6.11打卡
@浙大疏锦行
DAY 49 CBAM注意力
知识点回顾:
1. 通道注意力模块复习
2. 空间注意力模块
3. CBAM的定义
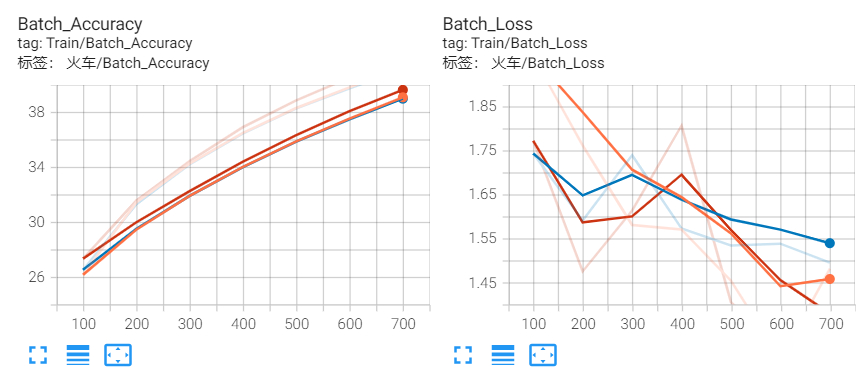
作业:尝试对今天的模型检查参数数目,并用tensorboard查看训练过程
import torch
import torch.nn as nn# 定义通道注意力
class ChannelAttention(nn.Module):def __init__(self, in_channels, ratio=16):"""通道注意力机制初始化参数:in_channels: 输入特征图的通道数ratio: 降维比例,用于减少参数量,默认为16"""super().__init__()# 全局平均池化,将每个通道的特征图压缩为1x1,保留通道间的平均值信息self.avg_pool = nn.AdaptiveAvgPool2d(1)# 全局最大池化,将每个通道的特征图压缩为1x1,保留通道间的最显著特征self.max_pool = nn.AdaptiveMaxPool2d(1)# 共享全连接层,用于学习通道间的关系# 先降维(除以ratio),再通过ReLU激活,最后升维回原始通道数self.fc = nn.Sequential(nn.Linear(in_channels, in_channels // ratio, bias=False), # 降维层nn.ReLU(), # 非线性激活函数nn.Linear(in_channels // ratio, in_channels, bias=False) # 升维层)# Sigmoid函数将输出映射到0-1之间,作为各通道的权重self.sigmoid = nn.Sigmoid()def forward(self, x):"""前向传播函数参数:x: 输入特征图,形状为 [batch_size, channels, height, width]返回:调整后的特征图,通道权重已应用"""# 获取输入特征图的维度信息,这是一种元组的解包写法b, c, h, w = x.shape# 对平均池化结果进行处理:展平后通过全连接网络avg_out = self.fc(self.avg_pool(x).view(b, c))# 对最大池化结果进行处理:展平后通过全连接网络max_out = self.fc(self.max_pool(x).view(b, c))# 将平均池化和最大池化的结果相加并通过sigmoid函数得到通道权重attention = self.sigmoid(avg_out + max_out).view(b, c, 1, 1)# 将注意力权重与原始特征相乘,增强重要通道,抑制不重要通道return x * attention #这个运算是pytorch的广播机制
## 空间注意力模块
class SpatialAttention(nn.Module):def __init__(self, kernel_size=7):super().__init__()self.conv = nn.Conv2d(2, 1, kernel_size, padding=kernel_size//2, bias=False)self.sigmoid = nn.Sigmoid()def forward(self, x):# 通道维度池化avg_out = torch.mean(x, dim=1, keepdim=True) # 平均池化:(B,1,H,W)max_out, _ = torch.max(x, dim=1, keepdim=True) # 最大池化:(B,1,H,W)pool_out = torch.cat([avg_out, max_out], dim=1) # 拼接:(B,2,H,W)attention = self.conv(pool_out) # 卷积提取空间特征return x * self.sigmoid(attention) # 特征与空间权重相乘
## CBAM模块
class CBAM(nn.Module):def __init__(self, in_channels, ratio=16, kernel_size=7):super().__init__()self.channel_attn = ChannelAttention(in_channels, ratio)self.spatial_attn = SpatialAttention(kernel_size)def forward(self, x):x = self.channel_attn(x)x = self.spatial_attn(x)return x
import torch
import torch.nn as nn
import torch.optim as optim
from torchvision import datasets, transforms
from torch.utils.data import DataLoader
import matplotlib.pyplot as plt
import numpy as np
from torch.utils.tensorboard import SummaryWriter
import os
import torchvision# 设置中文字体支持
plt.rcParams["font.family"] = ["SimHei"]
plt.rcParams['axes.unicode_minus'] = False # 解决负号显示问题# 检查GPU是否可用
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
print(f"使用设备: {device}")# 数据预处理(与原代码一致)
train_transform = transforms.Compose([transforms.RandomCrop(32, padding=4),transforms.RandomHorizontalFlip(),transforms.ColorJitter(brightness=0.2, contrast=0.2, saturation=0.2, hue=0.1),transforms.RandomRotation(15),transforms.ToTensor(),transforms.Normalize((0.4914, 0.4822, 0.4465), (0.2023, 0.1994, 0.2010))
])test_transform = transforms.Compose([transforms.ToTensor(),transforms.Normalize((0.4914, 0.4822, 0.4465), (0.2023, 0.1994, 0.2010))
])# 加载数据集(与原代码一致)
train_dataset = datasets.CIFAR10(root='./data', train=True, download=True, transform=train_transform)
test_dataset = datasets.CIFAR10(root='./data', train=False, transform=test_transform)
train_loader = DataLoader(train_dataset, batch_size=64, shuffle=True)
test_loader = DataLoader(test_dataset, batch_size=64, shuffle=False)
# CIFAR-10的类别名称
classes = ('plane', 'car', 'bird', 'cat', 'deer', 'dog', 'frog', 'horse', 'ship', 'truck')
# 定义带有CBAM的CNN模型
class CBAM_CNN(nn.Module):def __init__(self):super(CBAM_CNN, self).__init__()# ---------------------- 第一个卷积块(带CBAM) ----------------------self.conv1 = nn.Conv2d(3, 32, kernel_size=3, padding=1)self.bn1 = nn.BatchNorm2d(32) # 批归一化self.relu1 = nn.ReLU()self.pool1 = nn.MaxPool2d(kernel_size=2)self.cbam1 = CBAM(in_channels=32) # 在第一个卷积块后添加CBAM# ---------------------- 第二个卷积块(带CBAM) ----------------------self.conv2 = nn.Conv2d(32, 64, kernel_size=3, padding=1)self.bn2 = nn.BatchNorm2d(64)self.relu2 = nn.ReLU()self.pool2 = nn.MaxPool2d(kernel_size=2)self.cbam2 = CBAM(in_channels=64) # 在第二个卷积块后添加CBAM# ---------------------- 第三个卷积块(带CBAM) ----------------------self.conv3 = nn.Conv2d(64, 128, kernel_size=3, padding=1)self.bn3 = nn.BatchNorm2d(128)self.relu3 = nn.ReLU()self.pool3 = nn.MaxPool2d(kernel_size=2)self.cbam3 = CBAM(in_channels=128) # 在第三个卷积块后添加CBAM# ---------------------- 全连接层 ----------------------self.fc1 = nn.Linear(128 * 4 * 4, 512)self.dropout = nn.Dropout(p=0.5)self.fc2 = nn.Linear(512, 10)def forward(self, x):# 第一个卷积块x = self.conv1(x)x = self.bn1(x)x = self.relu1(x)x = self.pool1(x)x = self.cbam1(x) # 应用CBAM# 第二个卷积块x = self.conv2(x)x = self.bn2(x)x = self.relu2(x)x = self.pool2(x)x = self.cbam2(x) # 应用CBAM# 第三个卷积块x = self.conv3(x)x = self.bn3(x)x = self.relu3(x)x = self.pool3(x)x = self.cbam3(x) # 应用CBAM# 全连接层x = x.view(-1, 128 * 4 * 4)x = self.fc1(x)x = self.relu3(x)x = self.dropout(x)x = self.fc2(x)return x# 初始化模型并移至设备
model = CBAM_CNN().to(device)
criterion = nn.CrossEntropyLoss()
optimizer = optim.Adam(model.parameters(), lr=0.001)
scheduler = optim.lr_scheduler.ReduceLROnPlateau(optimizer, mode='min', patience=3, factor=0.5)# 创建TensorBoard的SummaryWriter,指定日志保存目录
log_dir = 'runs/cifar10_mlp_experiment'
# 如果目录已存在,添加后缀避免覆盖
if os.path.exists(log_dir):i = 1while os.path.exists(f"{log_dir}_{i}"):i += 1log_dir = f"{log_dir}_{i}"
writer = SummaryWriter(log_dir)# 训练函数
def train(model, train_loader, test_loader, criterion, optimizer, scheduler, device, epochs):model.train()all_iter_losses = []iter_indices = []train_acc_history = []test_acc_history = []train_loss_history = []test_loss_history = []# 记录训练开始时间,用于计算训练速度global_step = 0for epoch in range(epochs):running_loss = 0.0correct = 0total = 0for batch_idx, (data, target) in enumerate(train_loader):data, target = data.to(device), target.to(device)optimizer.zero_grad()output = model(data)loss = criterion(output, target)loss.backward()optimizer.step()iter_loss = loss.item()all_iter_losses.append(iter_loss)iter_indices.append(epoch * len(train_loader) + batch_idx + 1)running_loss += iter_loss_, predicted = output.max(1)total += target.size(0)correct += predicted.eq(target).sum().item()# 每100个批次记录一次信息到TensorBoardif (batch_idx + 1) % 100 == 0:batch_loss = loss.item()batch_acc = 100. * correct / total# 