ V o u t = 0 {V_{CM}} \uparrow \Rightarrow {I_D} \uparrow \Rightarrow {I_D}{R_D} \uparrow \Rightarrow {V_{out}} \downarrow \Rightarrow \Delta {V_{out}} = 0 VCM↑⇒ID↑⇒IDRD↑⇒Vout↓⇒ΔVout=0
2、差动对失配(不对称)
不对称的可能包括W/L,阈值电压VTH,电阻RD
6.3.2 多个非理想因素的共同效果——失调
若以上两种非理想因素同时存在,则会导致电路的失调。
当VCM波动,左右两边产生的电流波动不同,Iss的增量被不平均地分配,不同的电流流过不同的电阻又会引起两边输出电压Vout不同的波动: Δ V C M ⇒ Δ I D 1 ≠ Δ I D 2 ⇒ Δ I D 1 R D 1 ≠ Δ I D 2 R D 2 ⇒ Δ V o u t ≠ 0 \Delta {V_{CM}} \Rightarrow \Delta {I_{D1}} \ne \Delta {I_{D2}} \Rightarrow \Delta {I_{D1}}{R_{D1}} \ne \Delta {I_{D2}}{R_{D2}} \Rightarrow \Delta {V_{out}} \ne 0 ΔVCM⇒ΔID1=ΔID2⇒ΔID1RD1=ΔID2RD2⇒ΔVout=0
这样导致共模电压的变化引起差模的输出变化,这不是我们想要的。
6.3.3 失调的计算
6.3.3.1 有限的电流源电阻

从P点看下去,M3可以视为一个大电阻ro
当仅考虑共模输入时,可以将电路结构等效为右图的结构,其中 g m , e f f = g m 1 + g m 2 = 2 g m {g_{m,eff}} = {g_{m1}} + {g_{m2}} = 2{g_m} gm,eff=gm1+gm2=2gm, R D ∥ R D = R D / 2 {R_D}\parallel {R_D} = {R_D}/2 RD∥RD=RD/2 。
直接用单端AMP的结论,那么对于共模输入,电路的共模输出增益为:
A v , C M = v o u t , C M v i n , C M = 1 1 2 g m + r o R D / 2 {A_{v,CM}} = \frac{{{v_{out,CM}}}}{{{v_{in,CM}}}} = \frac{1}{{\frac{1}{{2{g_m}}} + {r_o}}}{R_D}/2 Av,CM=vin,CMvout,CM=2gm1+ro1RD/2
当ro趋近于+∞时,共模增益趋近于0。
6.3.3.2 RD失配

当仅考虑RD的失配时 R D 2 = R D 1 + Δ R D {R_{D2}} = {R_{D1}} + \Delta {R_D} RD2=RD1+ΔRD,若共模电压产生一个波动 Δ V i n , C M \Delta V_{in,CM} ΔVin,CM,则会引起电流变化 Δ I t o t a l = G m Δ V i n , C M = 1 1 g m , e f f + r o Δ V i n , C M = g m 1 + g m 2 1 + ( g m 1 + g m 2 ) r o Δ V i n , C M \Delta {I_{total}} = {G_m}\Delta {V_{in,CM}} = \frac{1}{{\frac{1}{{{g_{m,eff}}}} + {r_o}}}\Delta {V_{in,CM}} = \frac{{{g_{m1}} + {g_{m2}}}}{{1 + ({g_{m1}} + {g_{m2}}){r_o}}}\Delta {V_{in,CM}} ΔItotal=GmΔVin,CM=gm,eff1+ro1ΔVin,CM=1+(gm1+gm2)rogm1+gm2ΔVin,CM
其中,M1、M2的电流可以单独表示为: { Δ I D 1 = G m Δ V i n , C M = g m 1 1 + ( g m 1 + g m 2 ) r o Δ V i n , C M Δ I D 2 = G m Δ V i n , C M = g m 2 1 + ( g m 1 + g m 2 ) r o Δ V i n , C M \left\{ \begin{array}{l} \Delta {I_{D1}} = {G_m}\Delta {V_{in,CM}} = \frac{{{g_{m1}}}}{{1 + ({g_{m1}} + {g_{m2}}){r_o}}}\Delta {V_{in,CM}}\\ \Delta {I_{D2}} = {G_m}\Delta {V_{in,CM}} = \frac{{{g_{m2}}}}{{1 + ({g_{m1}} + {g_{m2}}){r_o}}}\Delta {V_{in,CM}} \end{array} \right. {ΔID1=GmΔVin,CM=1+(gm1+gm2)rogm1ΔVin,CMΔID2=GmΔVin,CM=1+(gm1+gm2)rogm2ΔVin,CM
则输出电压的变化为:
{ Δ V o u t 1 = Δ I D 1 R D = g m 1 1 + ( g m 1 + g m 2 ) r o Δ V i n , C M R D Δ V o u t 2 = Δ I D 2 ( R D + Δ R D ) = g m 2 1 + ( g m 1 + g m 2 ) r o Δ V i n , C M ( R D + Δ R D ) \left\{ \begin{array}{l} \Delta {V_{out1}} = \Delta {I_{D1}}{R_D} = \frac{{{g_{m1}}}}{{1 + ({g_{m1}} + {g_{m2}}){r_o}}}\Delta {V_{in,CM}}{R_D}\\ \Delta {V_{out2}} = \Delta {I_{D2}}({R_D} + \Delta {R_D}) = \frac{{{g_{m2}}}}{{1 + ({g_{m1}} + {g_{m2}}){r_o}}}\Delta {V_{in,CM}}({R_D} + \Delta {R_D}) \end{array} \right. {ΔVout1=ΔID1RD=1+(gm1+gm2)rogm1ΔVin,CMRDΔVout2=ΔID2(RD+ΔRD)=1+(gm1+gm2)rogm2ΔVin,CM(RD+ΔRD)
那么差分输出电压为(近似地认为gm1=gm2=gm):
V o u t , d i f f = Δ V o u t 1 − Δ V o u t 2 ≈ g m 1 + 2 g m r o Δ R D ∗ Δ V i n , C M {V_{out,diff}} = \Delta {V_{out1}} - \Delta {V_{out2}} \approx \frac{{{g_m}}}{{1 + 2{g_m}{r_o}}}\Delta {R_D}*\Delta {V_{in,CM}} Vout,diff=ΔVout1−ΔVout2≈1+2gmrogmΔRD∗ΔVin,CM
6.3.3.3 M1、M2失配
在工艺制造中,MOS管的宽长比W/L以及阈值电压VTH可能会有误差从而导致跨导gm的误差,最终使得电路失配。
由上面分析可知,当Vin,CM波动时,两边的电流波动可以表示为:
{ Δ I D 1 = G m Δ V i n , C M = g m 1 1 + ( g m 1 + g m 2 ) r o Δ V i n , C M Δ I D 2 = G m Δ V i n , C M = g m 2 1 + ( g m 1 + g m 2 ) r o Δ V i n , C M \left\{ \begin{array}{l} \Delta {I_{D1}} = {G_m}\Delta {V_{in,CM}} = \frac{{{g_{m1}}}}{{1 + ({g_{m1}} + {g_{m2}}){r_o}}}\Delta {V_{in,CM}}\\ \Delta {I_{D2}} = {G_m}\Delta {V_{in,CM}} = \frac{{{g_{m2}}}}{{1 + ({g_{m1}} + {g_{m2}}){r_o}}}\Delta {V_{in,CM}} \end{array} \right. {ΔID1=GmΔVin,CM=1+(gm1+gm2)rogm1ΔVin,CMΔID2=GmΔVin,CM=1+(gm1+gm2)rogm2ΔVin,CM
那么,两边流过电流之差为:
Δ I D 1 − Δ I D 2 = G m Δ V i n , C M = g m 1 − g m 2 1 + ( g m 1 + g m 2 ) r o Δ V i n , C M \Delta {I_{D1}} - \Delta {I_{D2}} = {G_m}\Delta {V_{in,CM}} = \frac{{{g_{m1}} - {g_{m2}}}}{{1 + ({g_{m1}} + {g_{m2}}){r_o}}}\Delta {V_{in,CM}} ΔID1−ΔID2=GmΔVin,CM=1+(gm1+gm2)rogm1−gm2ΔVin,CM
电流差导致的输出电压只差为:
Δ V o u t 1 − Δ V o u t 2 = − Δ I D 1 R D − ( − Δ I D 2 R D ) = − ( Δ I D 1 − Δ I D 2 ) R D \Delta {V_{out1}} - \Delta {V_{out2}} = - \Delta {I_{D1}}{R_D} - ( - \Delta {I_{D2}}{R_D}) = - \left( {\Delta {I_{D1}} - \Delta {I_{D2}}} \right){R_D} ΔVout1−ΔVout2=−ΔID1RD−(−ΔID2RD)=−(ΔID1−ΔID2)RD
定义共模到差模的增益 A C M _ D M A_{CM\_DM} ACM_DM 为:
A C M _ D M = Δ V o u t 1 − Δ V o u t 2 Δ V i n , C M = v o u t , d i f f v i n , C M = − g m 1 − g m 2 1 + ( g m 1 + g m 2 ) r o R D {A_{CM\_DM}} = \frac{{\Delta {V_{out1}} - \Delta {V_{out2}}}}{{\Delta {V_{in,CM}}}} = \frac{{{v_{out,diff}}}}{{{v_{in,CM}}}} = - \frac{{{g_{m1}} - {g_{m2}}}}{{1 + ({g_{m1}} + {g_{m2}}){r_o}}}{R_D} ACM_DM=ΔVin,CMΔVout1−ΔVout2=vin,CMvout,diff=−1+(gm1+gm2)rogm1−gm2RD
而这种增益是我们不想要的,需要我们想办法减小。
6.3.3.4 同时考虑RD和MOS的失配
两边同时流过的电流之差仍然为: Δ I D 1 − Δ I D 2 = G m Δ V i n , C M = g m 1 − g m 2 1 + ( g m 1 + g m 2 ) r o Δ V i n , C M \Delta {I_{D1}} - \Delta {I_{D2}} = {G_m}\Delta {V_{in,CM}} = \frac{{{g_{m1}} - {g_{m2}}}}{{1 + ({g_{m1}} + {g_{m2}}){r_o}}}\Delta {V_{in,CM}} ΔID1−ΔID2=GmΔVin,CM=1+(gm1+gm2)rogm1−gm2ΔVin,CM
但由于两边电阻的失配,导致两边的输出电压之差有所变化: Δ V o u t 1 − Δ V o u t 2 = − Δ I D 1 R D − [ − Δ I D 2 ( R D + Δ R D ) ] = − ( Δ I D 1 − Δ I D 2 ) R D + Δ I D 2 Δ R D \Delta {V_{out1}} - \Delta {V_{out2}} = - \Delta {I_{D1}}{R_D} - [ - \Delta {I_{D2}}({R_D} + \Delta {R_D})] = - \left( {\Delta {I_{D1}} - \Delta {I_{D2}}} \right){R_D} + \Delta {I_{D2}}\Delta {R_D} ΔVout1−ΔVout2=−ΔID1RD−[−ΔID2(RD+ΔRD)]=−(ΔID1−ΔID2)RD+ΔID2ΔRD
那么最终的共模到差模的增益为: A C M _ D M = − g m 1 − g m 2 1 + ( g m 1 + g m 2 ) r o R D + g m 2 1 + ( g m 1 + g m 2 ) r o Δ R D {A_{CM\_DM}} = - \frac{{{g_{m1}} - {g_{m2}}}}{{1 + ({g_{m1}} + {g_{m2}}){r_o}}}{R_D} + \frac{{{g_{m2}}}}{{1 + ({g_{m1}} + {g_{m2}}){r_o}}}\Delta {R_D} ACM_DM=−1+(gm1+gm2)rogm1−gm2RD+1+(gm1+gm2)rogm2ΔRD
6.3.4 CMRR (Common Mode Rejection Ratio)共模抑制比
首先,我们令gm为平均跨导,以及gm1、gm2的偏差为:
{ g m = ( g m 1 + g m 2 ) / 2 Δ g m = g m 1 − g m 2 \left\{ \begin{array}{l} {g_m} = ({g_{m1}} + {g_{m2}})/2\\ \Delta {g_m} = {g_{m1}} - {g_{m2}} \end{array} \right. {gm=(gm1+gm2)/2Δgm=gm1−gm2
那么共模抑制比CMRR为: C M R R = ∣ A D M A C M _ D M ∣ = g m R D ∣ Δ g m R D 1 + 2 g m r o ∣ = g m ∣ Δ g m ∣ ( 1 + 2 g m r o ) CMRR = \left| {\frac{{{A_{DM}}}}{{{A_{CM\_DM}}}}} \right| = \frac{{{g_m}{R_D}}}{{\left| {\frac{{\Delta {g_m}{R_D}}}{{1 + 2{g_m}{r_o}}}} \right|}} = \frac{{{g_m}}}{{\left| {\Delta {g_m}} \right|}}(1 + 2{g_m}{r_o}) CMRR= ACM_DMADM = 1+2gmroΔgmRD gmRD=∣Δgm∣gm(1+2gmro)
共模抑制比是差模增益/共模到差模的增益,差模增益是我们所需要的,而共模到差模的增益是我们不想要的,因此这个比值越大越好。(工程上也可以是反过来的比例)
参考
https://zhuanlan.zhihu.com/p/937307533