【同轴线共焦传感器原理】
同轴线共焦传感器原理
- 1. 共焦光学系统的基本结构
- 2. 核心原理:光学层析与空间滤波
- (1)共焦光路形成
- (2)非焦面光信号抑制
- 3. 测量模式分类
- (1)位移测量模式(单点共焦)
- (2)光谱共焦(Chromatic Confocal)
- (3)线共焦(Line Confocal)
- 4. 关键公式与参数
- 5. 技术优势
- 6. 典型应用场景
- 7. 局限性及应对
- 总结
共焦传感器(Confocal Sensor)是一种基于光学共焦原理的高精度测量技术,其核心思想是通过空间滤波消除非焦面反射光干扰,从而实现对被测物体表面形貌或位移的纳米级分辨。以下是其工作原理的详细说明:
1. 共焦光学系统的基本结构
共焦传感器通常由以下关键组件构成:
- 点光源(激光或白光)
- 分光镜(Beam Splitter)
- 物镜(高NA透镜)
- 共焦小孔(Pinhole)
- 探测器(光电传感器或光谱仪)
2. 核心原理:光学层析与空间滤波
(1)共焦光路形成
- 光源发射:点光源发出的光经分光镜反射,通过物镜聚焦到被测物体表面。
- 焦点反射:只有位于焦平面(被测物表面)的光点会精确反射回光路。
- 信号接收:反射光再次通过物镜和分光镜,严格聚焦通过共焦小孔后被探测器接收。
(2)非焦面光信号抑制
- 焦平面外的散射光(如来自被测物内部或相邻区域的反射光)因无法通过小孔而被过滤,实现光学层析(Optical Sectioning)。
- 效果:系统仅接收焦平面处的信号,信噪比显著提升(对比传统显微镜提升50%以上)。
3. 测量模式分类
(1)位移测量模式(单点共焦)
- 轴向扫描:通过移动物镜或被测物,记录光强峰值对应的位置,计算位移(分辨率可达1nm)。
- 应用:薄膜厚度、微结构高度测量。
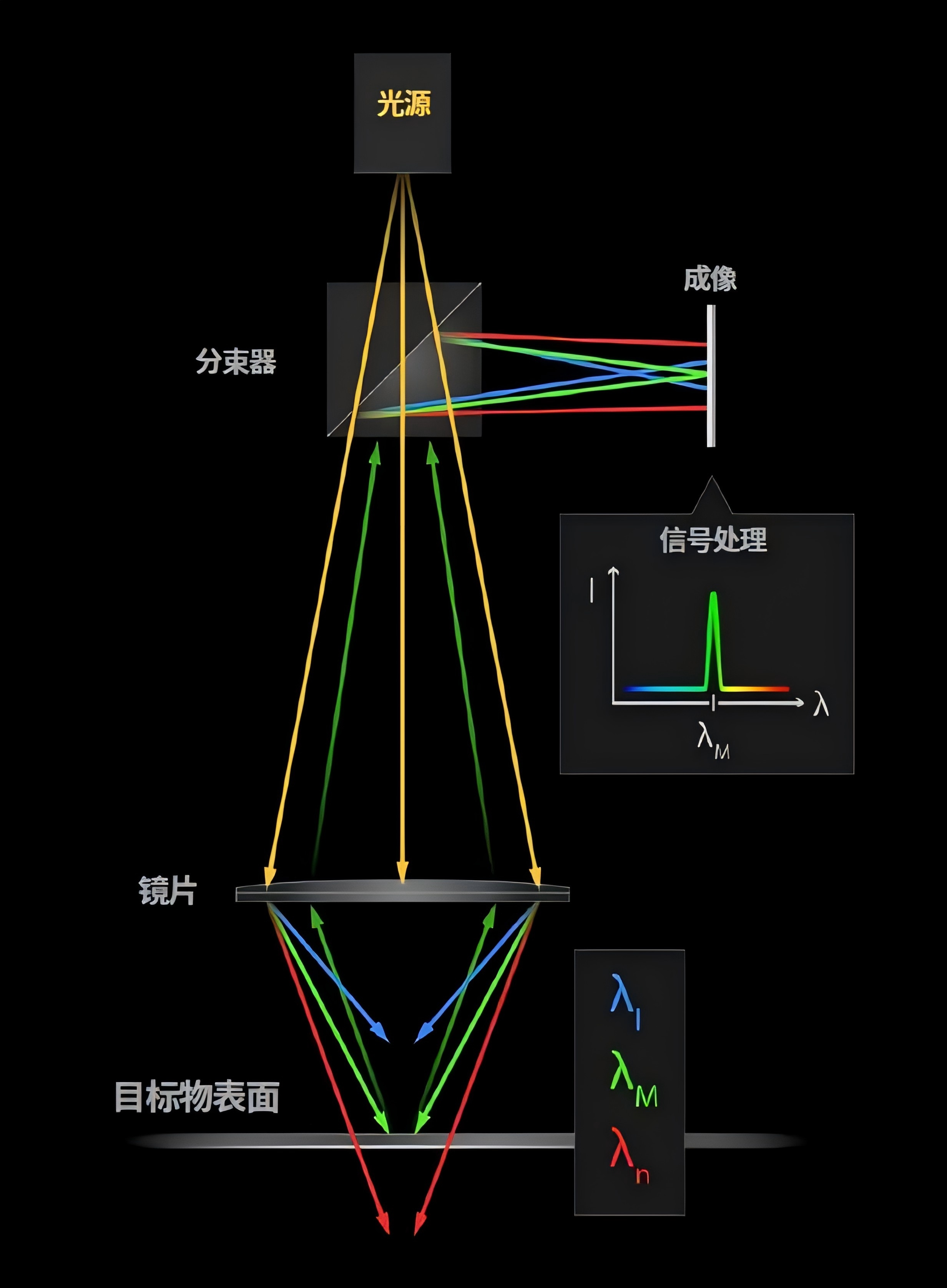
