【MATLAB例程】声纳信号处理与目标测距的程序|信号频率、信噪比、采样率和声速均可自行调整|附代码下载链接
本文介绍一个简单的声纳信号处理与目标测距 M A T L A B MATLAB MATLAB仿真。主要内容包括线性调频信号的生成、回波信号模拟、噪声加入、自相关处理以及目标检测。通过模拟水中目标的回波信号,计算出目标距离并对结果进行可视化。
文章目录
- 介绍
- 相关公式
- 信号延迟
- 距离公式
- 线性调频(LFM)信号公式
- 信噪比(SNR)公式
- 自相关公式
- 峰值与延迟时间公式
- 代码结构的说明
- 运行结果
- MATLAB源代码
介绍
相关公式
信号延迟
目标回波信号的往返延迟时间:
delay = 2 ⋅ distance c \text{delay} = \frac{2 \cdot \text{distance}}{c} delay=c2⋅distance
- delay: 回波信号的往返延迟时间(秒)。
- distance: 声波传播的目标距离(米)。
- c: 声波在介质中的传播速度(水中声速约为 1500 m/s)。
距离公式
根据检测到的延迟时间计算目标距离:
distance = detected_delay ⋅ c 2 \text{distance} = \frac{\text{detected\_delay} \cdot c}{2} distance=2detected_delay⋅c
- detected_delay: 检测到的延迟时间(秒)。
- c: 声波传播速度(米/秒)。
- 除以 2 是因为声波往返传播,计算距离只需单程时间。
线性调频(LFM)信号公式
线性调频信号的数学表达式为:
s ( t ) = cos ( 2 π ( f 0 t + K 2 t 2 ) ) s(t) = \cos\left(2\pi \left(f_0 t + \frac{K}{2}t^2\right)\right) s(t)=cos(2π(f0t+2Kt2))
其中:
- s ( t ) s(t) s(t): 在时间 t t t上的线性调频信号。
- f 0 f_0 f0: 起始频率(Hz)。
- K = f 1 − f 0 T K = \frac{f_1 - f_0}{T} K=Tf1−f0: 调频率,表示频率随时间的变化速率。
- f 1 f_1 f1: 终止频率(Hz)。
- T T T: 信号持续时间(秒)。
信噪比(SNR)公式
加入噪声时的信噪比公式为:
SNR(dB) = 10 ⋅ log 10 ( 信号功率 噪声功率 ) \text{SNR(dB)} = 10 \cdot \log_{10}\left(\frac{\text{信号功率}}{\text{噪声功率}}\right) SNR(dB)=10⋅log10(噪声功率信号功率)
- 信号功率: 发射信号的功率。
- 噪声功率: 加入的高斯白噪声的功率。
- 在代码中通过
awgn函数实现。
自相关公式
自相关用于检测接收信号与发射信号的相似性,其离散形式为:
R [ n ] = ∑ k = 0 N − 1 x [ k ] ⋅ h [ k + n ] R[n] = \sum_{k=0}^{N-1} x[k] \cdot h[k+n] R[n]=k=0∑N−1x[k]⋅h[k+n]
- R [ n ] R[n] R[n]: 自相关结果。
- x [ k ] x[k] x[k]: 接收信号。
- h [ k + n ] h[k+n] h[k+n]: 发射信号的倒置版本。
- N N N: 信号的长度。
在代码中,自相关通过匹配滤波的方式实现,即:
R = conv ( fliplr ( h ) , x , ’same’ ) R = \text{conv}(\text{fliplr}(h), x, \text{'same'}) R=conv(fliplr(h),x,’same’)
峰值与延迟时间公式
通过自相关结果找到峰值及其索引,计算检测到的延迟时间:
detected_delay = peak_index f s − T \text{detected\_delay} = \frac{\text{peak\_index}}{f_s} - T detected_delay=fspeak_index−T
- peak_index: 自相关结果中峰值的位置(采样点数)。
- f s f_s fs: 采样率(Hz)。
- T: 信号的持续时间(秒),用于调整延迟。
代码结构的说明
-
发射信号 (LFM):
- 生成了一段线性调频信号,频率从
f0到f1线性变化,并对信号加窗。 - 可通过图形窗口中的第一个子图观察信号波形。
- 生成了一段线性调频信号,频率从
-
接收信号 (含噪声):
- 模拟了信号到达目标后返回的回波,并加入了信噪比为
10 dB的高斯白噪声。 - 可通过图形窗口中的第二个子图观察接收信号波形。
- 模拟了信号到达目标后返回的回波,并加入了信噪比为
-
自相关输出:
- 对接收信号进行自相关处理,检测目标回波信号的峰值。
- 图形窗口中的第三个子图展示了自相关输出的绝对值。
-
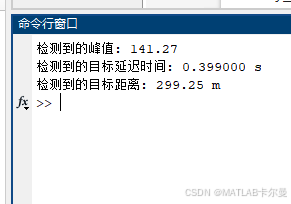
目标检测:
- 通过自相关计算出的峰值位置,得到检测到的目标距离,并打印结果。
运行结果
相关绘图:
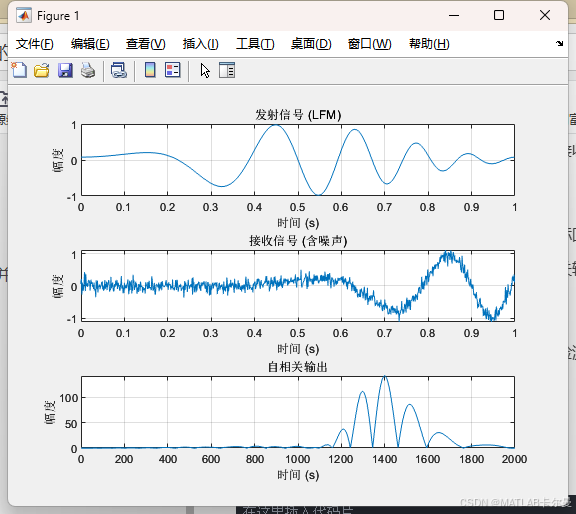
目标的实际距离为300米时,运行结果如下:
MATLAB源代码
% 声纳信号处理与测距
clear; clc; close all; % 清除工作区变量、命令行窗口和所有图形窗口
rng(0); % 设置随机数种子,保证结果可重复%% 参数设置
fs = 1e3; % 采样率 (Hz)
T = 1; % 信号持续时间 (s)
f0 = 1000; % 起始频率 (Hz)
f1 = 1010; % 终止频率 (Hz)
c = 1500; % 声速 (m/s),水中声速(常设为1500 m/s)
distance = 300; % 目标距离 (m)
SNR = 10; % 信噪比 (dB)%% 生成线性调频信号 (LFM)
t = 0:1/fs:T-1/fs; % 时间向量,长度为信号持续时间
tx_signal = chirp(t, f0, T, f1, 'linear'); % 生成线性调频信号
tx_signal = tx_signal .* hamming(length(tx_signal))'; % 对信号加Hamming窗以减少频谱泄漏% 绘制发射信号波形
figure; % 创建新图形窗口
subplot(3, 1, 1); % 将图分为3行1列,选择第1个子图
plot(t, tx_signal); % 绘制线性调频信号
title('发射信号 (LFM)'); % 标题
xlabel('时间 (s)'); % 横坐标标签
ylabel('幅度'); % 纵坐标标签
grid on; % 添加网格线%% 模拟回波信号
完整代码下载链接:https://download.csdn.net/download/callmeup/90892783
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者