ROS:pcd点云转为路径规划的pgm文件和yaml文件
1、环境
ubuntu 20.04
ros-noetic2、编译安装pcd2pgm项目
项目源码也可以通过地址下载:https://download.csdn.net/download/weixin_42140236/90955150
mkdir -p pcd2pgm_ws/src
cd pcd2pgm_ws/src
git clone https://github.com/hujiax380/pcd2pgm.git3、根据自身情况,修改pcd2pgm/pcd2pgm/src/test.cpp 的pcd点云文件路径和名称,如下图:
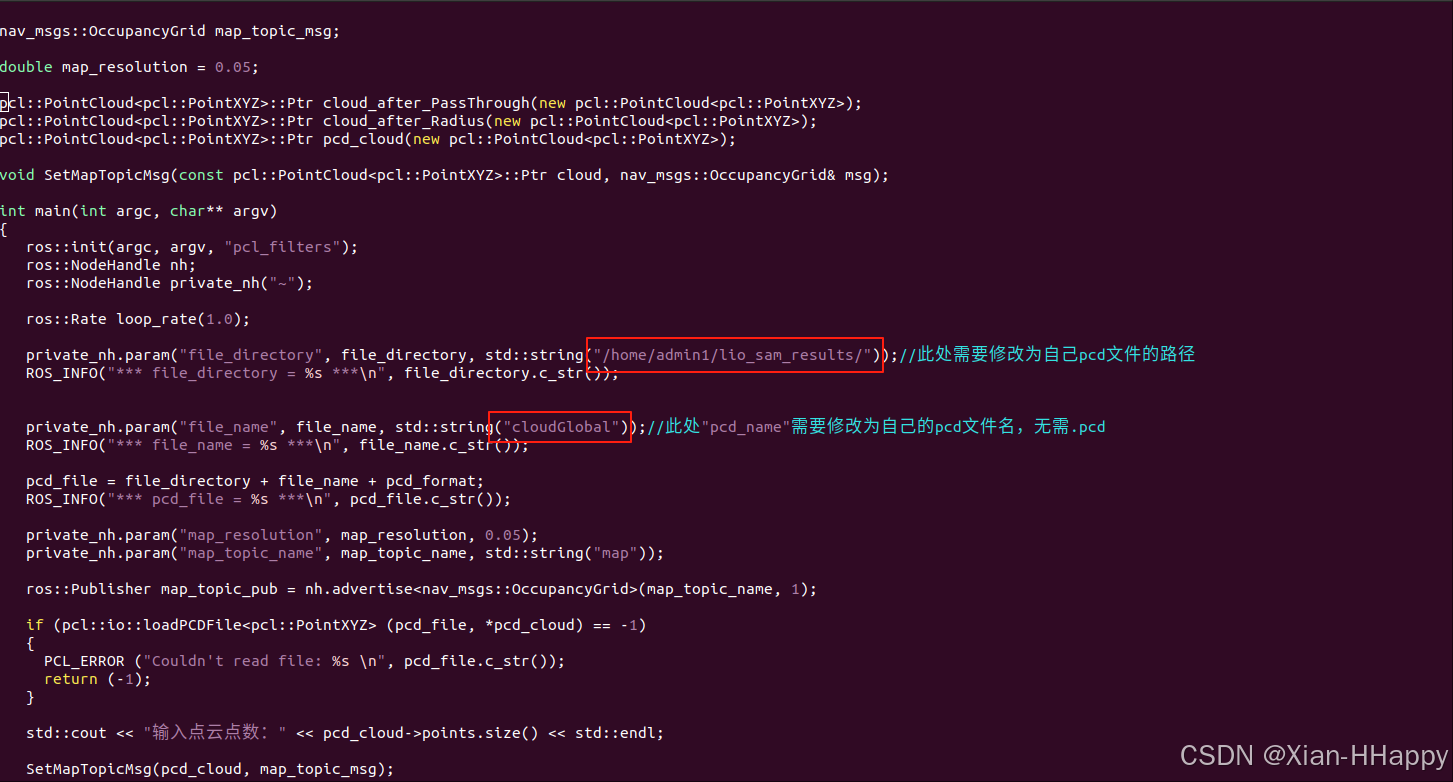
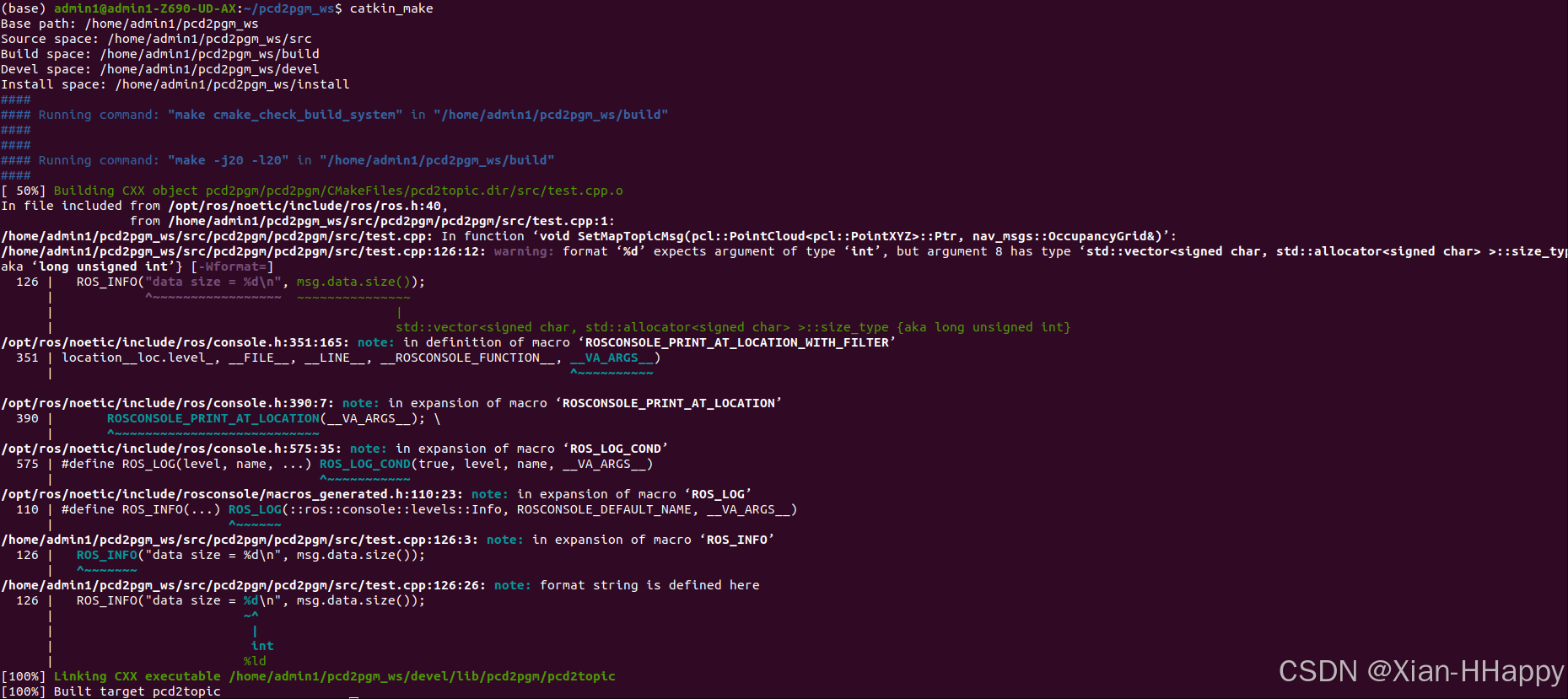
4、回到工作空间路径:pcd2pgm_ws,执行以下命令进行编译。
catkin_make编译成功log可能如下:
5、开始pcd转pgm
A) 打开新终端,启动 ros 环境
# 开启终端,启动ros
roscore图示如下:
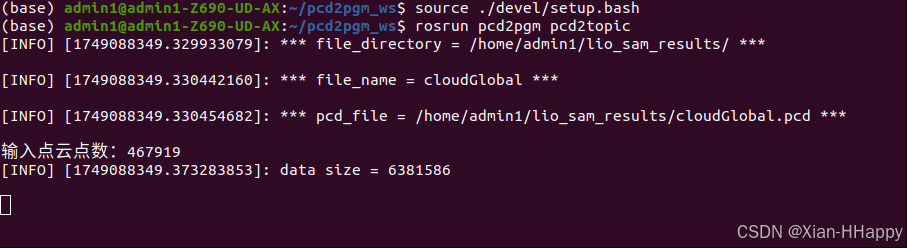
B) 打开新终端,安装&启动 pcd转pgm服务和topic