(2)光谱共焦(Chromatic Confocal)
- 色散透镜:白光通过轴向色差透镜,不同波长光聚焦在不同深度(如蓝光焦距短,红光焦距长)。
- 波长-位移映射:反射光的峰值波长对应被测物位置(无需机械扫描)。
- 优势:适合透明/多层材料检测(如玻璃波纹管)。
(3)线共焦(Line Confocal)
- 线光源替代点光源:通过柱面镜形成共焦线,配合扫描运动实现2.5D轮廓测量。
- 优势:高速检测(如生产线上的波纹管全长扫描)。
4. 关键公式与参数
-
轴向分辨率:
Δ z = λ 2 n ( 1 − cos α ) \Delta z = \frac{\lambda}{2n(1-\cos\alpha)} Δz=2n(1−cosα)λ
( λ λ λ:波长, n n n:折射率, α α α:物镜半孔径角)
-
横向分辨率:与传统显微镜相同,约0.61 λ / N A λ/NA λ/NA。
5. 技术优势
| 特性 | 共焦传感器 | 传统光学测量 |
|---|---|---|
| 分辨率 | 轴向1nm,横向0.1μm | 微米级 |
| 抗干扰能力 | 抑制离焦散射光 | 易受环境光/杂散光影响 |
| 适用材料 | 高反光/透明/多层材料 | 受限(如镜面反射失效) |
| 测量维度 | 3D形貌/厚度 | 多为2D图像 |
6. 典型应用场景
- 半导体制造:
- 晶圆表面缺陷检测(灵敏度0.01μm)。
- 精密加工:
- 波纹管焊接缝的3D形貌重建。
- 生物医学:
- 透明角膜厚度测量(光谱共焦)。
7. 局限性及应对
- 景深限制:共焦小孔导致景深较窄。
- 解决方案:自动对焦扫描或大NA物镜。
- 透明材料折射误差:
- 解决方案:折射率补偿算法或多波长测量。
总结
共焦传感器通过共焦小孔的空间滤波和光学层析技术,实现了远超传统光学方法的测量精度与抗干扰能力。选择时需根据被测物特性(如尺寸/材质)匹配传感器类型(点/线/光谱共焦)。