深蓝学院 机器人操作系统ROS理论与实践(三)
ROS基础
ROS是一种分布式的软件框架,节点之间通过松耦合的方式进行组合。
三、分布式通信
如何实现分布式多级通信?
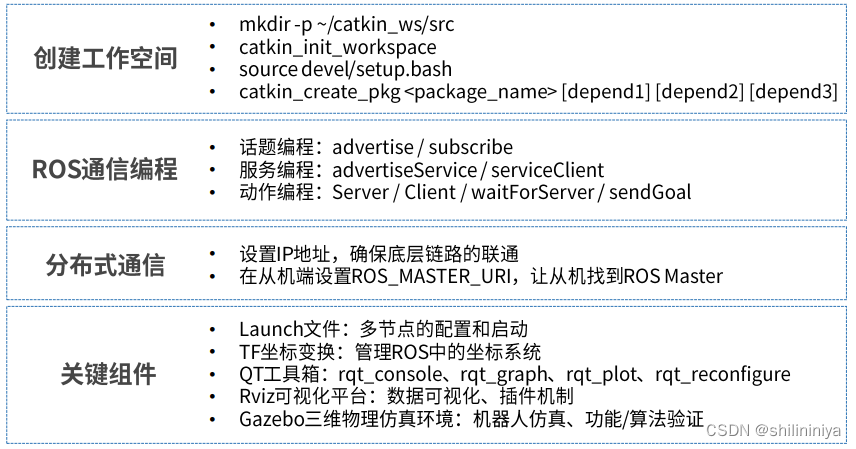
1、设置IP地址,确保底层链路的联通
ifconfig 查询ip地址
sudo vi /etc/hosts 使用该命令,将两台设备设置到对方的host文件里
ping 计算机名 ping一下网络,看是否能成功2、在从机端设置ROS_MASTER_URI(通过设置环境变量来设置),让从机找到ROS Master
vi .bashrc 进入bash文件进行配置在bash文件中加入 export ROS_MASTER_URI=http://hcx-pc:11311 (当前终端有效),11311为ROS Master的默认端口号
四、ROS中的关键组件
Launch文件
通过XML文件实现多节点的配置和启动(可自动启动ROS Master)
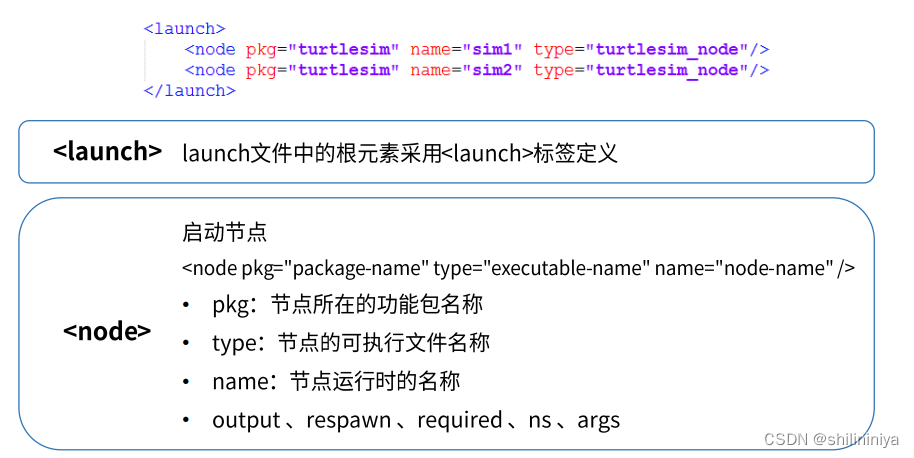
output—某些节点是否需要输出;respawn—当前命令失效的时候,会重新启动
required—必须的,没有启动成功laumch文件无法启动
ns—namespace,节点命名空间的属性;args—节点中有哪些输入参数