# 安装&启动 pcd转pgm服务和topic
source ./devel/setup.bash
rosrun pcd2pgm pcd2topic图示如下:
C)打开新终端,启动 map_saver
# 启动 map_saver
rosrun map_server map_saver
运行之后会生成:map.pgm 和 map.yaml文件。
map.yaml文件如下所示:
image: map.pgm
resolution: 0.050000
origin: [-51.844353, -37.823872, 0.000000]
negate: 0
occupied_thresh: 0.65
free_thresh: 0.196
map.pgm 图示如下:

6、rviz可视化pgm图
A) 打开新终端,启动 ros 环境
roscoreB)打开新终端,开启map_server服务
rosrun map_server map_server map.yaml图示如下:

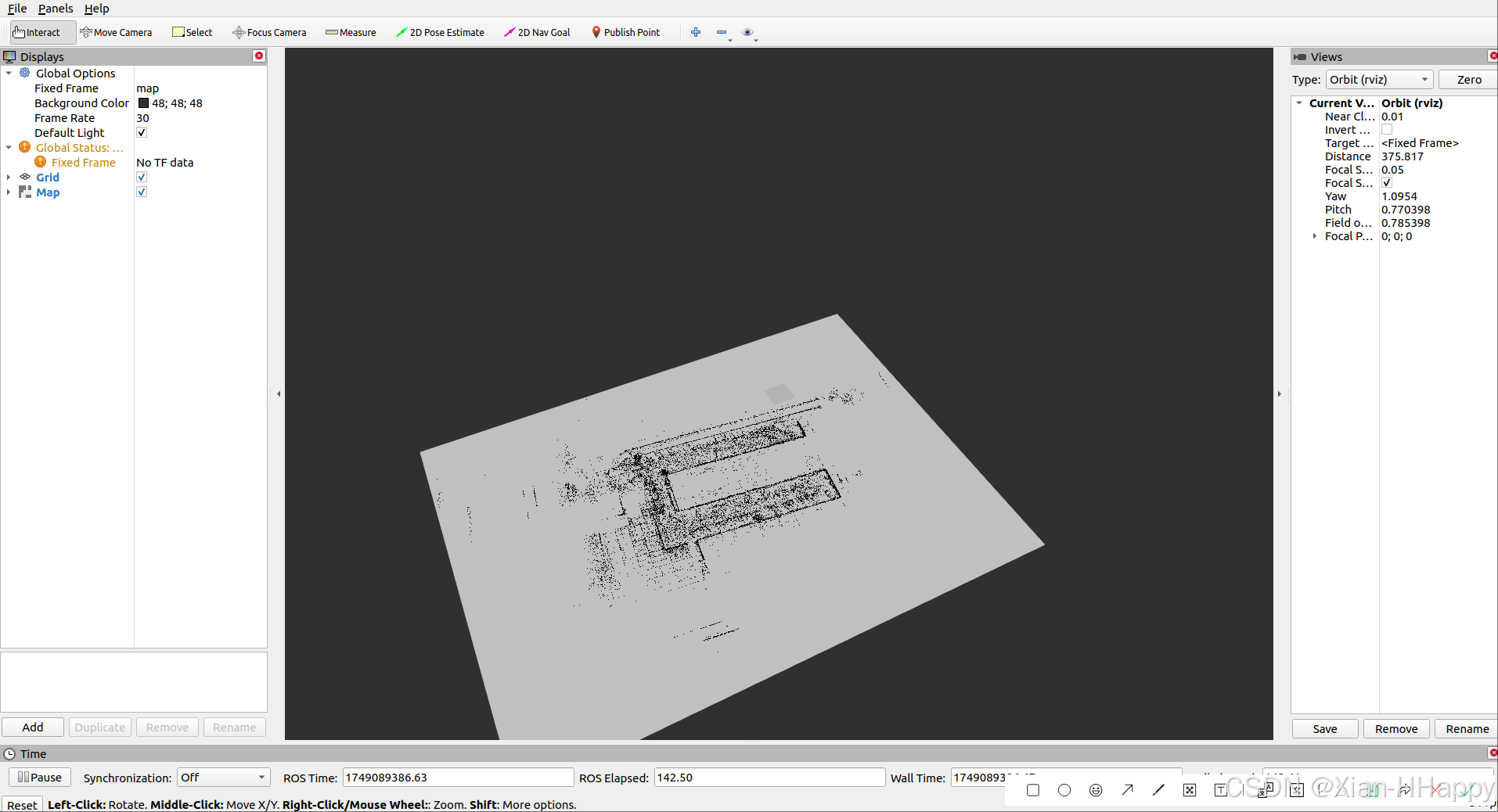
C) 打开新终端,rviz
图示如下:

D) rviz 添加 topic
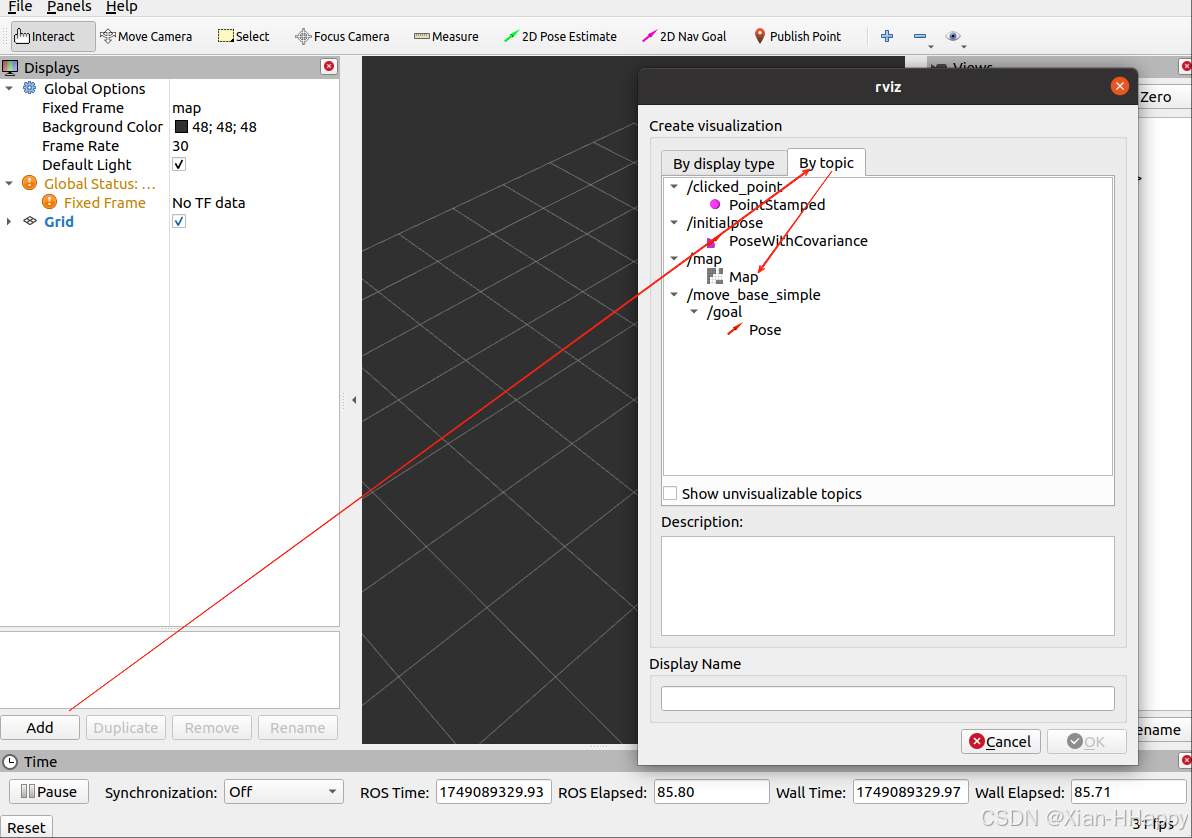
最终加载pgm图效果如下: