黑马k8s(七)

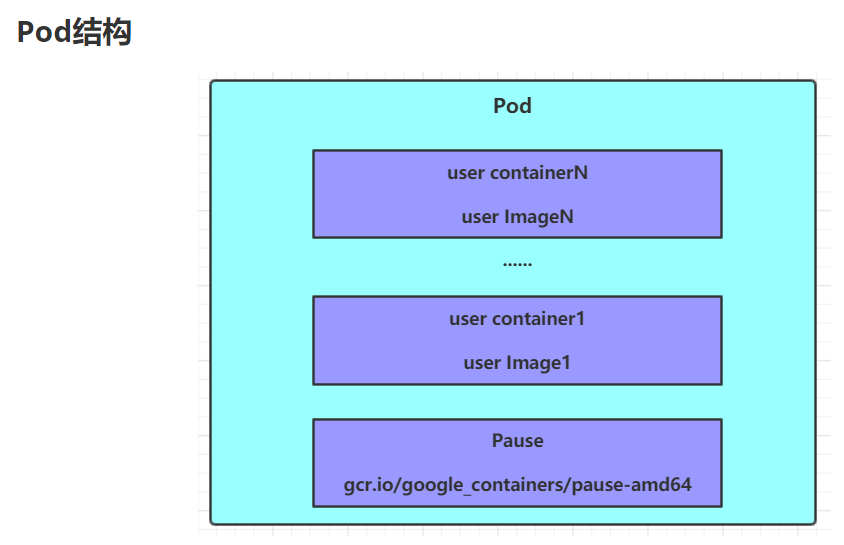
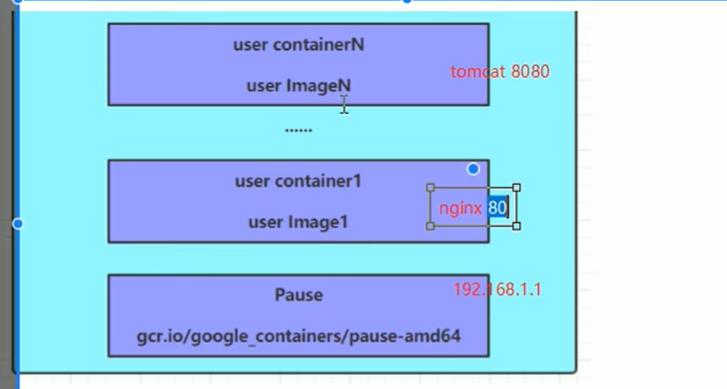
1.Pod介绍

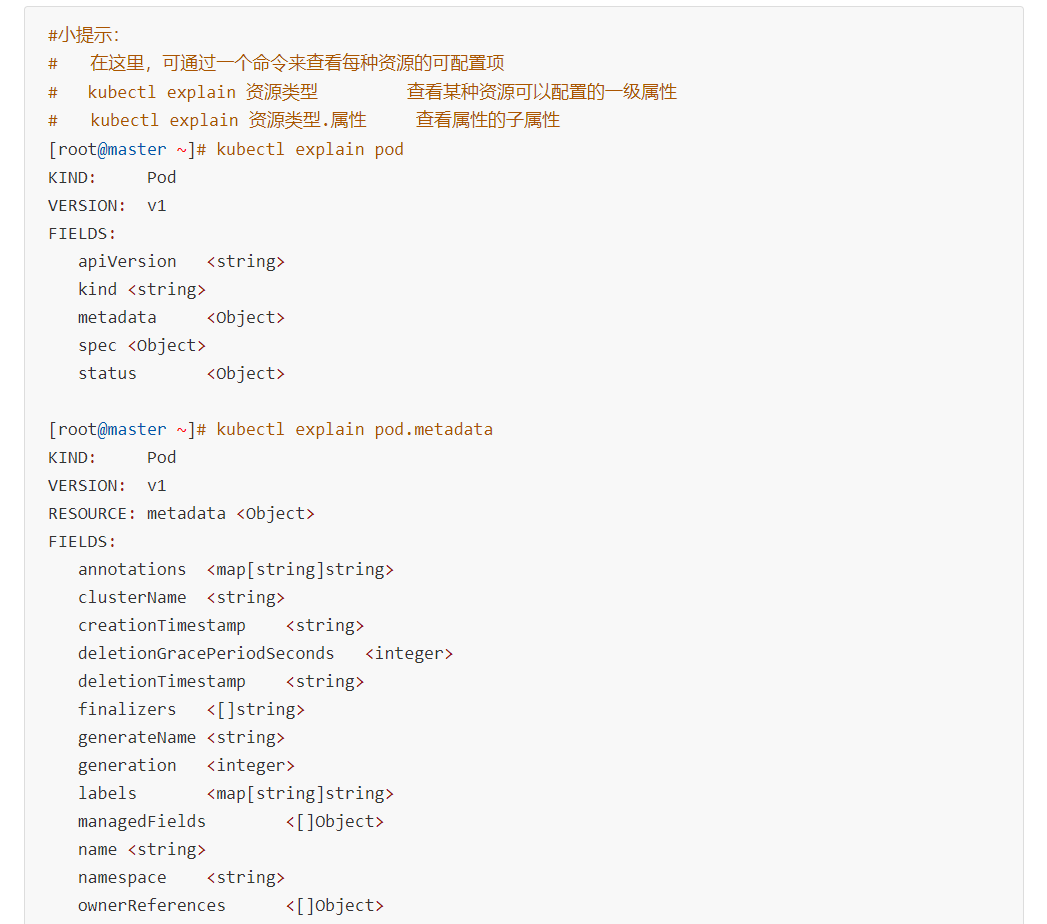


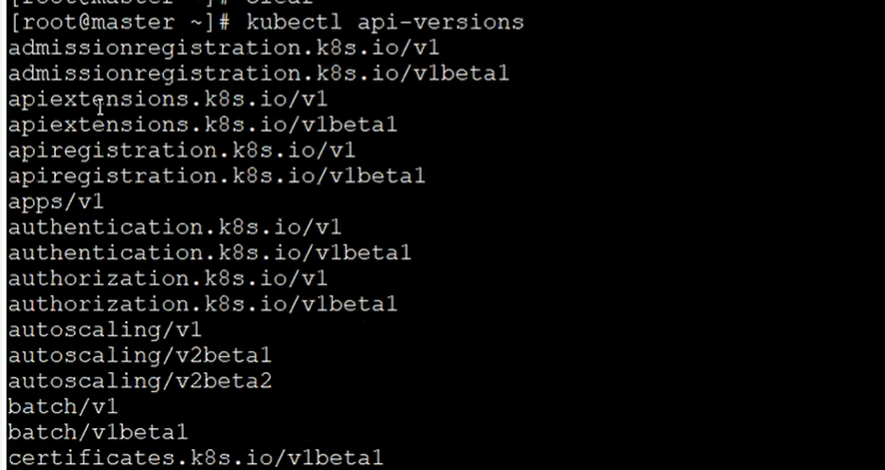
查看版本:
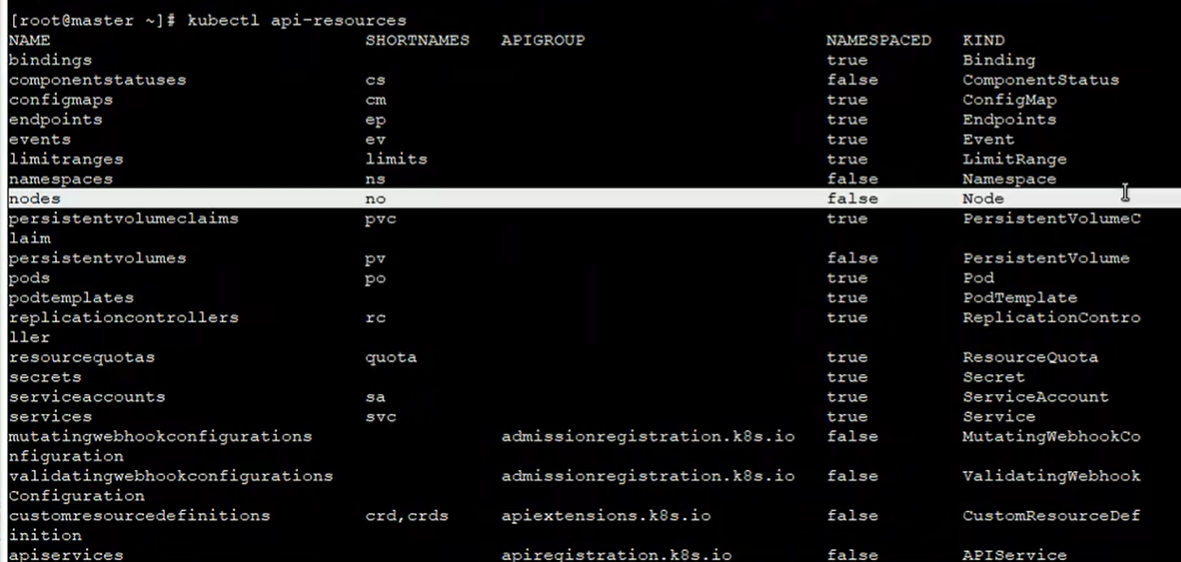
查看类型,这里加s跟不加s没啥区别,可加可不加
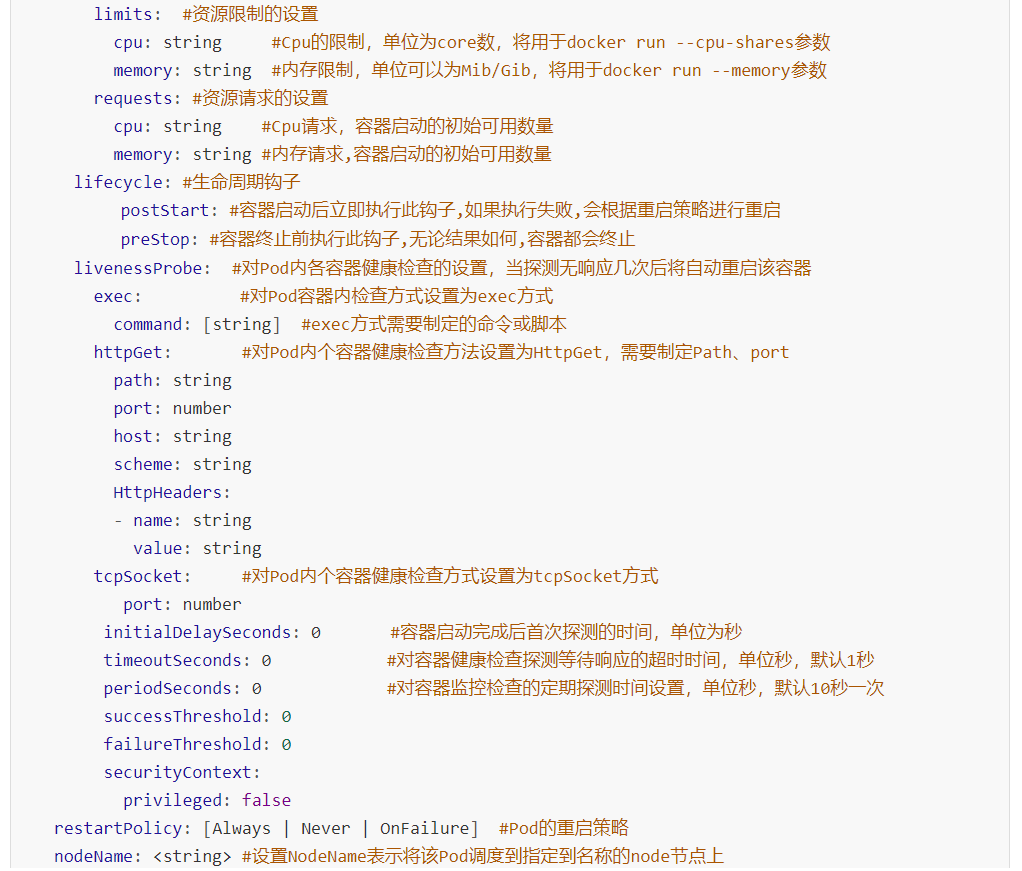
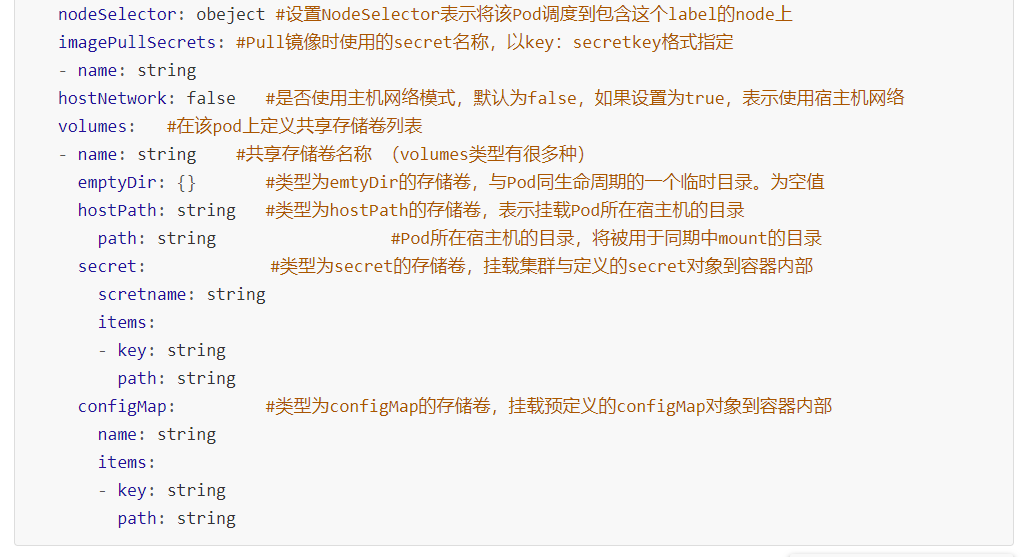
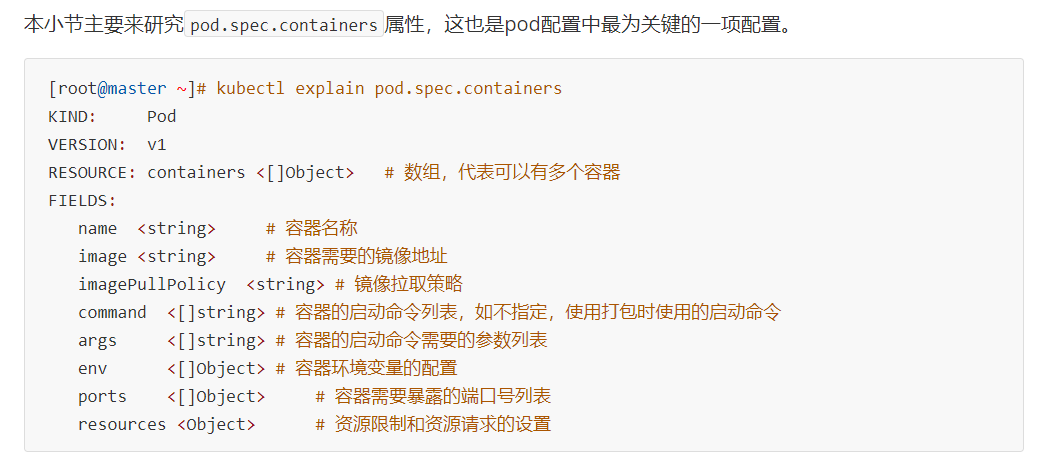
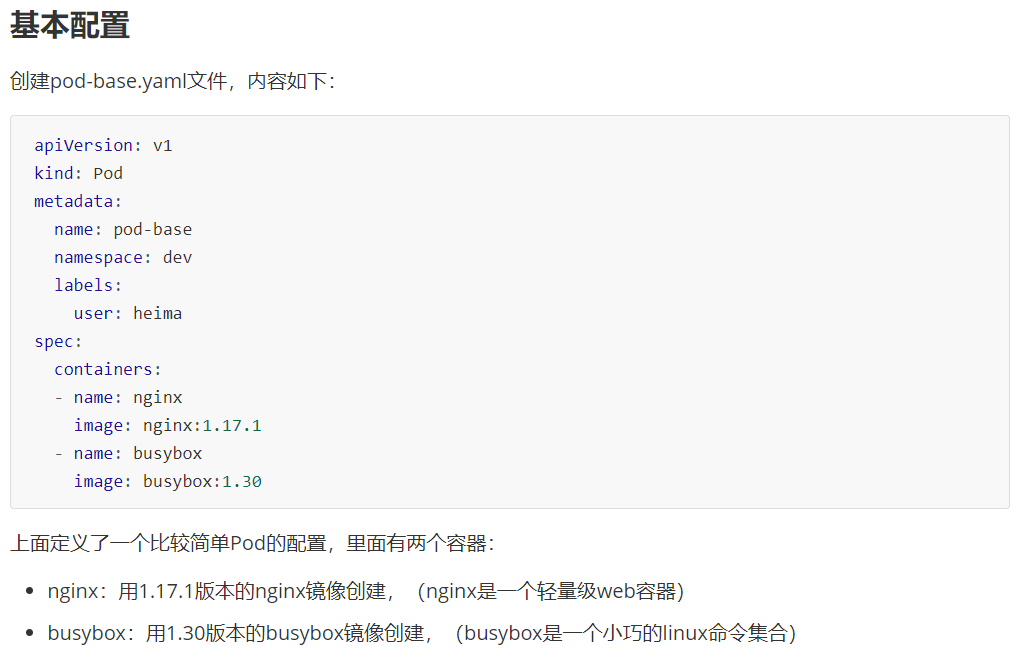
2.Pod基本配置


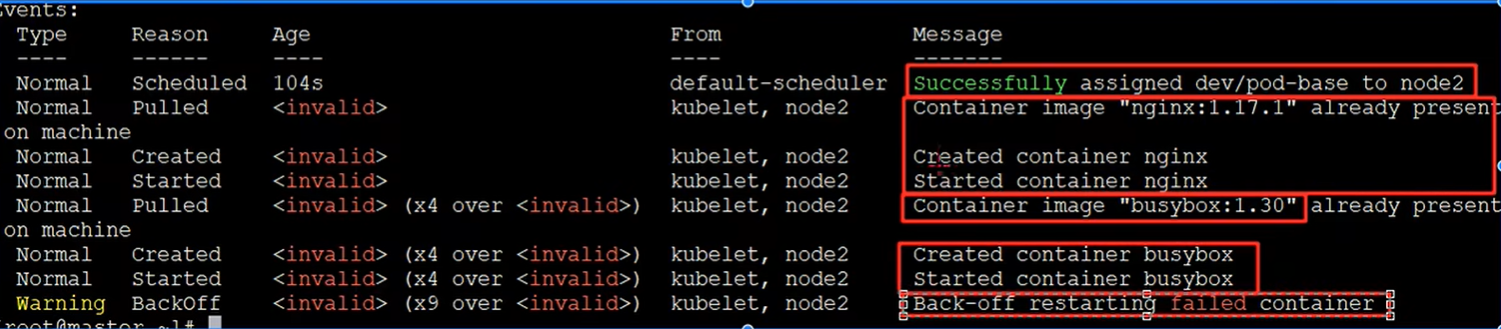
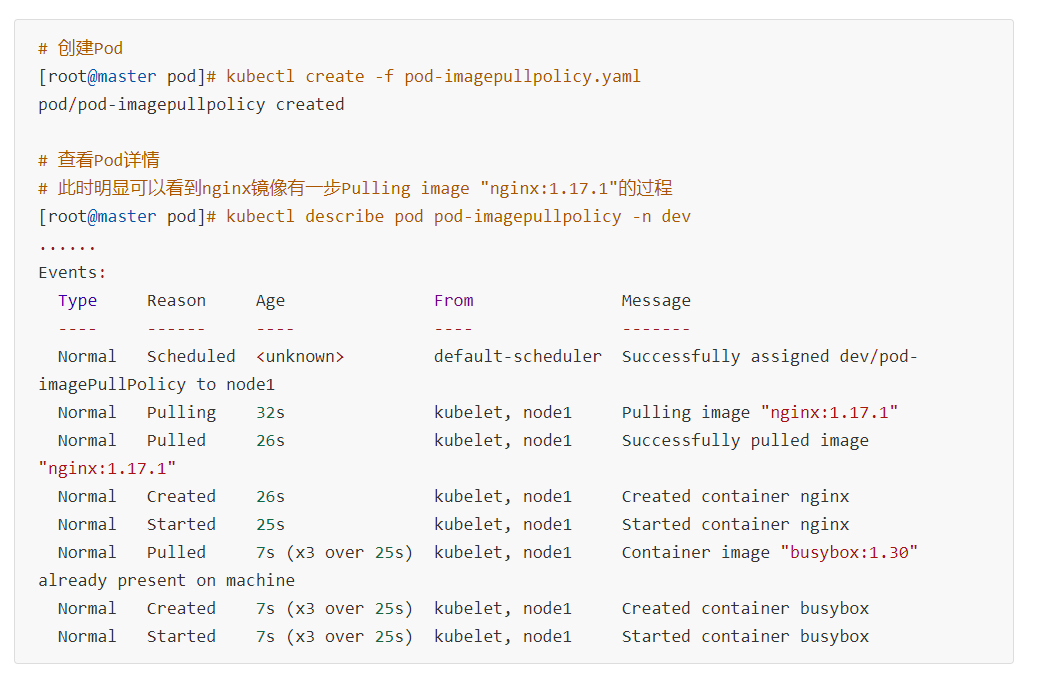
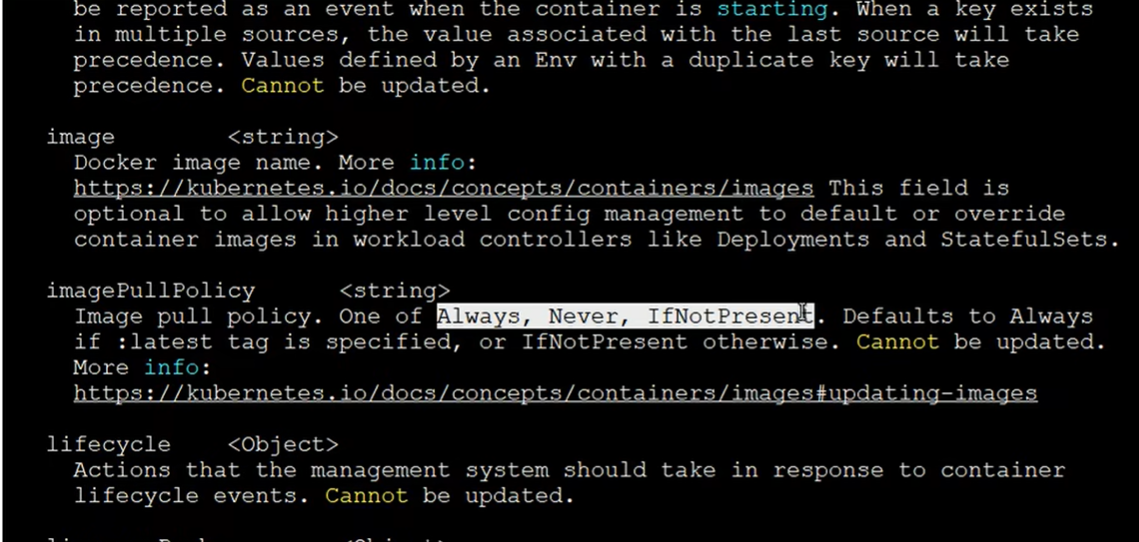
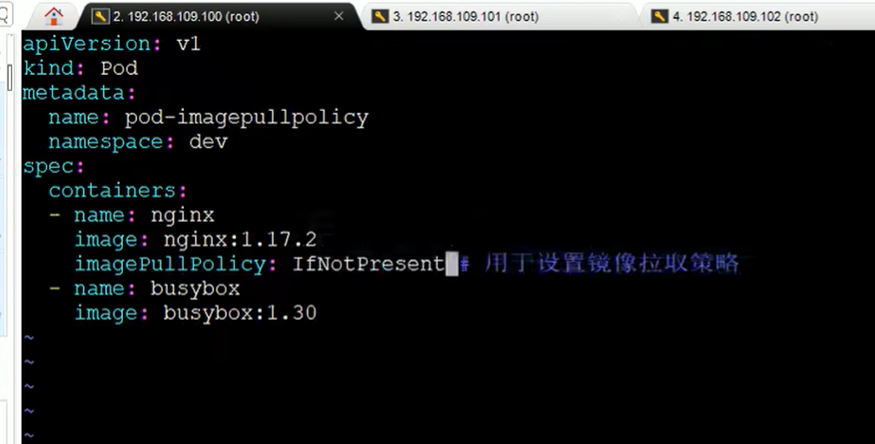
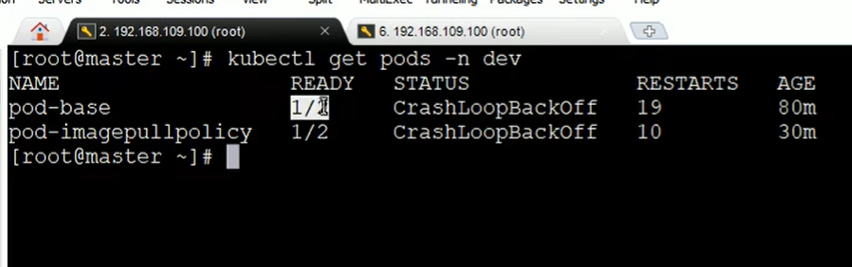