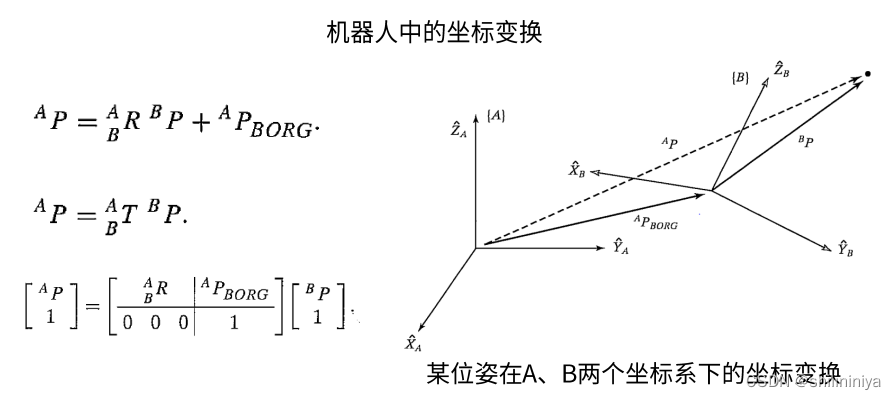
TF坐标变换
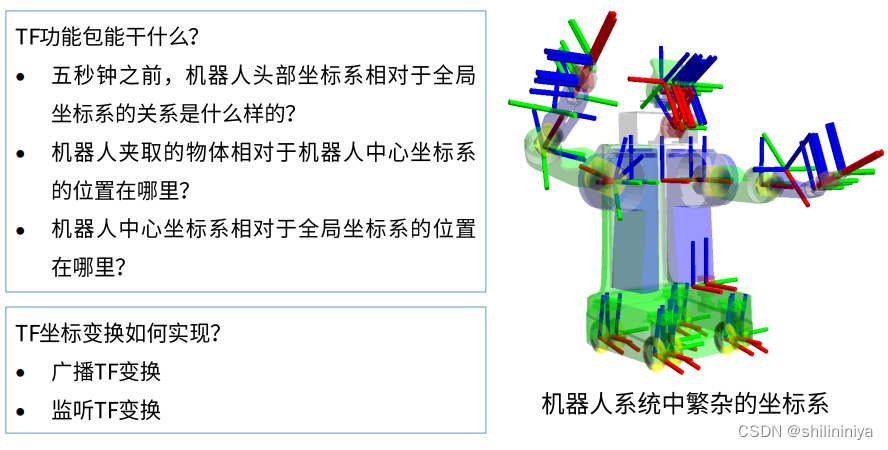
一般认为,10s以内所有的坐标变换关系都可以被保存
如何实现一个TF广播器
定义TF广播器(TransformBroadcaster)→创建坐标变换值→发布坐标变换(send Trans)
如何实现一个TF监听器
定义TF监听器(TransformListener)→查找坐标变换(waitForTransform、lookupTransform)
如何编译代码
设置需要编译的代码和生成的可执行文件→设置链接库
在编译过程中,一直出现tf库未链接到程序中,解决方法:
sudo apt-get install ros-YOUR_ROS_DISTRO-tf2-ros 安装tf2库 然后一直出现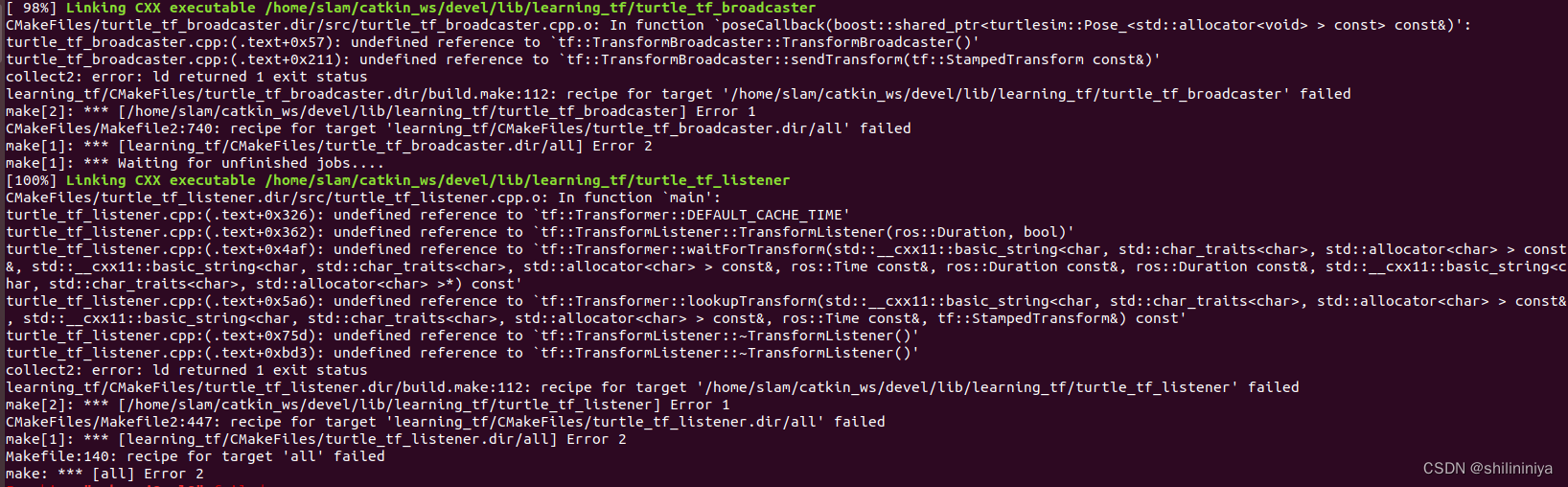
解决方法:除了加上
add_executable(turtle_tf_broadcaster src/turtle_tf_broadcaster.cpp)
target_link_libraries(turtle_tf_broadcaster ${catkin_LIBRARIES})add_executable(turtle_tf_listener src/turtle_tf_listener.cpp)
target_link_libraries(turtle_tf_listener ${catkin_LIBRARIES})在 CMakeLists.txt 文件中。还需要另外添加以下内容:
find_package(catkin REQUIRED COMPONENTS roscpp tf)
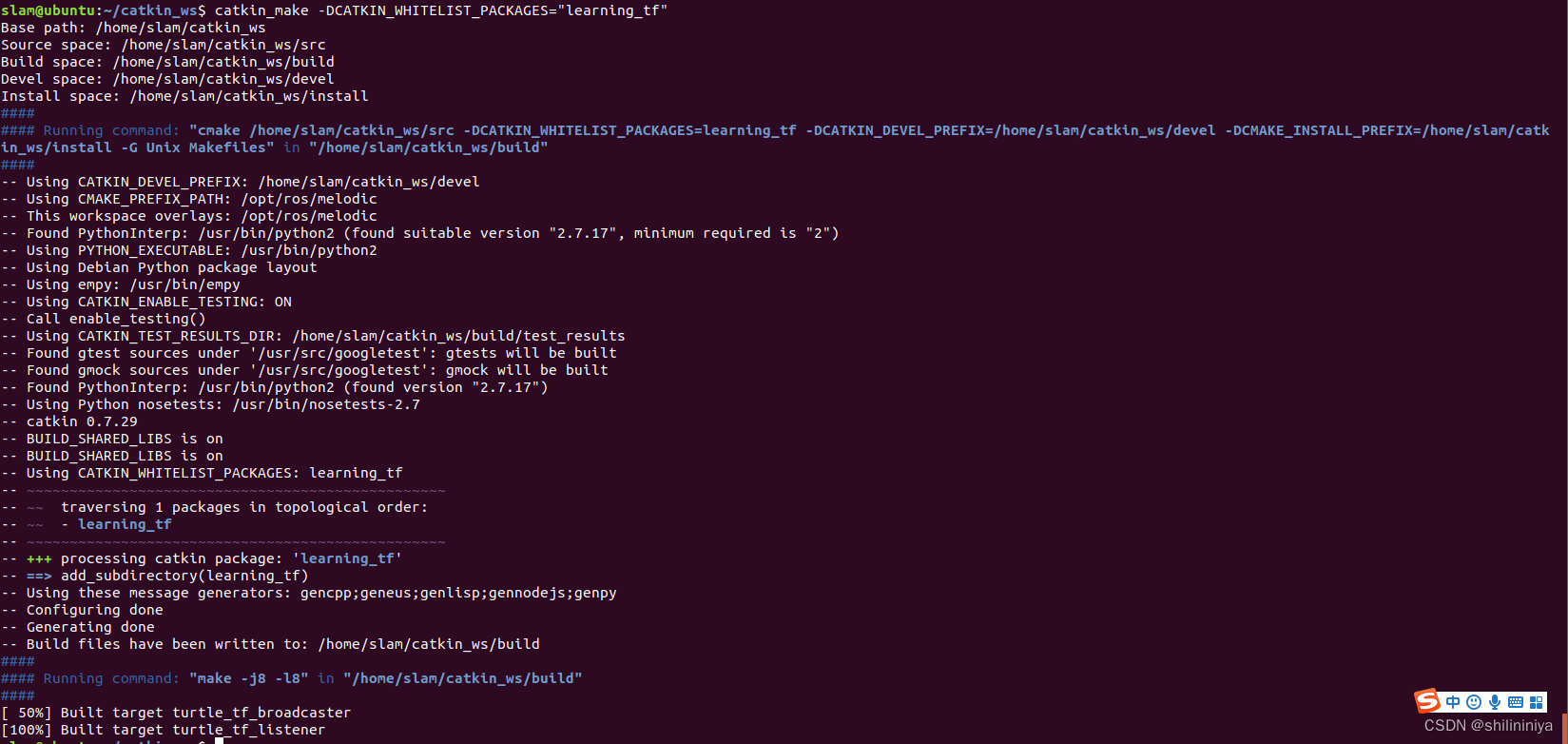
至此,我使用了编译指定功能包的命令编译learning_tf功能包
catkin_make -DCATKIN_WHITELIST_PACKAGES="learning_tf"使用此命令后记得使用catkin_make -DCATKIN_WHITELIST_PACKAGES=""编译所有功能包还原一下 ,不然下次编译其他功能包无法读取
编译成功!
 新建launch文件夹,写入launch文件使用roslaunch命令启动这个例程
新建launch文件夹,写入launch文件使用roslaunch命令启动这个例程
source ~/catkin_ws/devel/setup.bash
roslaunch learning_tf start_demo_with_listener.launch
roslaunch可以在任何文件夹下启动,但在启动前要配置环境变量
Qt工具箱
日志输出工具——rqt_console
计算图可视化工具——rqt_graph
数据绘图工具——rqt_plot
参数动态配置工具——rqt_reconfigure
Rviz可视化平台
一款三维可视化工具,可以很好的兼容基于ROS软件框架的机器人平台。
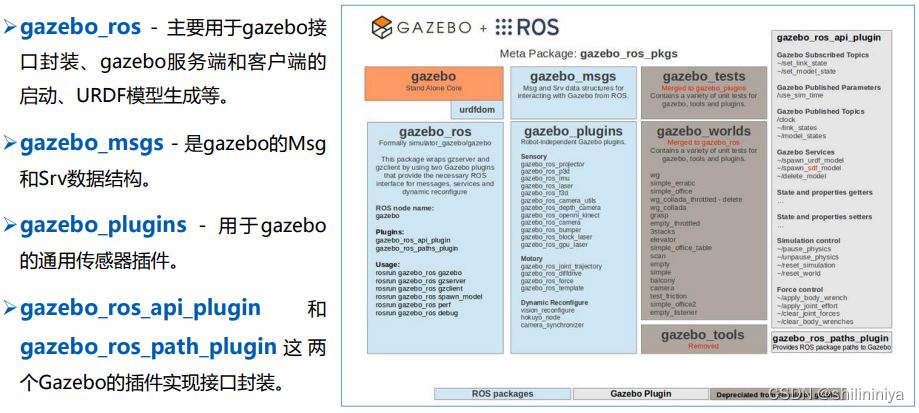
Gazebo物理仿真环境
一款功能强大的三维物理仿真平台
具有强大的物理引擎;高质量的图形渲染;方便的编程与图形接口;开源免费的优点
打开一个空环境
roslaunch gazebo_ros empty_world.launch 出现错误
解决方法:进入.ignition/fuel/config.yaml文件
sudo gedit ~/.ignition/fuel/config.yaml将注释掉url: https://api.ignitionfuel.org,加上为url: https://api.ignitionrobotics.org
此时出现[Err] [ClientConfig.cc:270] Parser error [4]
[Err] [ClientConfig.cc:270] Parser error [4]
解决方法:将url和name对齐,问题解决

使用gazebo进行仿真:创建仿真环境→配置机器人模型→开始仿真
总结: