1.3 线性系统的时域分析法
引言
本文深度解析《自动控制原理》第三章核心知识点,系统梳理动态性能分析、稳定性判据、稳态误差计算三大模块,结合关键公式推导与典型例题分析框架,助力快速掌握时域分析法核心内容。
考点一:动态性能分析
1. 一阶系统时域分析
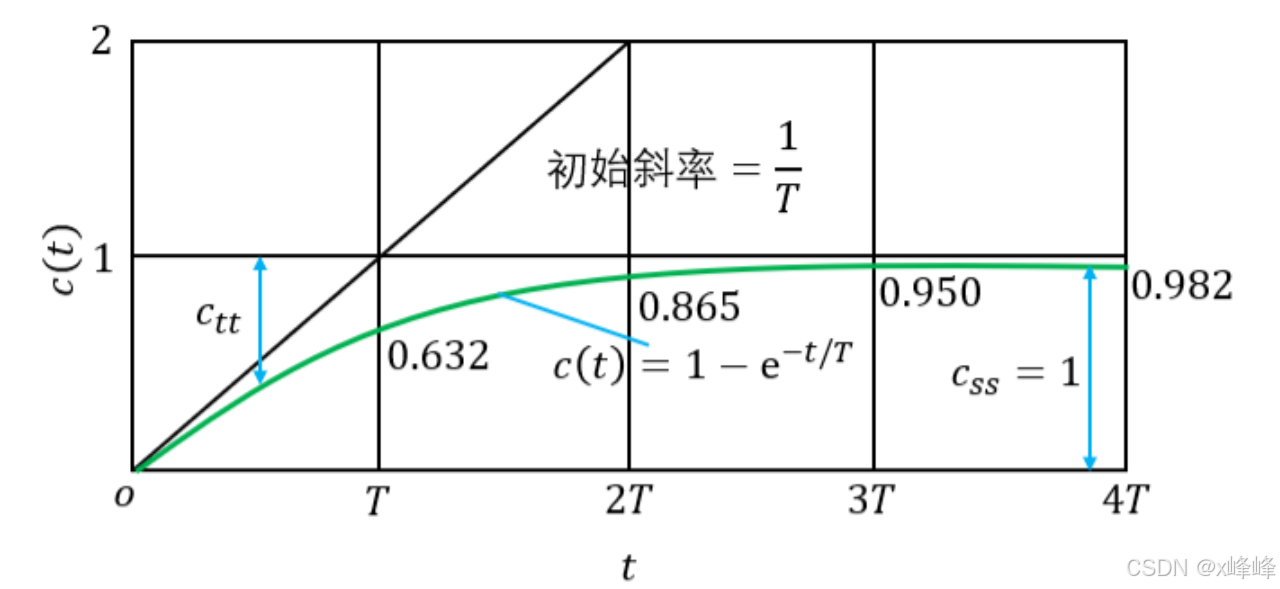
单位阶跃响应
- 传递函数:
Φ ( s ) = 1 T s + 1 \Phi(s) = \frac{1}{Ts + 1} Φ(s)=Ts+11 - 阶跃响应表达式(输入 R ( s ) = 1 s R(s) = \frac{1}{s} R(s)=s1时):
c ( t ) = 1 − e − t / T c(t) = 1 - e^{-t/T} c(t)=1−e−t/T - 调节时间:
t s = 3 T ( 5 % 误差带 ) , t s = 4 T ( 2 % 误差带 ) t_s = 3T \quad (5\%\text{误差带}), \quad t_s = 4T \quad (2\%\text{误差带}) ts=3T(5%误差带),ts=4T(2%误差带) - 响应曲线特性:
在 t = T t = T t=T时,响应值达到稳态值的63.2%;无超调,单调上升。
2. 二阶系统时域分析
2.1 标准传递函数
Φ ( s ) = ω n 2 s 2 + 2 ζ ω n s + ω n 2 \Phi(s) = \frac{\omega_n^2}{s^2 + 2\zeta\omega_n s + \omega_n^2} Φ(s)=s2+2ζωns+ωn2ωn2
- 参数定义:
- ζ \zeta ζ:阻尼比
- ω n \omega_n ωn:无阻尼自然振荡频率
- ω d = ω n 1 − ζ 2 \omega_d = \omega_n \sqrt{1-\zeta^2} ωd=ωn1−ζ2:阻尼振荡频率
2.2 阻尼比 ζ \zeta ζ对响应的影响
| 阻尼类型 | 根分布 | 响应特性 |
|---|---|---|
| 欠阻尼( 0 < ζ < 1 0<\zeta<1 0<ζ<1) | 共轭复根(实部负) | 衰减振荡,超调存在 |
| 临界阻尼( ζ = 1 \zeta=1 ζ=1) | 重根(负实轴) | 最快无超调响应 |
| 过阻尼( ζ > 1 \zeta>1 ζ>1) | 两不等负实根 | 响应缓慢无振荡 |
| 无阻尼( ζ = 0 \zeta=0 ζ=0) | 纯虚根 | 等幅振荡(临界稳定) |
2.3 欠阻尼阶跃响应( 0 < ζ < 1 0 < \zeta < 1 0<ζ<1)
c ( t ) = 1 − e − ζ ω n t 1 − ζ 2 sin ( ω d t + φ ) , φ = arctan ( 1 − ζ 2 ζ ) c(t) = 1 - \frac{e^{-\zeta\omega_n t}}{\sqrt{1-\zeta^2}} \sin\left(\omega_d t + \varphi\right), \quad \varphi = \arctan\left(\frac{\sqrt{1-\zeta^2}}{\zeta}\right) c(t)=1−1−ζ2e−ζωntsin(ωdt+φ),φ=arctan(ζ1−ζ2)
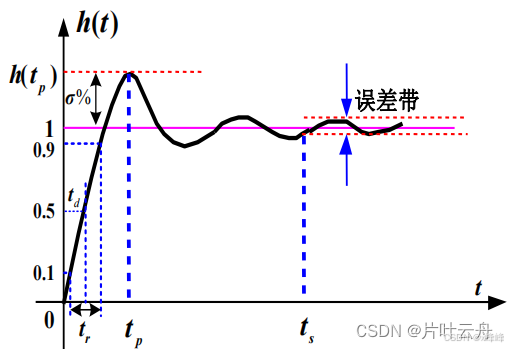
动态性能指标
