操作系统理解(xv6)
xv6操作系统项目复习笔记
宗旨:只记大框架,不记细节,没有那么多的时间
一、xv6的页表是如何搭建的?
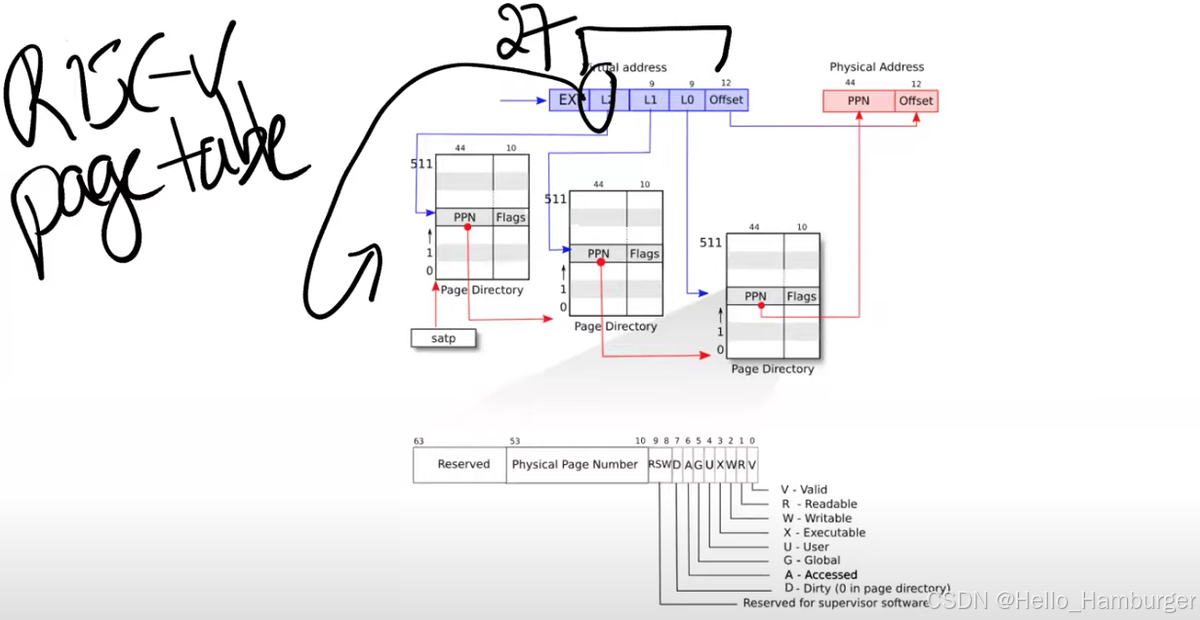
xv6这个项目中,虚拟地址用了39位(27位+12位(物理内存page偏移地址)),物理地址用了56位(44位(物理内存page首地址)+12位(物理内存page偏移地址)).
- 特别的,xv6中页表的实现是多级页表的形式,一个虚拟地址翻译为物理地址,需要内存管理单元(MMU)访问三次内存(每次访问一个page从对应位置获取下一个待访问page的地址)(页表缓存TLB会将虚拟地址到物理地址的映射记录到缓存中提升效率(处理器内部机制)),其中虚拟地址的27位(拆分成3个9位,分别指定MMU去page的哪个位置寻找下一个待访问page的地址)。
- 如果将2 ^ 39的虚拟地址全部映射到物理地址,页表的大小为1+512+512*512 = (1 + 2 ^ 9 +2^18)个page,相比直接一级映射节省空间,同时在实际应用中页表是按需构建,即哪些虚拟地址需要映射,才会增加变动页表大小。
二、内核页表
内核页表PHYSTOP以下虚拟地址和物理地址是一一对应的,顶端的Trampoline以及每个进程的内核栈(kalloc)不是一一对应的。
boot ROM:当你对主板上电,主板做的第一件事情就是运行存储在boot ROM中的代码,当boot完成之后,会跳转到地址0x80000000,操作系统需要确保那个地址有一些数据能够接着启动操作系统.
物理内存大小(RAM):0x80000000到0x86400000,这个地址范围是100M,不过内核代码中PHYSTOP为0x80000000+12810241024,这个是有128M.(底下的图片是真实开发版的数据,而代码中的地址是qemu软件模拟的地址)
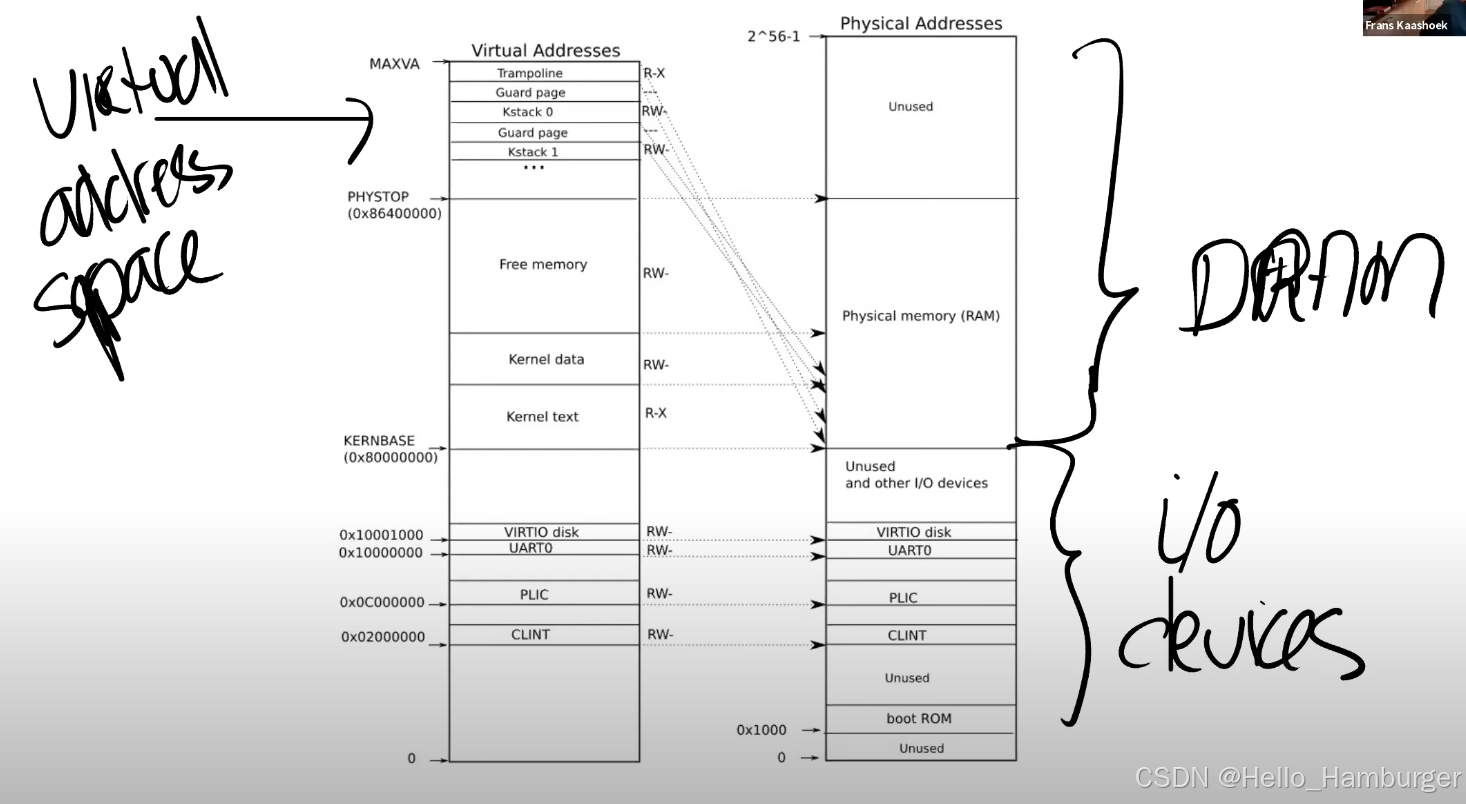
其中Kernel text和Kernel data先是直接映射到物理内存,另外其中的Trampoline以及进程的内核栈在虚拟地址顶部再重新映射了一次。(即两个虚拟地址映射到同一个物理地址,程序实际运行只用了顶部的虚拟地址)。(问题:kernel text和Kernel data中为什么有Trampoline和进程内核栈?)
答:Trampoline跳转页面是一段特定的汇编代码,保存在Kernel text部分(RX可读可执行)。进程的内核栈是通过kalloc从RAM中申请的1个page.内核页表中虚拟地址从KERNBASE到PHYSTOP之间全部都是直接映射,进程的内核栈申请到的地址也在这个区间里,内核是可以通过申请到的这个地址直接使用进程的内核栈的。(重新映射的原因:高效的上下文切换;内存保护;确保栈空间的独立性;理解起来麻烦,先不管)
三、进程地址空间和页表
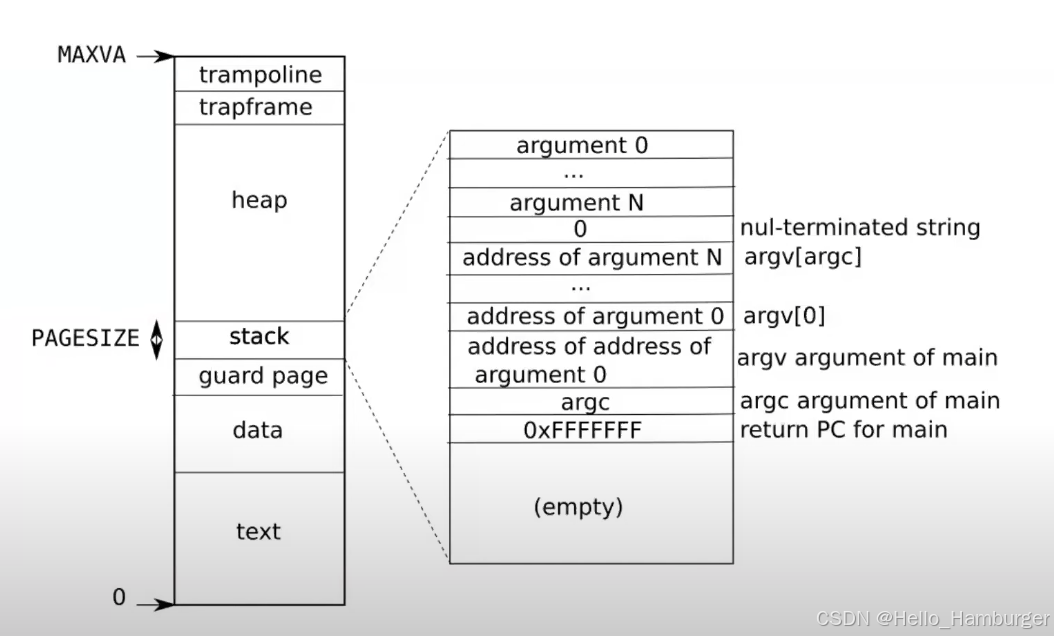
从图中可以看到argument0-N代表的是argv中的每个参数字符串。address of argument N-0对应的是argv中的每个字符串在stack中的地址,argc为参数个数,return PC for main指明程序返回地址。
RISC-V和x86的区别
x86:复杂指令集(闭源)
RISC-V:精简指令集(开源)
ARM:精简指令集
简单来说:不同指令集有不同的汇编语言,不同处理器与不同的指令集配对,可以处理对应的汇编语言。x86处理器可以处理复杂指令汇编语言,RISC-V处理器可以处理RISC-V的汇编语言。
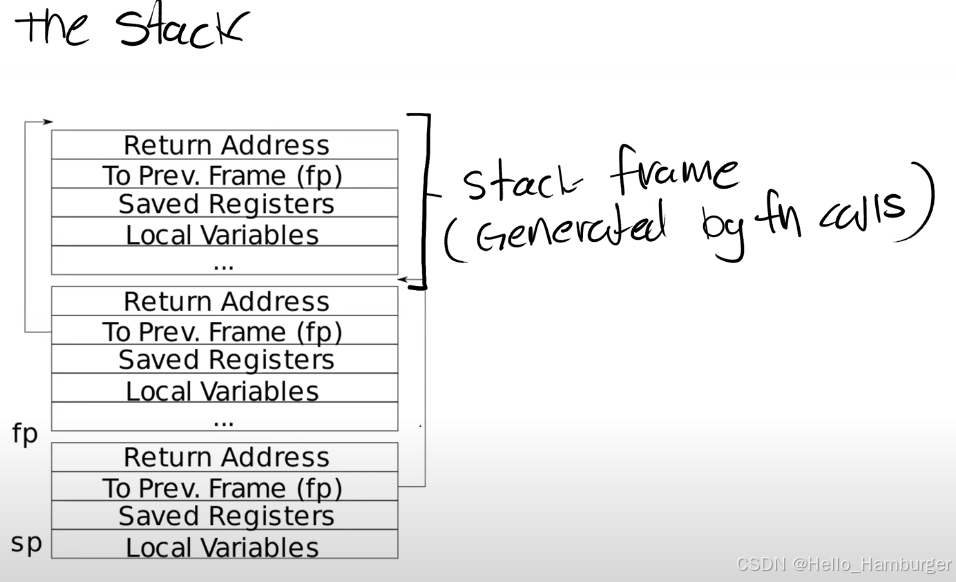
栈的结构
每调用一个函数,都会产生一个(stack frame),栈是从高地址开始向低地址使用。
- Return address总是会出现在Stack Frame的第一位
- 指向前一个Stack Frame的指针也会出现在栈中的固定位置(即Return address底下的位置)
- sp寄存器:指向Stack的底部并代表了当前Stack Frame的位置
- fp寄存器:指向当前Stack Frame的顶部,可以用来获取Return address以及指向上一个stack frame的指针
Trap机制:用户空间到内核空间的转换
- 程序执行系统调用
- 程序出现了类似page fault、运算时除以0的错误
- 一个设备触发了中断使得当前程序运行需要响应内核设备驱动
相关寄存器: - STVEC:指向内核中处理trap的指令的起始地址(确保代码执行跳到trampoline位置)
- SEPC:在trap的过程中保存程序计数器的值(保存用户程序执行的位置)
- SSRATCH:保存了trapframe的虚拟地址
trap从用户空间到内核空间的大概流程:
ECALL指令执行:将程序寄存器的数值保存到SPEC中(保存用户程序的执行位置);将STVEC寄存器中的地址加载到程序寄存器(代码执行位置跳到了trampoline);
uservec:交换a0寄存器和SSRATCH寄存器的值,此时trapframe的虚拟地址放到了a0寄存器中,此时把剩下保存用户程序执行的寄存器中的值保存到用户进程trapframe对应的内存区域。切换用户页表到内核页表,将sp寄存器指向对应进程的内核栈,接下来内核代码的运行将在进程对应的内核栈中运行。跳转到usertrap.
usertrap:确定用户空间跳转到内核空间的原因(页面中断,系统调用,外部设备中断等等),并进行处理。
usertrapret:细节不是那么重要了,遇到问题回去看代码就懂了。
userret:程序计数器恢复为用户程序的程序计数器,继续执行最初的用户程序。
页面中断47
相关寄存器:
STVAL:保存出错的虚拟地址,或者是触发page fault的源。
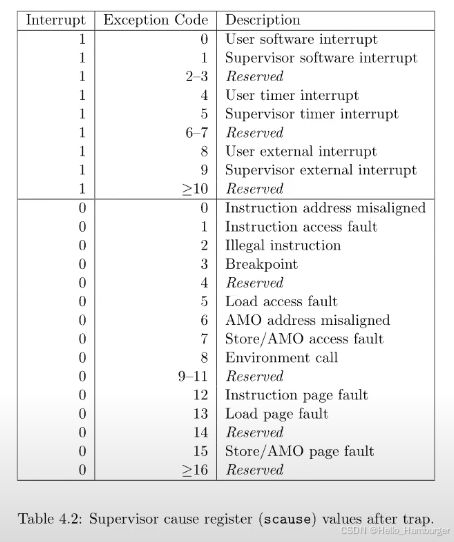
SCAUSE :保存发生trap的原因
页面中断主要用到的原因代码为13(load读取)和15(store 写入)
懒惰页面分配:用户进程申请内存时,先只增加可用空间大小,而不进行映射。这使得进程以为自己有了可用空间并对这些空间进行读写操作,但是由于没有进行内存映射,所以会发生页面中断,此时再对需要读写的页面进行映射,这样可以提高物理内存的空间利用率。不过,由于页面中断涉及用户空间和内核空间的切换,是有成本的。
Copy On Write Fork 在父进程中创建子进程,这里会涉及对父进程的内存的复制,Copy On Write Fork方案是创建的子进程的虚拟内存映射到和父进程一样的物理内存(子进程与父进程共享物理内存),仅当子进程需要访问修改共享物理内存时,为子进程申请独立的页面。这样子可以节省重复从堆区申请大量冗余的页面。
内存映射:为了降低外接存储设备的访问频率,可以将打开的文件的内存映射到物理内存的某一区域,此时可以通过访问物理内存来读取或修改原文件中的信息。
文件系统
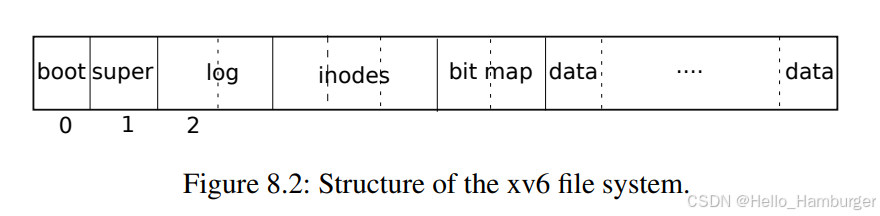
xv6文件系统布局(存储在硬盘中)
1个block:1024字节
block0: 无用或者用于boot sector(启动操作系统)
block1: super block, 它描述了文件系统。它可能包含磁盘上有多少个block共同构成了文件系统这样的信息。
block2 - block31: log信息
block32 - block45: innode信息(单个innode是64字节)一个block可以存储16个innode
block46: bitmap block,记录对应位置data block是否空闲
其余block: 存储文件内容信息data block
xv6中一个文件的最大大小如何确定?
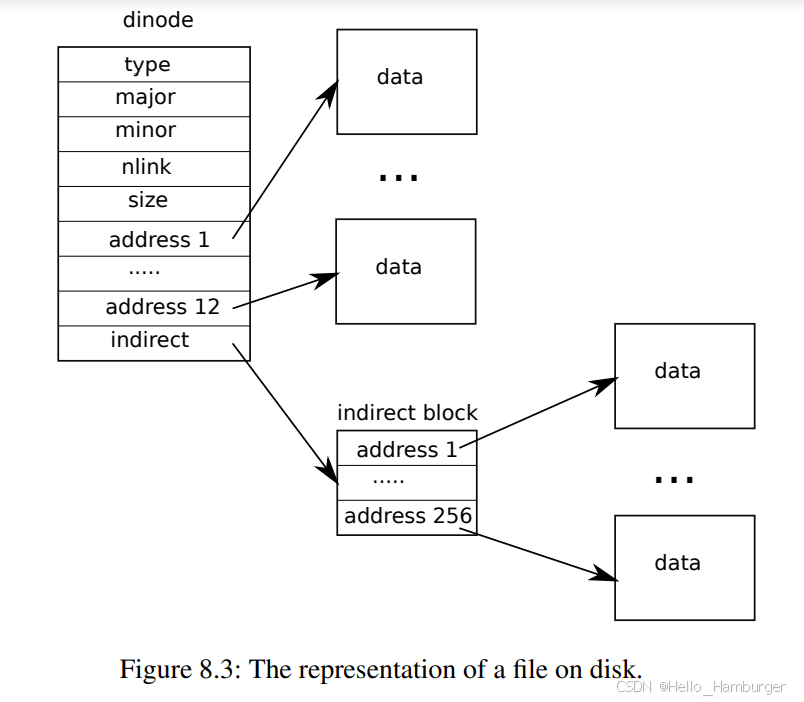
一个innode是64字节,其中有13*4 = 52个字节(13个block编号,每个编号占4个字节32位,即xv6最大可以索引2^32个block)指出了文件内容存储在哪个data block,其中前12个block编号的数值直接对应的就是存储文件数据的block,最后一个block是一个一级间接块(indirect block),这个block指向的块中又可以存储256个块号。即一个文件最大大小是(12+256)即268个data block.
硬盘布局:
[ boot block | super block | log | inode blocks | free bit map | data blocks]
相关代码:xv6中只有1000个block
// super block describes the disk layout:
struct superblock {uint magic; // Must be FSMAGICuint size; // Size of file system image (blocks)uint nblocks; // Number of data blocksuint ninodes; // Number of inodes.uint nlog; // Number of log blocksuint logstart; // Block number of first log blockuint inodestart; // Block number of first inode blockuint bmapstart; // Block number of first free map block
};
// On-disk inode structure
struct dinode {short type; // File type short major; // Major device number (T_DEVICE only)short minor; // Minor device number (T_DEVICE only)short nlink; // Number of links to inode in file system uint size; // Size of file (bytes) uint addrs[NDIRECT+2]; // Data block addresses
};
对xv6文件系统的理解:
从用户端理解:
文件名构成:根目录/子目录/当前目录/当前文件名。
dir和file 在底层都是一个数据文件,一个数据文件的信息由索引节点标识和内部数据组成,索引节点标识中给出了数据在硬盘中的存储区域,数据量大小,数据文件类型(dir还是file).dir数据文件中存储的是下一级dir和下一级file(由对应的Inode number(索引节点号码)和name组成),file数据文件中保存的是文本或代码。
打开文件过程中,会从根目录数据文件中通过搜索子目录名获取到子目录对应的inode number,接着根据inode number获取到子目录的数据文件,再通过该数据文件获取到当前目录的inode number…,进而得到当前文件名对应得innode number,就可以获取到当前文件的信息了,这就是文件系统读取一个文件中信息的过程。
硬链接:硬链接是指在硬盘中,一个数据文件对应一个 inode(索引节点)。在日常使用中,我们可能希望不同的文件名指向同一个数据文件。例如,当我们复制并重命名一个文件时,操作系统并不会为新文件申请一个新的 inode 或在硬盘上创建新的数据区域。其底层实现过程如下:首先获取旧文件的 inode,然后找到新文件名对应目录项的 inode。接着,将旧文件的 inode number(即 inode 索引号)和新文件的名称写入新文件目录项的数据文件中。这样,在新文件的目录项中新增了一条 entry,包含 inode number 和文件名,从而实现了硬链接。通过这种方式,两个文件名指向同一数据文件,共享相同的 inode。
软链接:软链接则是创建一个新的文件名,并为其分配一个新的 inode。在这个新的 inode 中,存储的是旧文件的路径(即文件名)。软链接本质上是一个指向旧文件的路径引用,而不是直接指向数据块。因此,软链接文件可以指向任何文件,包括不存在的文件,而硬链接只能指向已存在的文件,并且硬链接之间不会区分原文件和链接文件。
硬链接:多个文件名(目录项)指向同一个数据块,文件内容共享。
软链接:新文件名指向原文件的路径,可以跨文件系统,且可以指向不存在的文件。
缓存区高速缓存:频繁从磁盘中读取数据的过程非常慢,设定高速缓存区可以将磁盘中的某一个block对应到一个buffer空间中,在buffer中读写数据完成后再写入磁盘,有效提高程序执行效率。
日志:防止特殊情况,比如断电等特殊情况,使得写入磁盘的过程出现中断,可能会使得inode节点的信息与数据块的信息不对应,造成文件存储错误。日志的简单流程就是先将要写入的数据写入到log block中,等到所有的文件数据写完之后,在日志中标记写入完成,之后再将要写入inode block和data block中的数据从log block中迁移过去。(细节有需要的时候再去扣,现在没有必要)
内存映射实验
实现mmap函数(内存映射)和munmap(解除映射)函数
案例:mmap用于将一个内存映射到进程的虚拟地址空间中,通过mmap,程序可以在内存中直接访问文件的内容,而无需使用传统的 read 或 write 系统调用来逐字节地进行文件操作。
void *mmap(void *addr, size_t length, int prot, int flags,int fd, off_t offset);
在xv6中的底层实现:
懒加载:文件映射到进程虚拟地址空间中,最开始只会将进程虚拟地址空间增加length,但是这length空间并没有在进程页表中映射。当进程访问(读取或写入)这部分地址空间时才会利用页面中断机制,对这部分内存进行映射。
解除映射过程中,如果修改在进程地址空间中修改过的内容需要写回文件,在解除映射的时候将虚拟内存中的内容写入到文件当中去。
这样就实现了先将文件中的内容按需映射到进程虚拟地址空间中,然后在进程的虚拟地址空间中对文件内容进行读取更改,解除映射的时候再将文件内容写回到文件当中去(写回硬盘)。这样就避免了频繁反复从硬盘读取写入内容,可以由更好的性能。
Lock实验
临界条件:critical section
1.解决一个锁争用问题:
问题背景:多个进程在不断申请释放内存,这使得内核需要不断调用kalloc以及kfree函数,由于管理物理内存释放调用的链表用一个自旋锁进行保护,当不同CPU中的进程在一个时间段都要访问内存管理链表时,会发生锁争用等待,降低性能。
解决方案:将所有可申请的内存空间分配给不同的CPU,每个CPU针对一部分空间使用一个自旋锁进行保护,这样就可以每个CPU的进程申请释放内存互不干扰,更好提升性能。
2.对于buffer cache的理解:
操作系统缓存区命中:指在操作系统的缓存机制中,所请求的数据已经存在于缓存区内,操作系统能够直接从缓存中获取数据,而无需再次访问底层的存储设备(如硬盘、网络等)。缓存区命中是缓存系统高效工作的一个重要指标,能够显著提高数据访问速度和系统性能。
xv6中buffer cache是用一个双向链表连接了一组buffer数据块。当进程要从硬盘中读取一个block,并不是直接从硬盘读写,而是先为这个block在内存中申请一个buffer缓冲块,将硬盘中的内容读取到buffer数据块中,数据会暂时保存在这个数据块中。如果进程频繁读取就不用从硬盘中读取而是直接从缓冲块中读取,提高了性能,写入也是先写入缓存块再在合适的时间将所有数据同一写回硬盘,提高了性能。
struct logheader {int n;int block[LOGSIZE];
};
日志块中有一个block数组记录了日志块中保留的数据副本最后要写入到哪个数据块中
哪些情况要用锁?
一段内存共享,不同的进程同一时间进行读写;一段代码要具备原子性,如果被不同进程交错执行,会引发错误。
加锁限制了并发性,也限制了性能。
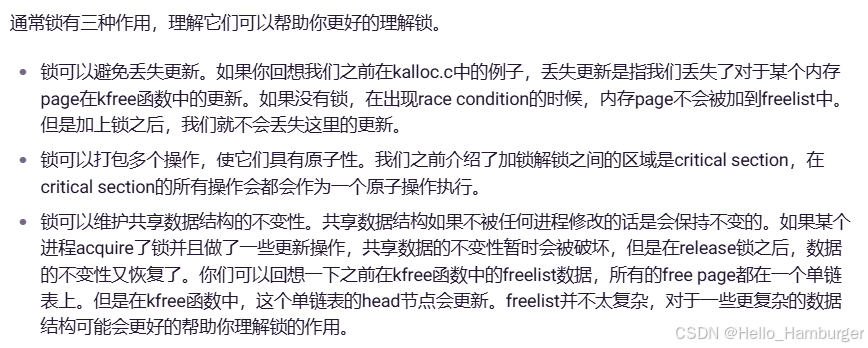
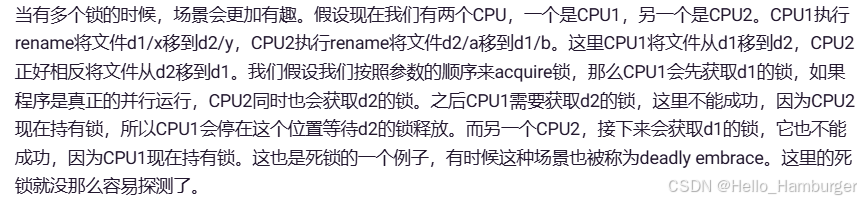
死锁情况:



自旋锁的实现
__sync_lock_test_and_set是一个原子操作,通过向锁的标志位写入1,并获取锁之前的标志位。如果之前的标志位为0,则现在成功获取了锁,如果之前的标志为1,则锁被占用,进入循环。原子操作为了防止一个进程释放锁,另外两个进程同时发现锁被释放,此时会发生两个CPU进程同时获取锁,导致错误。原子操作确保了一次只能有一个CPU进程访问锁的标志位。
void
acquire(struct spinlock *lk)
{push_off(); // disable interrupts to avoid deadlock.if(holding(lk))panic("acquire");// On RISC-V, sync_lock_test_and_set turns into an atomic swap:// a5 = 1// s1 = &lk->locked// amoswap.w.aq a5, a5, (s1)while(__sync_lock_test_and_set(&lk->locked, 1) != 0);// Tell the C compiler and the processor to not move loads or stores// past this point, to ensure that the critical section's memory// references happen strictly after the lock is acquired.// On RISC-V, this emits a fence instruction.__sync_synchronize();// Record info about lock acquisition for holding() and debugging.lk->cpu = mycpu();
}
xv6多核运行的理解,进程,线程调度
整体理解:
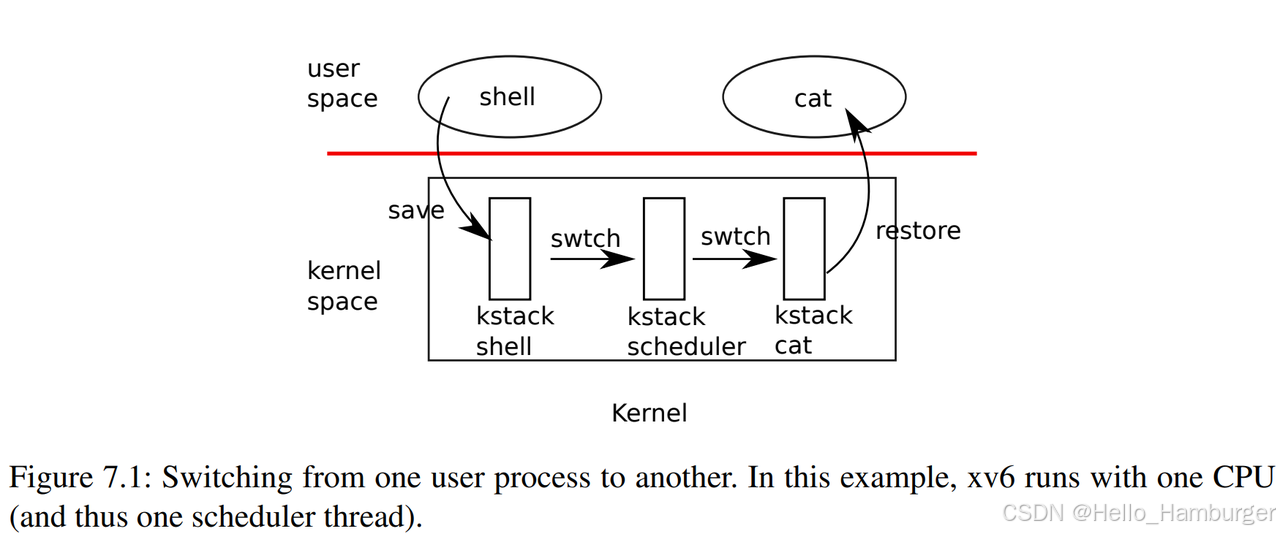
1.定时器中断,会使用户进程A从用户空间进入到内核空间kernel,此时程序函数调用执行在进程的内核栈,这里也可以说是正在执行内核线程。
2.从内核线程A通过swtch函数跳到调度器线程,这个过程中将进程A内核线程的相关寄存器保存到进程的context中,并从调度器线程即cpu的context取出数据到相关寄存器,此时程序就进入到了scheduler()函数中(死循环寻找状态为runable的进程),找到可以运行的进程B,通过swtch函数从调度器线程跳入到进程B的内核线程,这个过程将调度器线程的寄存器存入到cpu的context中,然后将进程B的context中的数据取出到相关寄存器,此时程序就执行到了进程B的内核线程位置(这个位置也是之前进程B发生调度的位置),之后从内核空间返回到用户空间中执行进程B在用户空间的程序。
3.多核cpu是指多个处理器并行运行,执行相同的代码。不同cpu执行的区别在于,不同cpu调度器线程使用的stack是不同的。程序中会通过从cpu的tp寄存器中获取cpuid,来决定不同cpu执行哪部分代码。
4.在内核空间之所以使用了进程A的内核线程,进程B的内核线程,调度器线程。是因为线程使用的内存空间是一致共用的,区别仅仅是不同线程执行程序的位置(保留在context中)不同,不同线程执行程序调用的堆栈地址不同。而不同进程的用户空间是不共享的,具有独立的虚拟页表,独立申请释放可用空间。
5.xv6中在进程的用户空间,并没有实现线程,按照我的理解,实现线程的步骤大概是:就是为每个线程设定独立的栈空间,设定独立的context存储相关寄存器(ra,sp等等),实现一个线程swtch函数实现不同线程的寄存器切换。这样就可以在不同线程之间切换。
1.每个cpu都会运行下方这三段程序,多核运行就是并行运行。
2.每个cpu都会有自己的cpuid,每个cpu通过查看自己的tp寄存器(tp寄存器在cpu内部,用作cpu标识)就可以知道自己的编号,同时也就知道了初始化main函数中哪部分程序自己不能运行。
3.初始化部分,为每个CPU设置了调度器线程,以及调度器线程运行的栈空间,调度器线程是进程调度之间的重要一环。(线程的标志就是有自己独立的context,记录自己的栈空间,函数返回地址,以及相关其他寄存器数据,这些决定了线程运行到了哪个位置,等再次调度时可以继续运行,同时不同线程是共享内存空间,内核中的线程共享内核页表对应的空间,用户进程中的线程共享用户进程的用户页表空间)
//汇编语言写成的启动程序# qemu -kernel loads the kernel at 0x80000000 //qemu内核将xv6内核加载到物理地址为0x80000000的内存中,地址范围0x0:0x80000000包含I/O设备# and causes each hart (i.e. CPU) to jump there. //每个 RISC-V 核心(Hart,代表一个处理器)会跳转到 0x80000000 地址,开始执行内核代码。# kernel.ld causes the following code to //kernel.ld 是链接器脚本,指定了内核代码将被放置在物理地址 0x80000000 处。# be placed at 0x80000000.
.section .text //指定接下来的代码是文本段(程序代码)
.global _entry // 声明 _entry 为全局符号,意味着它是程序的入口点,供链接器或加载器识别。
_entry: //代码的入口标签# set up a stack for C. //设置一个栈区运行C代码# stack0 is declared in start.c, # with a 4096-byte stack per CPU.# sp = stack0 + (hartid * 4096)//stack0 在 start.c 文件中声明,为每个 CPU(每个 Hart)分配了 4096 字节的栈空间。这里根据 hartid(每个 CPU 的 ID)来计算每个核心的栈空间。la sp, stack0li a0, 1024*4 // 将 a0 寄存器设置为 4096csrr a1, mhartid //将当前 CPU 的 ID(mhartid)读取到寄存器 a1 中。mhartid 是 RISC-V 的一个控制寄存器,表示当前核心的编号addi a1, a1, 1 //将 a1 寄存器中的值加 1,用来计算每个 CPU 的栈地址偏移(每个 CPU 的栈空间是独立的)mul a0, a0, a1 add sp, sp, a0# jump to start() in start.ccall start
spin:j spin
void
start()
{// set M Previous Privilege mode to Supervisor, for mret.unsigned long x = r_mstatus();x &= ~MSTATUS_MPP_MASK;x |= MSTATUS_MPP_S;w_mstatus(x);// set M Exception Program Counter to main, for mret.// requires gcc -mcmodel=medanyw_mepc((uint64)main);// disable paging for now.w_satp(0);//禁用虚拟页表// delegate all interrupts and exceptions to supervisor mode.w_medeleg(0xffff);w_mideleg(0xffff);w_sie(r_sie() | SIE_SEIE | SIE_STIE | SIE_SSIE);// configure Physical Memory Protection to give supervisor mode// access to all of physical memory.w_pmpaddr0(0x3fffffffffffffull);w_pmpcfg0(0xf);// ask for clock interrupts.timerinit();// keep each CPU's hartid in its tp register, for cpuid().int id = r_mhartid();w_tp(id);//mhartid寄存器读取较麻烦,tp寄存器读取较方便// switch to supervisor mode and jump to main().asm volatile("mret");
}
volatile static int started = 0;// start() jumps here in supervisor mode on all CPUs.
void
main()
{if(cpuid() == 0){consoleinit();printfinit();printf("\n");printf("xv6 kernel is booting\n");printf("\n");kinit(); // physical page allocatorkvminit(); // create kernel page table 创建内核页表(完成了设备部分和RAM部分的直接映射以及虚拟地址顶部的Trampoline以及进程内核栈的映射)kvminithart(); // turn on paging 安装内核页表,它将根页表页的物理地址写入寄存器satp。之后,CPU将使用内核页表转换地址。由于内核使用标识映射,下一条指令的当前虚拟地址将映射到正确的物理内存地址。procinit(); // process table 每个进程分配一个内核栈。它将每个栈映射到KSTACK生成的虚拟地址,这为无效的栈保护页面留下了空间。trapinit(); // trap vectorstrapinithart(); // install kernel trap vectorplicinit(); // set up interrupt controllerplicinithart(); // ask PLIC for device interruptsbinit(); // buffer cacheiinit(); // inode tablefileinit(); // file tablevirtio_disk_init(); // emulated hard diskuserinit(); // first user process__sync_synchronize();started = 1;} else {while(started == 0);__sync_synchronize();printf("hart %d starting\n", cpuid());kvminithart(); // turn on paging kvmmap将映射的PTE添加到内核页表中,对kvminithart的调用将内核页表重新加载到satp中,以便硬件知道新的PTE。trapinithart(); // install kernel trap vectorplicinithart(); // ask PLIC for device interrupts}scheduler();
}
从上面的代码可以看出,每个cpu执行到main函数最后都会执行下方的 scheduler()函数,这里面是一个死循环,不断进行进程调用。每个cpu结构体中proc代表了在当前cpu中执行的进程,context存储了cpu调度器进程切换到其他进程内核线程前的寄存器(包括调度器线程的ra,sp等等),因为一段时间后程序还要回来进行调度其他进程的。
// Per-CPU state.
struct cpu {struct proc *proc; // The process running on this cpu, or null.struct context context; // swtch() here to enter scheduler().int noff; // Depth of push_off() nesting.int intena; // Were interrupts enabled before push_off()?
};
// Per-CPU process scheduler.
// Each CPU calls scheduler() after setting itself up.
// Scheduler never returns. It loops, doing:
// - choose a process to run.
// - swtch to start running that process.
// - eventually that process transfers control
// via swtch back to the scheduler.
void
scheduler(void)
{struct proc *p;struct cpu *c = mycpu();c->proc = 0;for(;;){// The most recent process to run may have had interrupts// turned off; enable them to avoid a deadlock if all// processes are waiting.intr_on();int found = 0;for(p = proc; p < &proc[NPROC]; p++) {acquire(&p->lock);if(p->state == RUNNABLE) {// Switch to chosen process. It is the process's job// to release its lock and then reacquire it// before jumping back to us.p->state = RUNNING;c->proc = p;swtch(&c->context, &p->context);// Process is done running for now.// It should have changed its p->state before coming back.c->proc = 0;found = 1;}release(&p->lock);}if(found == 0) {// nothing to run; stop running on this core until an interrupt.intr_on();asm volatile("wfi");}}
}
swtch函数:从当前线程转到另外的线程中执行。在xv6中主要涉及:从进程内核线程跳转到cpu调度器线程;从cpu调度器线程跳转到其他进程的内核线程。
# Context switch
#
# void swtch(struct context *old, struct context *new);
#
# Save current registers in old. Load from new.
.globl swtch
swtch:sd ra, 0(a0)sd sp, 8(a0)sd s0, 16(a0)sd s1, 24(a0)sd s2, 32(a0)sd s3, 40(a0)sd s4, 48(a0)sd s5, 56(a0)sd s6, 64(a0)sd s7, 72(a0)sd s8, 80(a0)sd s9, 88(a0)sd s10, 96(a0)sd s11, 104(a0)ld ra, 0(a1)ld sp, 8(a1)ld s0, 16(a1)ld s1, 24(a1)ld s2, 32(a1)ld s3, 40(a1)ld s4, 48(a1)ld s5, 56(a1)ld s6, 64(a1)ld s7, 72(a1)ld s8, 80(a1)ld s9, 88(a1)ld s10, 96(a1)ld s11, 104(a1)ret
睡眠锁的实现
解决lost-wakeup问题:
这个问题比较复杂,忘记了就再回去看一下教程。
解决条件:
- 调用sleep时需要持有condition lock,这样sleep函数才能知道相应的锁。(确保持有睡眠锁的一方可以开始释放睡眠锁)
- sleep函数只有在获取到进程的锁p->lock之后,才能释放condition lock。
- wakeup需要同时持有两个锁才能查看进程。(wakeup只有当另一个未持有锁的进程设置成sleep状态之后,释放进程锁后菜才能唤醒该进程)
void
acquiresleep(struct sleeplock *lk)
{acquire(&lk->lk);//必须先获取自旋锁while (lk->locked) {sleep(lk, &lk->lk);//在sleep中释放自旋锁,如果不释放,另一个持有锁的进程就无法释放睡眠锁}lk->locked = 1;lk->pid = myproc()->pid;release(&lk->lk);
}
void
releasesleep(struct sleeplock *lk)
{acquire(&lk->lk);//另一个进程在sleep中释放了自旋锁,这里才能获取lk->locked = 0;lk->pid = 0;wakeup(lk);release(&lk->lk);
}
void
void
sleep(void *chan, struct spinlock *lk)
{struct proc *p = myproc();// Must acquire p->lock in order to// change p->state and then call sched.// Once we hold p->lock, we can be// guaranteed that we won't miss any wakeup// (wakeup locks p->lock),// so it's okay to release lk.acquire(&p->lock); //DOC: sleeplock1release(lk);// Go to sleep.p->chan = chan;p->state = SLEEPING;sched();// Tidy up.p->chan = 0;// Reacquire original lock.release(&p->lock);acquire(lk);
}
wakeup(void *chan)
{struct proc *p;for(p = proc; p < &proc[NPROC]; p++) {if(p != myproc()){acquire(&p->lock);if(p->state == SLEEPING && p->chan == chan) {//查看是不是这个进程在睡眠等待事件发生p->state = RUNNABLE;}release(&p->lock);}}
}
如何理解父进程与子进程的执行
1.在用户空间中,一个进程(father)调用fork函数创建子进程(son),子进程会完全复制父进程的一切,包括页表内容,trapframe中的内容,stack中的内容,堆区的内容,代码段,数据段的内容。即子进程可以看作是一个父进程的副本。
2.father进程调用fork系统调用进入内核空间,将用户空间运行的相关的寄存器全部保存到了trapframe中,而son进程则完全复制了trapframe中的内容,也就是说当son进程在内核中被调度并返回到son进程用户空间时,程序执行的位置和father进程程序执行的位置是一样的,即father进程和son进程在用户空间都运行到了pid = fork();这段代码。
3.唯一不同的点是fork函数中对子进程中np->trapframe->a0的值赋值为0,而np->trapframe->a0的值对应的则是内核调用的返回值,即pid的值,此时father进程的pid的值为大于0的pid数值,而子进程的pid数值为0.通过这一点就能够很好的区分父进程执行哪一段代码,子进程执行哪一段代码。对于没有pid判断语句的代码区域,是父进程和子进程都会执行的区域。
4.这就解释了在用户空间中pid判断语句的代码。
5.一个进程要释放,先运行exit,再运行wait,wait函数中才是真正释放进程页表等相关内容,exit只是释放了相关文件引用,并将进程状态设置为ZOMBIE,wait函数检测到ZOMBIE只会则会回收该进程的一切。(其中也用到了sleep_wakeup机制)
int pid = fork();
if(pid > 0) {printf("parent: child=%d\n", pid);pid = wait((int *) 0);printf("child %d is done\n", pid);
} else if(pid == 0) {printf("child: exiting\n");exit(0);
} else {printf("fork error\n");
}
int
fork(void)
{int i, pid;struct proc *np;struct proc *p = myproc();//获取父进程信息// Allocate process.//分配进程if((np = allocproc()) == 0){return -1;//内存申请失败}// Copy user memory from parent to child.//复制父进程页表信息到子进程中,父子进程公用页表信息if(uvmcopy(p->pagetable, np->pagetable, p->sz) < 0){freeproc(np);release(&np->lock);return -1;}np->sz = p->sz;// copy saved user registers.*(np->trapframe) = *(p->trapframe);//公用寄存器信息// Cause fork to return 0 in the child.np->trapframe->a0 = 0; //a0寄存器为0// increment reference counts on open file descriptors. //文件描述符计数for(i = 0; i < NOFILE; i++)if(p->ofile[i])np->ofile[i] = filedup(p->ofile[i]);//子进程复制父进程文件句柄np->cwd = idup(p->cwd);//复制当前目录safestrcpy(np->name, p->name, sizeof(p->name));//添加一句话将跟踪掩码从父进程复制到子进程np->tracemask = p->tracemask;pid = np->pid;release(&np->lock);acquire(&wait_lock);np->parent = p;release(&wait_lock);acquire(&np->lock);np->state = RUNNABLE;release(&np->lock);return pid;
}
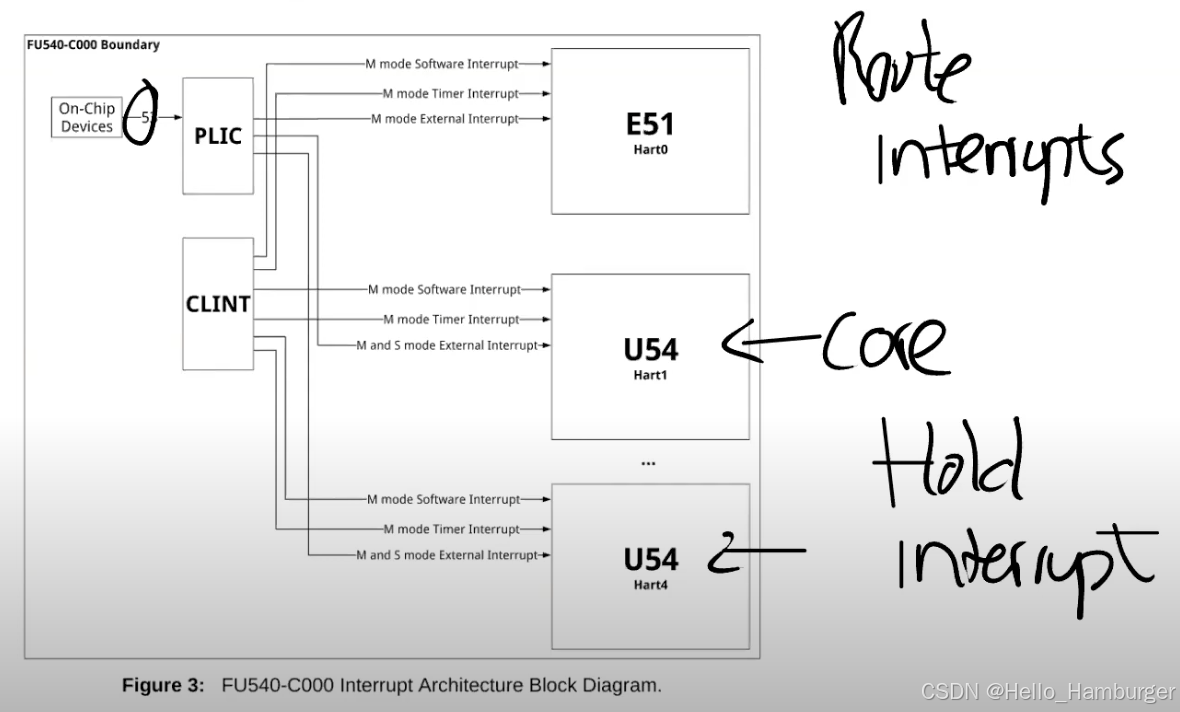
中断
PLIC会管理外设中断。会先通知所有cpu发生了中断,只会有一个cpu接收中断,之后PLIC就会将中断的具体情况发送给对应CPU,如果当前所有CPU都在处理中断,那么PLIC会暂时将中断信息保留下来,等到有CPU空闲时才会处理中断。CPU核处理完中断之后,CPU会通知PLIC,PLIC将不再保存中断的信息。
进程结束
exit(0)只是关闭了进程的相关文件fd,并将进程的状态修改为ZOMBE
wait(0)是用来释放进程的内存的。
释放进程exit和wait是需要同时调用的,一个都少不来。
exit的传入参数指出了当前进程结束是正常结束0还是说异常计数-1
wait(&status)可以将exit的传入参数保存到变量status中去,这样就知道进程是如何结束掉的了,可以用来debug.这下搞清楚了。wait传入0参数表明不关心进程是如何结束的。主动调用exit(0)是一个比较好的习惯。C语言当程序执行完之后也会默认自动调用exit关闭相关文件描述符。子进程的close(fd)不管也行的,但是为了维护者方便,子进程中额外使用的文件描述符最好使用close(fd),方便维护者理解代码。