记录标量数据(损失、准确率)writer.add_scalar('Train/Batch_Loss', batch_loss, global_step)writer.add_scalar('Train/Batch_Accuracy', batch_acc, global_step)# 记录学习率writer.add_scalar('Train/Learning_Rate', optimizer.param_groups[0]['lr'], global_step)# 每500个批次记录一次直方图(权重和梯度)if (batch_idx + 1) % 500 == 0:for name, param in model.named_parameters():writer.add_histogram(f'weights/{name}', param, global_step)if param.grad is not None:writer.add_histogram(f'grads/{name}', param.grad, global_step)print(f'Epoch: {epoch+1}/{epochs} | Batch: {batch_idx+1}/{len(train_loader)} 'f'| 单Batch损失: {batch_loss:.4f} | 累计平均损失: {running_loss/(batch_idx+1):.4f}')global_step += 1epoch_train_loss = running_loss / len(train_loader)epoch_train_acc = 100. * correct / total# 记录每个epoch的训练损失和准确率writer.add_scalar('Train/Epoch_Loss', epoch_train_loss, epoch)writer.add_scalar('Train/Epoch_Accuracy', epoch_train_acc, epoch)train_acc_history.append(epoch_train_acc)train_loss_history.append(epoch_train_loss)# 测试阶段model.eval()test_loss = 0correct_test = 0total_test = 0# 用于存储预测错误的样本wrong_images = []wrong_labels = []wrong_preds = []with torch.no_grad():for data, target in test_loader:data, target = data.to(device), target.to(device)output = model(data)test_loss += criterion(output, target).item()_, predicted = output.max(1)total_test += target.size(0)correct_test += predicted.eq(target).sum().item()# 收集预测错误的样本wrong_mask = (predicted != target).cpu()if wrong_mask.sum() > 0:wrong_batch_images = data[wrong_mask].cpu()wrong_batch_labels = target[wrong_mask].cpu()wrong_batch_preds = predicted[wrong_mask].cpu()wrong_images.extend(wrong_batch_images)wrong_labels.extend(wrong_batch_labels)wrong_preds.extend(wrong_batch_preds)epoch_test_loss = test_loss / len(test_loader)epoch_test_acc = 100. * correct_test / total_test# 记录每个epoch的测试损失和准确率writer.add_scalar('Test/Loss', epoch_test_loss, epoch)writer.add_scalar('Test/Accuracy', epoch_test_acc, epoch)# 计算并记录训练速度(每秒处理的样本数)# 这里简化处理,假设每个epoch的时间相同samples_per_epoch = len(train_loader.dataset)# 实际应用中应该使用time.time()来计算真实时间test_acc_history.append(epoch_test_acc)test_loss_history.append(epoch_test_loss)scheduler.step(epoch_test_loss)print(f'Epoch {epoch+1}/{epochs} 完成 | 训练准确率: {epoch_train_acc:.2f}% | 测试准确率: {epoch_test_acc:.2f}%')# 可视化预测错误的样本(只在最后一个epoch进行)if epoch == epochs - 1 and len(wrong_images) > 0:# 最多显示8个错误样本display_count = min(8, len(wrong_images))wrong_img_grid = torchvision.utils.make_grid(wrong_images[:display_count])# 创建错误预测的标签文本wrong_text = []for i in range(display_count):true_label = classes[wrong_labels[i]]pred_label = classes[wrong_preds[i]]wrong_text.append(f'True: {true_label}, Pred: {pred_label}')writer.add_image('错误预测样本', wrong_img_grid)writer.add_text('错误预测标签', '\n'.join(wrong_text), epoch)# 关闭TensorBoard写入器writer.close()return epoch_test_acc# 执行训练
epochs = 1
print("开始使用带CBAM的CNN训练模型...")
print(f"TensorBoard日志保存在: {log_dir}")
print("训练完成后,使用命令 `tensorboard --logdir=runs` 启动TensorBoard查看可视化结果")
final_accuracy = train(model, train_loader, test_loader, criterion, optimizer, scheduler, device, epochs)
print(f"训练完成!最终测试准确率: {final_accuracy:.2f}%")# # 保存模型
# torch.save(model.state_dict(), 'cifar10_cbam_cnn_model.pth')
# print("模型已保存为: cifar10_cbam_cnn_model.pth")