上升时间 t r = π − β ω d , β = arccos ζ 峰值时间 t p = π ω d 超调量 σ % = e − ζ π 1 − ζ 2 × 100 % 调节时间 t s ≈ 3 ζ ω n ( 5 % 准则 ) \begin{aligned} \text{上升时间} \quad & t_r = \frac{\pi - \beta}{\omega_d}, \quad \beta = \arccos\zeta \\ \text{峰值时间} \quad & t_p = \frac{\pi}{\omega_d} \\ \text{超调量} \quad & \sigma\% = e^{-\frac{\zeta\pi}{\sqrt{1-\zeta^2}}} \times 100\% \\ \text{调节时间} \quad & t_s \approx \frac{3}{\zeta\omega_n} \quad (5\%准则) \end{aligned} 上升时间峰值时间超调量调节时间tr=ωdπ−β,β=arccosζtp=ωdπσ%=e−1−ζ2ζπ×100%ts≈ζωn3(5%准则)
其中 ω d = ω n 1 − ζ 2 \omega_d = \omega_n\sqrt{1-\zeta^2} ωd=ωn1−ζ2 为阻尼振荡频率。
3. 高阶系统时域分析
- 传递函数分解:
高阶系统可分解为一阶惯性环节和二阶振荡环节的叠加:
Φ ( s ) = ∑ j = 1 q A j s + p j + ∑ k = 1 r B k s + C k s 2 + 2 ζ k ω n k s + ω n k 2 \Phi(s) = \sum_{j=1}^q \frac{A_j}{s + p_j} + \sum_{k=1}^r \frac{B_k s + C_k}{s^2 + 2\zeta_k\omega_{nk}s + \omega_{nk}^2} Φ(s)=j=1∑qs+pjAj+k=1∑rs2+2ζkωnks+ωnk2Bks+Ck - 主导极点原则:
- 距虚轴距离最近且附近无闭环零点的极点主导系统动态特性;
- 其他极点实部绝对值需大于主导极点实部的5倍以上。
- 偶极子:
- 闭环零点与闭环极点非常接近,构成一对偶极子;偶极子可以近似对消。
考点二:稳定性分析——劳斯判据(Routh Rules)
1. 系统稳定的充要条件
闭环系统特征根全部位于s左半平面;若存在虚轴根,则系统临界稳定。
2. 劳斯判据应用步骤
-
列写特征方程:
D ( s ) = a n s n + a n − 1 s n − 1 + ⋯ + a 1 s + a 0 = 0 D(s) = a_n s^n + a_{n-1} s^{n-1} + \cdots + a_1 s + a_0 = 0 D(s)=ansn+an−1sn−1+⋯+a1s+a0=0 -
构造劳斯表:
s n a n a n − 2 a n − 4 ⋯ s n − 1 a n − 1 a n − 3 a n − 5 ⋯ s n − 2 b 1 b 2 b 3 ⋯ ⋮ ⋮ ⋮ ⋮ s 0 h 1 \begin{array}{c|cccc} s^n & a_n & a_{n-2} & a_{n-4} & \cdots \\ s^{n-1} & a_{n-1} & a_{n-3} & a_{n-5} & \cdots \\ s^{n-2} & b_1 & b_2 & b_3 & \cdots \\ \vdots & \vdots & \vdots & \vdots & \\ s^0 & h_1 \end{array} snsn−1sn−2⋮s0anan−1b1⋮h1an−2an−3b2⋮an−4an−5b3⋮⋯⋯⋯
其中:
