基于RT-Thread的STM32F4开发第六讲——PWM输出(CH1和CH1N)
文章目录
- 前言
- 一、RT-Thread工程创建
- 二、PWM工作函数编写
- 1.user_pwm.c
- 2.user_pwm.h
- 2.main.h
- 三、效果展示
- 四、工程分享
前言
本章是基于RT-Thread studio实现PWM一对互补信号输出,开发板是正点原子的STM32F4探索者,使用的RT-Thread驱动是5.1.0。本章官方驱动文档内容较好,改动地方很少,开发难度小。
一、RT-Thread工程创建
从以前文章得到驱动5.1.0不报错工程,打开cubemx,其他外设配置不多说,定时器配置如下。
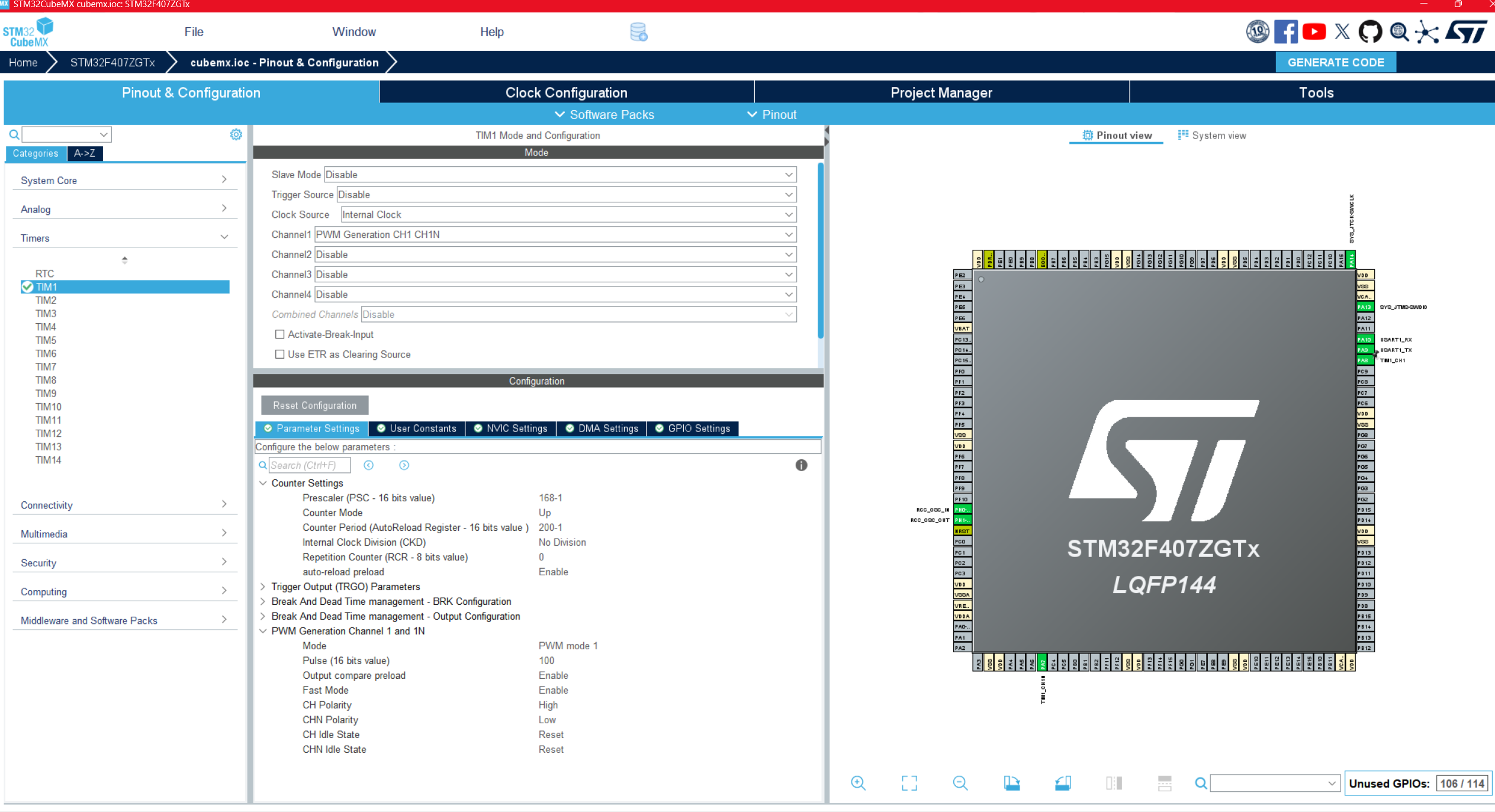
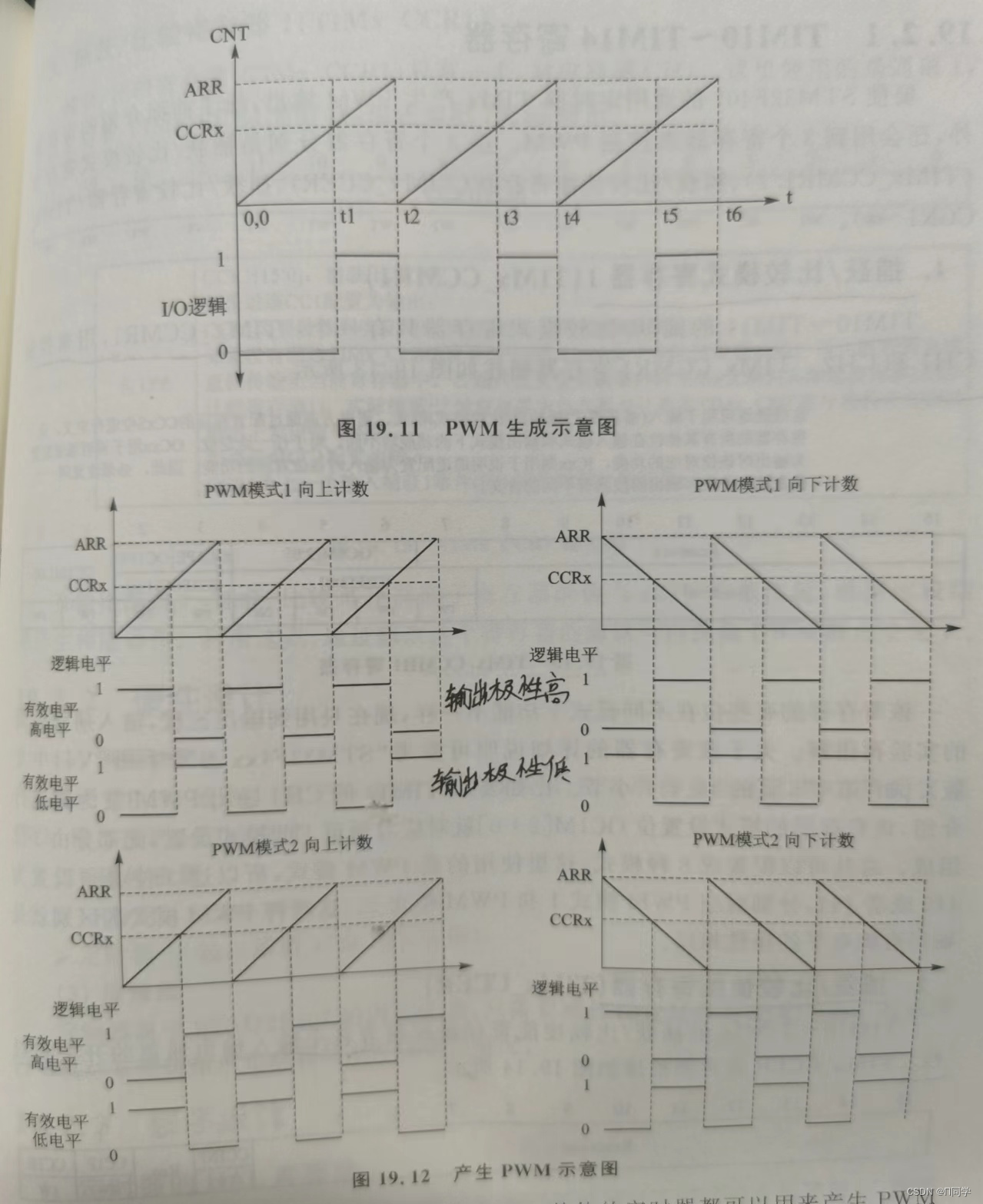
注意,一般设置CH极性与CHN极性相反,这样才能得到一个互补的PWM信号,否则就是同样的PWM信号。一个PWM输出在形式上与它的模式、计数方式和极性有关。如图所示
CH ldle state与CHN ldle state是设置空闲时两个通道输出电平,一般设置为低电平,防止驱动设备损坏。对于所谓的快速模式(fast mode)我测试了一下,即使是高频率(1M以上)PWM输出,开启快速模式,PWM波形在示波器上没什么变化,不知道作用在哪。
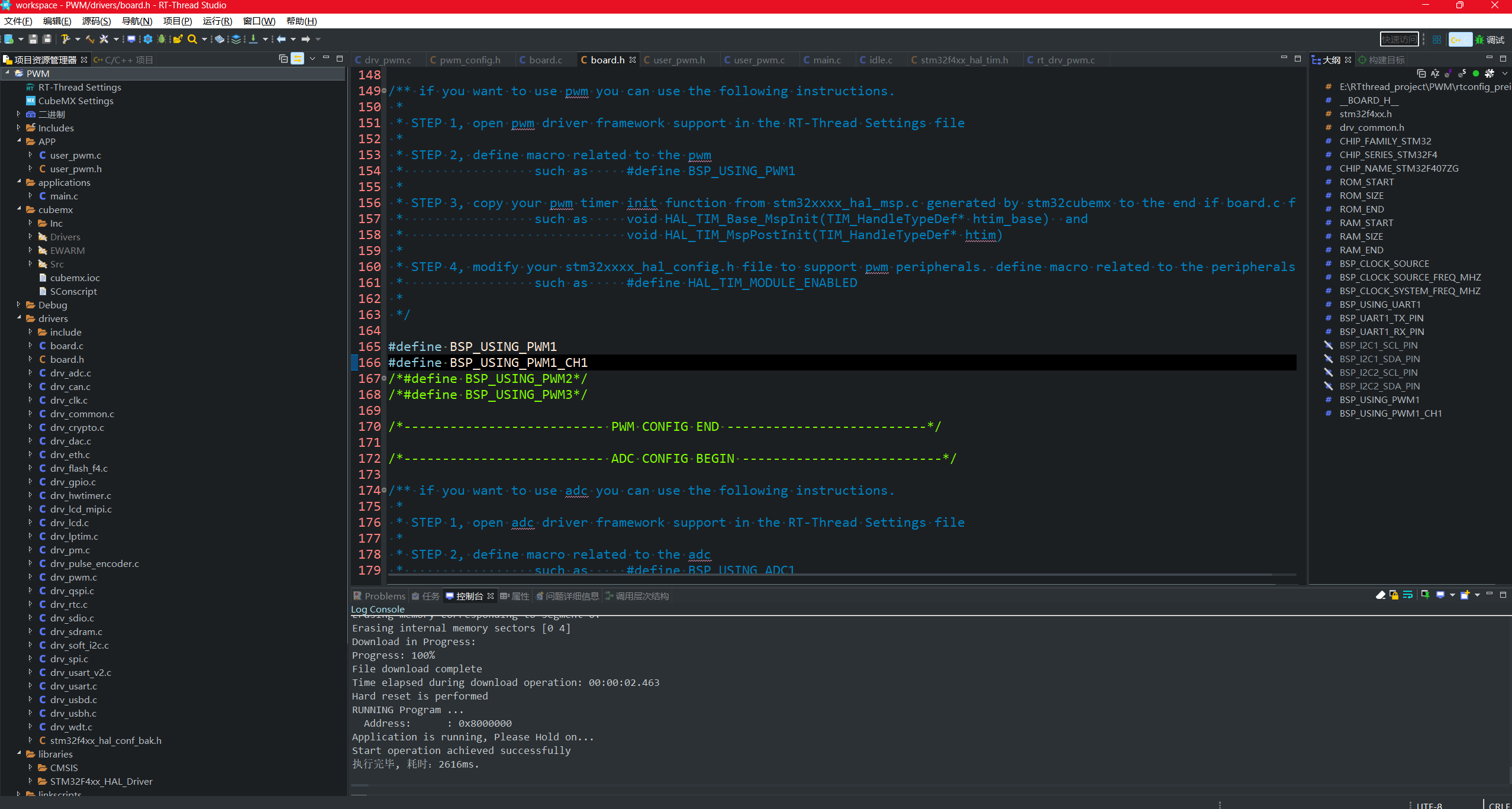
配置好cubemx,生成工程,接下来和前面文章外设一样,按要求STEP x做就行,如图。
这里定义了#define BSP_USING_PWM1_CH1这个不是必须项,可以理解为使能你使用PWM的通道,建议使能。
进入pwm_config.h,我使用的是定时器1的通道1来输出PWM,文件内原本没有,按同样格式添加就行。
如果上一步没定义#define BSP_USING_PWM1_CH1,那么这里的通道不能选为0,得选择你使用的通道,这样也可以实现效果。不过整个定时器只能使用一个通道了,所以不建议这么操作。

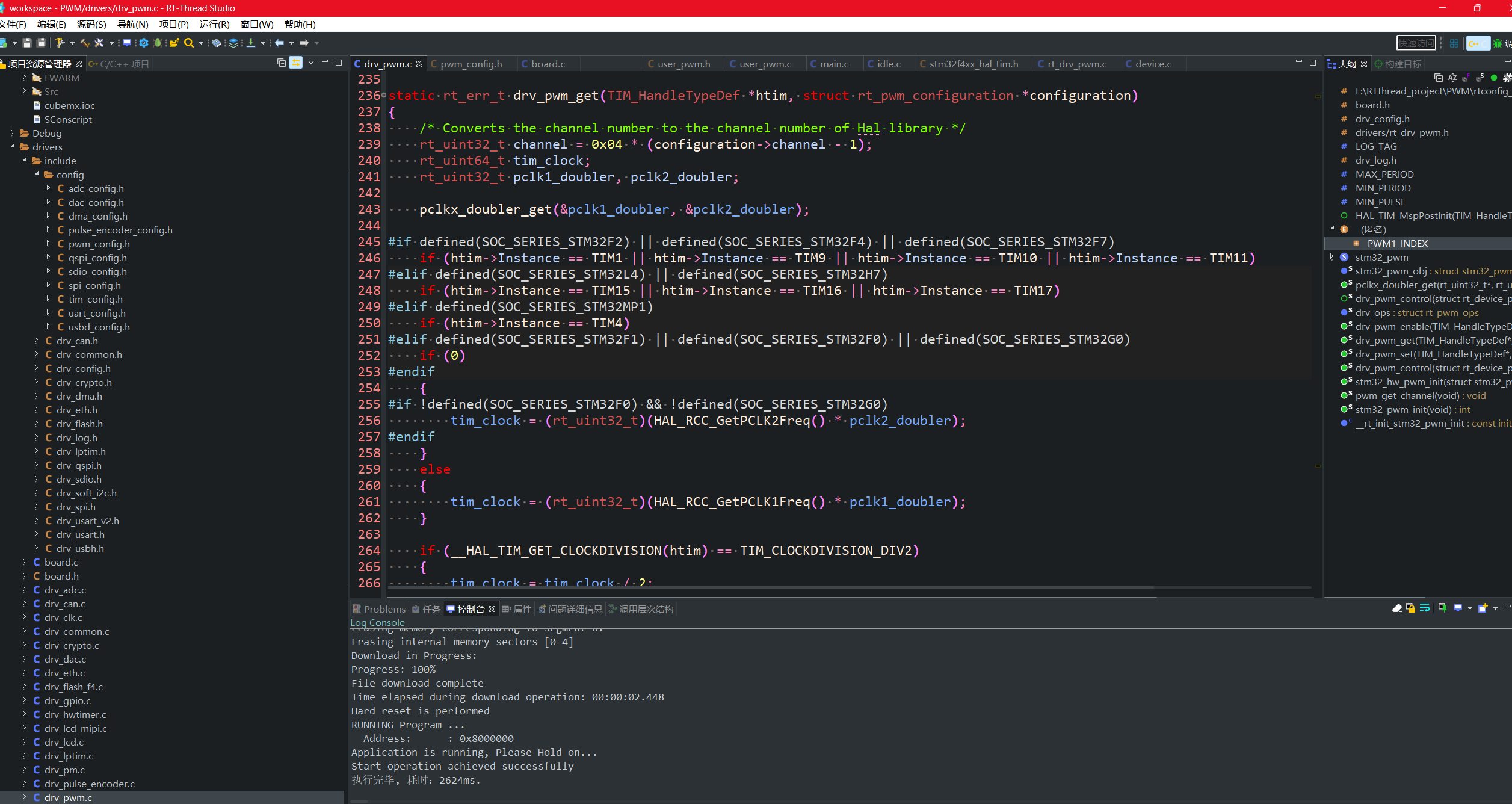
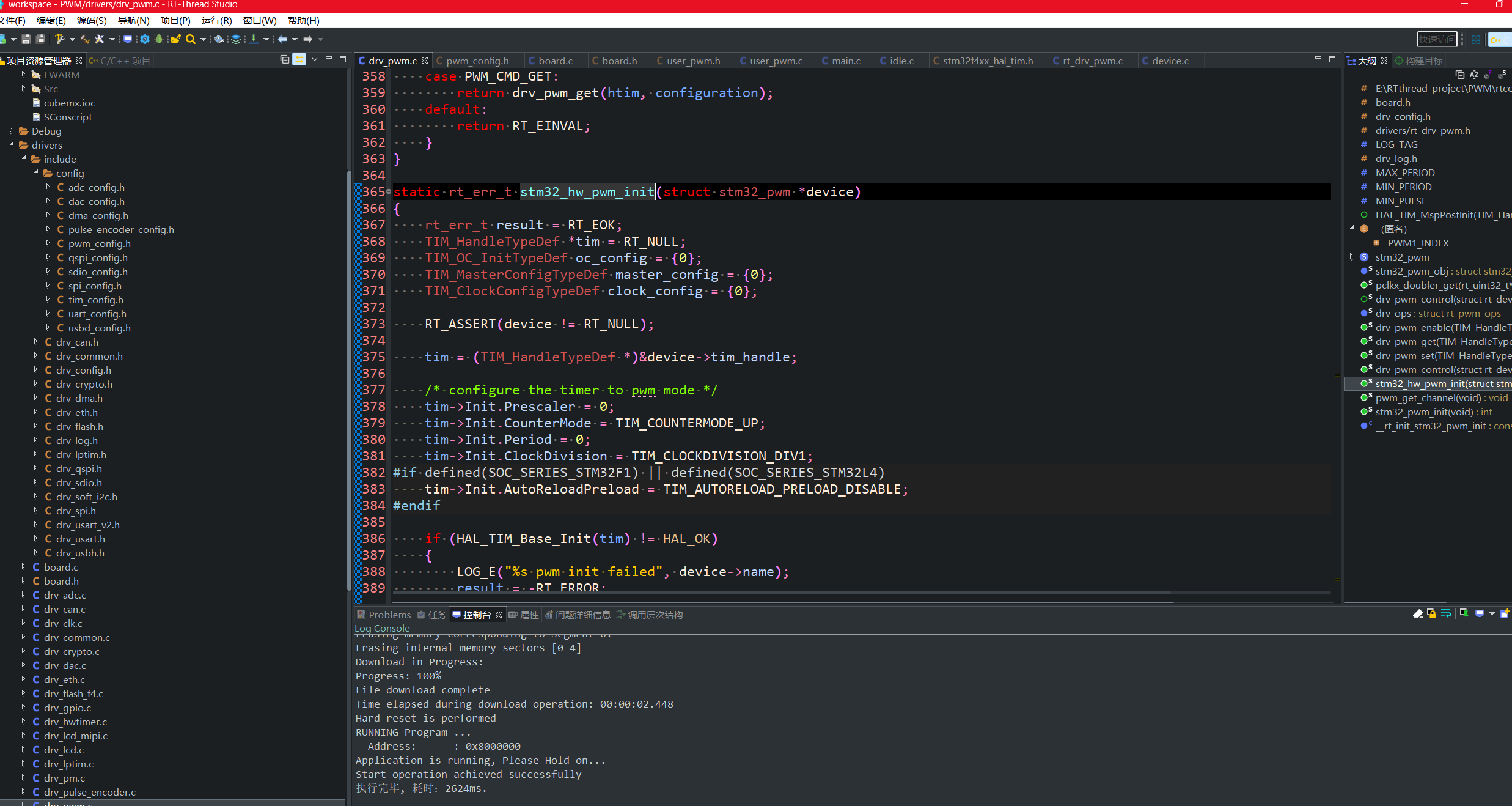
接着进入drv_pwm.c文件
注意在drv_pwm_get函数和drv_pwm_set函数,仔细看看需编译指令里的芯片型号和定时器有没有你需要的,这些函数都是设置pwm的时钟频率,至关重要。比如说在246句的if判断下原本只有TIM9、TIM10、TIM11,但其实TIM1和TIM8也属于这个其中,都是挂载在APB2上的,我这里使用了TIM1,所以我就加入了TIM1。
在stm32_hw_pwm_init函数就是设置具体的pwm配置了,对照你cubemx生成的pwm配置函数更改即可,可以看到这里的预分频指数和重装数都为0,不建议更改,因为RT-Thread提供了上层函数来更改这些内容。
后面有个函数pwm_get_channel,如果已开启board.h中没有定义BSP_USING_PWM1_CH1那么这个函数将不可用。建议根据这个函数的预编译指令去定义你需要的通道。
二、PWM工作函数编写
代码逻辑很简单,不解释,看手册就行
1.user_pwm.c
#include "user_pwm.h"#define DBG_TAG "user_pwm"
#define DBG_LVL DBG_LOG
#include <rtdbg.h>#define PWM_NAME "pwm1"
#define PWM_CHANNEL 1
#define PWM_CHANNEL_N -1
#define PWM_PERIOD 100000
#define PWM_PULSE 75000
void pwm_init(void)
{rt_err_t flag;struct rt_device_pwm *pwm1_handle;pwm1_handle = (struct rt_device_pwm *)rt_device_find(PWM_NAME);if(pwm1_handle == RT_NULL){LOG_D("failed to pwm1 handle fine");return;}flag = rt_pwm_set(pwm1_handle, PWM_CHANNEL, PWM_PERIOD, PWM_PULSE);if(flag != RT_EOK){LOG_D("failed to pwm1 CH1 set");return;}flag = rt_pwm_set(pwm1_handle, PWM_CHANNEL_N, PWM_PERIOD, PWM_PULSE);if(flag != RT_EOK){LOG_D("failed to pwm1 CH1N set");return;}flag = rt_pwm_enable(pwm1_handle,PWM_CHANNEL);if(flag != RT_EOK){LOG_D("failed to pwm1 CH1 enable");return;}flag = rt_pwm_enable(pwm1_handle,PWM_CHANNEL_N);if(flag != RT_EOK){LOG_D("failed to pwm1 CH1N enable");return;}
}
2.user_pwm.h
#ifndef APP_USER_PWM_H_
#define APP_USER_PWM_H_#include <board.h>
void pwm_init(void);#endif /* APP_USER_PWM_H_ */
2.main.h
#include <rtthread.h>#define DBG_TAG "main"
#define DBG_LVL DBG_LOG
#include <rtdbg.h>#include "user_pwm.h"
int main(void)
{pwm_init();while (1){rt_thread_mdelay(1000);}return RT_EOK;
}
三、效果展示
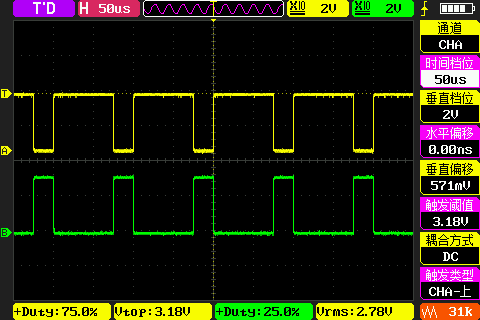
可以看到通道1(黄)输出了10KHz,75%占空比的PWM正弦波,通道2(绿)输出的相位相反
四、工程分享
通过网盘分享的文件:PWM.zip
链接: https://pan.baidu.com/s/1wOMq_9n68f6Cvkp8re6dXA?pwd=e22r 提取码: e22r