数字图像处理与OpenCV初探
什么是数字图像处理?
当今时代,数字图像无处不在。手机拍照、安防监控、医疗检查、地图导航、工业质检……我们每天都在接收、分析和处理大量图像信息。对于计算机而言,图像并不是一张“看得懂”的照片,而是由数值组成的矩阵。如何让机器也具备“看图”的能力,正是数字图像处理的核心目标。
简而言之,数字图像处理就是用计算机对图像进行操作和分析,让图像更“清晰”、更“有用”、更“可识别”。举例如下:
- 拍完照后用手机“自动美颜”一下,可能用到了滤波、边缘平滑、肤色增强等图像处理算法;
- 医生查看 CT 或眼底图时,图像可能经过了对比度增强或伪彩色处理,使细节更加清晰;
- 摄像头识别车辆车牌,需要经过颜色识别、轮廓识别、字符识别等操作;
什么是OpenCV?
OpenCV(Open Source Computer Vision Library)是一个开源、跨平台的计算机视觉库,最初由英特尔开发,现在已经成为业界和学术界广泛使用的工具之一。OpenCV有如下特性:
- 跨平台:支持 Windows、Linux、macOS
- 语言支持丰富:C++/Python 作为主流语言选择,也有部分选择Java、JavaScript等
- 实时性强:底层基于 C/C++,速度快,能胜任对性能要求高的实时应用
- 功能强大:从图像读取到复杂特征匹配,从边缘检测到深度学习支持等
在我们的专栏中,我们的示例主要使用C++,这是工程领域中最合适的使用方式。C++提供的卓越的性能,可以满足很多实时性的应用需求。同时,我们也会适当给出一些Python示例,在深度学习训练阶段,Python是我们的首选语言(一般选择pytorch框架)。OpenCV可以对深度学习进行数据预处理支持。
对于OpenCV的安装,Python环境下只需要运行以下命令即可:
pip install opencv-python对于C++环境,我们一般都是从源码直接编译,然后再部署到自己的开发环境中。我们这里不讲如何源码编译,大家可以在网上自行搜索。我们稍后会提供一个完整的C++项目,该项目会包含OpenCV所有的依赖库,大家可以基于该项目进行自己的开发工作。
数字图像基本结构
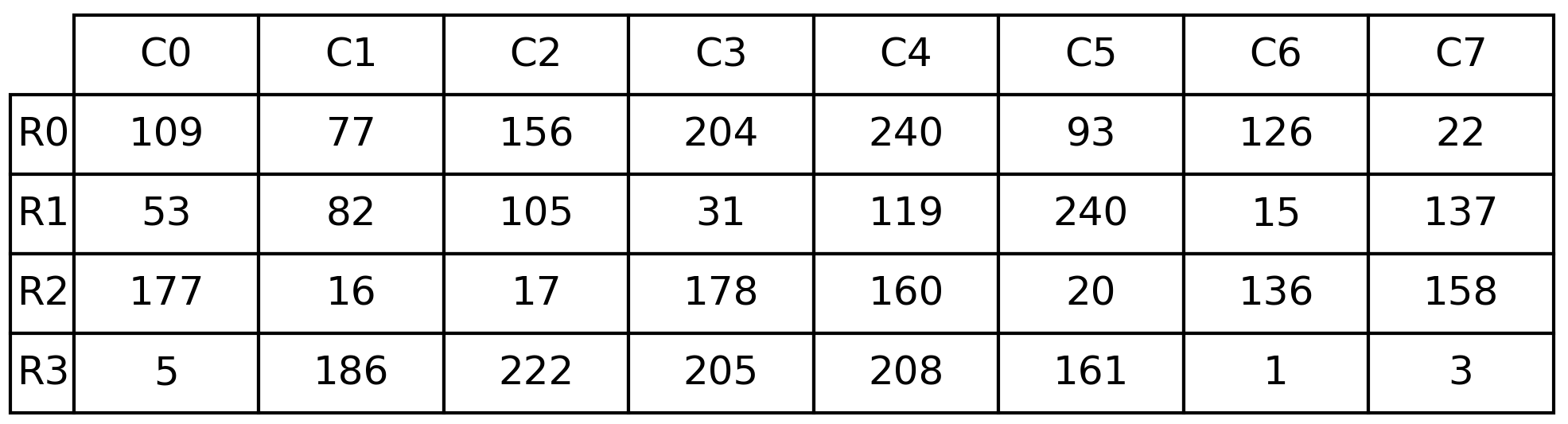
上图为一个4行8列的矩阵,每个元素的取值范围为[0,256)。我们可以将其看作为一个4*8的灰度图像,灰度图像的取值范围为[0,256)。在现实生活中,我们更多看到的是彩色图像,彩色图像相对于灰度图像来说,每个元素需要3个值表示,分别代表Red,Green和Blue,其数据矩阵如下:

以上同样为一个4行8列的矩阵,但每个元素由一个3*1的向量构成,如第0行0列的向量值为[172,47,117],这三个元素具体表示:Blue=172,Green=47,Red=117。特别注意这里的通道排列顺序为BGR,而在生活中我们习惯称呼彩色图像为RGB图像。
OpenCV提供了函数cv::imread(),该函数可读取多种格式图像,如JPG, BMP, PNG等,其返回值为cv::Mat对象,该对象保存了图像相关的所有信息。不论读取哪种格式图像,只要该图像为三通道数据,读取后的图像在内存中的排列顺序均为BGR(四通道多为BGRA,A表示Alpha通道,用于记录半透明相关信息)。
OpenCV提供了函数cv::imshow(),该函数用于显示图像,其核心参数为cv::Mat对象。我们通过一个实验来加深通道排列顺序的理解。
import cv2 #导入opencv,可用于读取与显示图像
import matplotlib.pyplot as plt #用于图像显示img_bgr = cv2.imread('lena.png') #读取图像, 默认通道为bgrif img_bgr is None:print("图像加载失败,请检查路径是否正确。")
else:img_rgb = cv2.cvtColor(img_bgr, cv2.COLOR_BGR2RGB) # 转换为rgb顺序cv2.imshow('opencv show', img_bgr) #使用opencv显示图像cv2.waitKey(0) #opencv需要调用该函数已阻止程序继续执行cv2.destroyAllWindows() #用户关闭图像窗口后清除资源#使用matplot显示图像,这里需要传入rgb顺序图像plt.imshow(img_rgb)plt.title("matplot show")plt.show()以上一段python代码首先使用OpenCV读取一张图像,然后分别使用OpenCV与matplot库进行显示。需要特别注意,在matplot库中,默认将通道顺序解读为RGB。因此,我们调用了cvtColor函数对其进行通道转换(cv2.COLOR_BGR2RGB),使得matplot可以正确显示图像颜色。以下分别给出正确通道顺序显示结果与错误通道顺序显示结果。


接下来我们给出一段C++代码,该代码实现了图像读取与显示,处理语法上的差异,与python代码基本一致。
int main()
{cv::Mat img_bgr = cv::imread("lena.png", cv::IMREAD_COLOR);cv::imshow("opencv show", img_bgr);cv::waitKey(0);cv::destroyAllWindows();return 0;
}数字图像元素读取与修改
到目前为止,我们了解了图像数据的基本结构,也能正确读取和显示图像。那么,我们应该如何读取或修改图像单个元素数据呢?
有如下方法可以读取或修改图像像素数据(C++),如下:
- 使用cv::Mat.at<>()方法,该方法适合读取少量数据。由于函数会进行边界检查,其速度较慢,在图像处理算法实践中,我们基本不会使用该函数读取数据。以下给出示例代码
{ // 读取100行,150列数据,该数据为三通道数据cv::Vec3b val = img_bgr.at<cv::Vec3b>(100, 150); uchar b = val[0];uchar g = val[1];uchar r = val[2];// 读取单通道数据(即灰度图)uchar gray = img_bgr.at<uchar>(100, 150);
}- 在实际项目中,我们总是直接访问指针以获得最佳的访问效率,以下给出示例代码
{// // 3通道图像(bgr)访问// 遍历每一行for (int row = 0; row < img_bgr.rows; ++row){// 获取每一行的起始指针cv::Vec3b* ptr = img_bgr.ptr<cv::Vec3b>(row);// 遍历每一个元素(cv::Vec3b)for (int col = 0; col < img_bgr.cols; ++col){// 获取每个通道的值uchar b = ptr[col][0];uchar g = ptr[col][1];uchar r = ptr[col][2];// 每个通道亮度*2// 由于每个通道取值范围为[0,255],因此需要确保不越界!b = b * 2 > 255 ? 255 : b * 2;g = g * 2 > 255 ? 255 : g * 2;r = r * 2 > 255 ? 255 : r * 2;// 将修改后值赋给原通道ptr[col][0] = b;ptr[col][1] = g;ptr[col][2] = r;}}// // 单通道(灰度图像)访问// 遍历每一行for (int row = 0; row < img_bgr.rows; ++row){// 获取每一行的起始指针uchar* ptr = img_bgr.ptr<uchar>(row);// 遍历每一个元素(uchar)for (int col = 0; col < img_bgr.cols; ++col){// 获取灰度值uchar gray = ptr[col];// 每个通道亮度*2// 由于取值范围为[0,255],因此需要确保不越界!gray = gray * 2 > 255 ? 255 : gray * 2;// 将修改灰度值赋给原图像ptr[col] = gray;}}
}通过以上程序,我们可以得到一个亮度更高的图像,效果如下:

虽然直接访问指针可以获得最佳的运行效率,然而我们也可能因为访问不当而产生以下不良后果,典型错误为内存越界错误,这可能导致整个程序崩溃。所以,在实际项目中,我们需要慎重使用指针,确保代码正确性以避免内存越界错误!
另外,一些性能优化的常识可以让我们避免一些极端低效的代码,如下代码大大降低运行效率:
{// 该代码运行效率会非常低,由于违背了内存连续性访问原则,// 导致频繁的缓存命中失败,严重降低数据访问效率!// 遍历每一列for (int col = 0; col < img_bgr.cols; ++col){// 遍历每一行for (int row = 0; row < img_bgr.rows; ++row){cv::Vec3b val = img_bgr.ptr<cv::Vec3b>(row)[col];uchar b = val[0];uchar g = val[1];uchar r = val[2];}}
}观察以上代码,我们for循环顺序发生了改变,该代码对图像元素的访问顺序为:
0行0列->1行0列->2行0列...->0行1列->1行1列->2行1列....
也就是说在列方向上遍历,而图像元素在行方向上连续存储,从而每次访问都可能导致缓存命中失败,从而严重影响访问效率!
一般情况下,C++提供了非常灵活的图像数据读取方式,有时候我们可能也会使用Python进行少量的数据读取操作,以下给出使用Python读取图像数据的方法:
(b, g, r) = img_bgr[100, 150] #获取第100行第150列的B、G、R通道值
blue_channel = img_bgr[:, :, 0] #获取蓝通道数据cv::Mat关键元素
cv::Mat是 OpenCV中最核心的数据结构之一,用于表示图像、视频帧、矩阵等二维数据。理解 cv::Mat的内部结构对于高效图像处理非常关键。早期的C接口使用IplImage结构,除了兼容需求,我们不再使用IplImage接口了。
以下是cv::Mat的基本数据结构:
cv::Mat
├── data → 指向图像数据的指针
├── rows → 行数(即图像高度)
├── cols → 列数(即图像宽度)
├── step → 每行占用的字节数(stride)
├── channels → 通道数(通过 type 解析)
├── type → 数据类型和通道数的编码
├── depth() → 每个通道的数据类型(如 CV_8U)
├── refcount → 引用计数指针(实现共享内存)
└── others → flags、allocator 等
data为一个uchar*类型数据,指向图像像素数据的首地址,可以直接通过指针操作像素,如:
uchar* p = img_bgr.data; p[0] = 255; p[1] = 255;rows和cols分别代表图像的行数与列数,也即图像的高度与宽度。
step表示图像每一行占用的总字节数,利用该数据可以准确跳转到每行数据首指针上,以下两种写法均可以跳转到第10行首指针处,故data1与data2为相等指针。
cv::Vec3b* data1 = (cv::Vec3b*)(img_bgr.data + img_bgr.step * 10);
cv::Vec3b* data2 = img_bgr.ptr<cv::Vec3b>(10);type()函数返回一个整数,该整数编码了通道数与数据类型信息。一般情况下,我们可以分别调用channels()与depth()函数来分别获取通道数与数据类型。
在常规数字图像中,通道数一般返回为1,3,4通道数据,分别表示灰度图,真彩色,带Alpha通道真彩色。当然,在其他应用中,也可以返回任意通道,如2通道可以编码图像梯度信息。
图像数据类型主要定义了数据精度与数据符号,如CV_8U为8位无符号整数,CV_8S为8位有符号整数,CV_16U/CV_16S定义了16位整数,CV_32S定义了32位有符号整数(注意没有CV_32U!),CV_32F/CV_64F分别定义了单精度与双精度浮点类型。
int depth = img_bgr.depth();
int channels = img_bgr.channels();elemSize()表示一个像素占用的字节数,elemSize1()表示一个通道占用的字节数,使用elemSize() / elemSize1()可计算处通道数,等价于channnels()函数。
refcount作为内存引用计数,在浅拷贝时共享内存数据,仅增加引用计数,代码如下:
cv::Mat img = cv::imread("lena.png", cv::IMREAD_COLOR);int* ref = img.refcount; // 引用计数为1cv::Mat img2 = img; //浅拷贝,img与img2公用内存int* ref2 = img2.refcount; // 浅拷贝后引用计数增加到2img.release(); // 释放img,引用计数减1int* ref3 = img2.refcount; // 释放img后,引用计数减少到1除了浅拷贝之外,我们在很多时候有深拷贝需求(即不共享内存数据),函数copyTo()与clone()均可实现该目标,代码如下:
// 方式 1:clone(返回新对象)
cv::Mat img_clone = img.clone();// 方式 2:copyTo(拷贝到已有对象)
cv::Mat img_copy;
img.copyTo(img_copy);结语
通过介绍数字图像处理与OpenCV的基本知识,我们理解了数字图像的基本结构,以及如何高效的访问图像中的任意元素。同时对通道顺序以及内存连续性问题进行特别讲解,使得我们可以在工程实践中避免一些微妙的错误,提升程序的效率。最后,我们讲解了OpenCV中最为重要的数据结构cv::Mat,通过该数据结构,可以实现图像数据的所有基本操作。
在工程应用中,为了运行效率我们一般会选择OpenCV的C++接口。然而在某些情况下,Python接口也发挥了重要的作用。如在深度学习的训练过程中,我们一般使用pytorch框架。此时,使用OpenCV的Python接口进行数据预处理是非常必要的。因此,在博文中,我们同步给出了C++与Python代码片段,以适应不同应用场景需求。