b 1 = a n − 1 a n − 2 − a n a n − 3 a n − 1 , b 2 = a n − 1 a n − 4 − a n a n − 5 a n − 1 , ⋯ b_1 = \frac{a_{n-1}a_{n-2} - a_n a_{n-3}}{a_{n-1}}, \quad b_2 = \frac{a_{n-1}a_{n-4} - a_n a_{n-5}}{a_{n-1}}, \cdots b1=an−1an−1an−2−anan−3,b2=an−1an−1an−4−anan−5,⋯ -
稳定性判定:
- 劳斯表第一列元素全为正 → 系统稳定;
- 第一列元素符号变化次数 = 右半平面极点个数。
3. 特殊情况处理
| 场景 | 处理方法 |
|---|---|
| 某行首元素为零 | 用极小量 ε \varepsilon ε代替零,分析 ε → 0 + \varepsilon \to 0^+ ε→0+时的符号变化 |
| 某行全为零 | 用上一行构造辅助多项式 A ( s ) A(s) A(s),求导后继续填表 |
考点三:稳态误差分析
1. 误差定义
| 定义方式 | 公式 | 物理意义 |
|---|---|---|
| 输入端误差 | E ( s ) = R ( s ) − H ( s ) C ( s ) E(s) = R(s) - H(s)C(s) E(s)=R(s)−H(s)C(s) | 输入信号与反馈信号的差值 |
| 输出端误差 | E ′ ( s ) = R ′ ( s ) − C ( s ) E'(s) = R'(s) - C(s) E′(s)=R′(s)−C(s) | 期望输出与实际输出的差值 |
2. 静态误差系数法
| 系统类型 | 位置误差系数 K p K_p Kp | 速度误差系数 K v K_v Kv | 加速度误差系数 K a K_a Ka |
|---|---|---|---|
| 0型系统 | K p = K K_p = K Kp=K | K v = 0 K_v = 0 Kv=0 | K a = 0 K_a = 0 Ka=0 |
| I型系统 | K p = ∞ K_p = \infty Kp=∞ | K v = K K_v = K Kv=K | K a = 0 K_a = 0 Ka=0 |
| II型系统 | K p = ∞ K_p = \infty Kp=∞ | K v = ∞ K_v = \infty Kv=∞ | K a = K K_a = K Ka=K |
稳态误差公式
e s s = 1 1 + K p r 0 + 1 K v v 0 + 1 K a a 0 e_{ss} = \frac{1}{1+K_p} r_0 + \frac{1}{K_v} v_0 + \frac{1}{K_a} a_0 ess=1+Kp1r0+Kv1v0+Ka1a0
- r 0 r_0 r0:阶跃输入幅值
- v 0 v_0 v0:斜坡输入斜率
- a 0 a_0 a0:抛物线输入加速度
3. 扰动作用下的稳态误差
- 扰动传递函数: E n ( s ) N ( s ) = − G 2 ( s ) 1 + G 1 ( s ) G 2 ( s ) H ( s ) \frac{E_n(s)}{N(s)} = -\frac{G_2(s)}{1 + G_1(s)G_2(s)H(s)} N(s)En(s)=−1+G1(s)G2(s)H(s)G2(s)
- 总稳态误差: e s s = e s s r + e s s n e_{ss} = e_{ssr} + e_{ssn} ess=essr+essn
总结与备考建议
- 动态性能:重点掌握一阶、二阶系统响应曲线特性,熟练运用动态指标公式;
- 稳定性分析:通过劳斯判据快速判断系统稳定性,注意特殊情况的处理技巧;
- 稳态误差:区分不同系统类型对误差的影响,掌握复合输入下的误差叠加原理;
- 高阶系统:理解主导极点概念,掌握部分分式分解方法。