3.镜像拉去策略

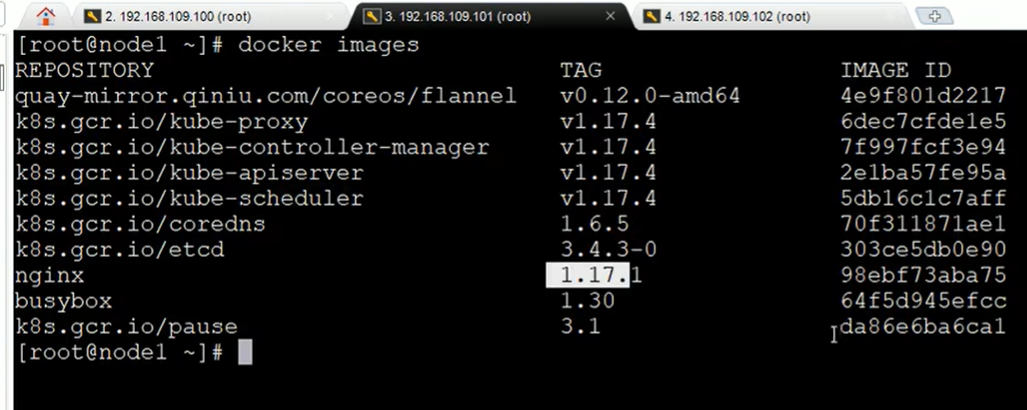
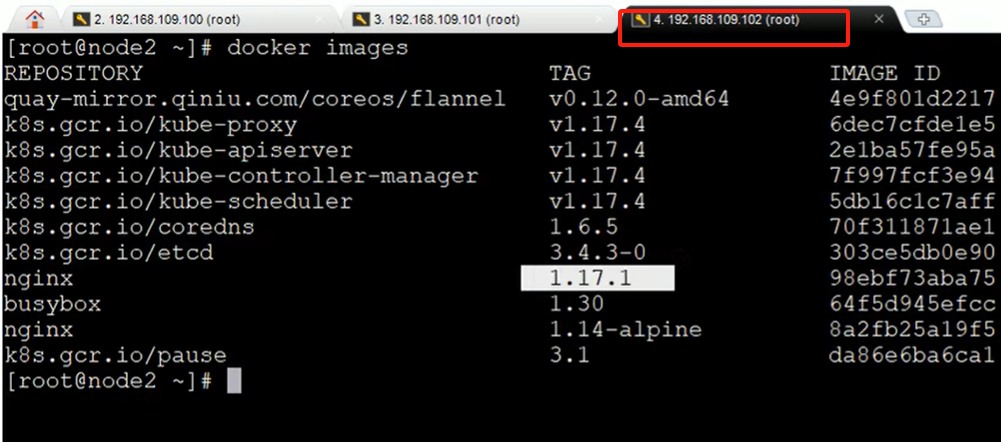
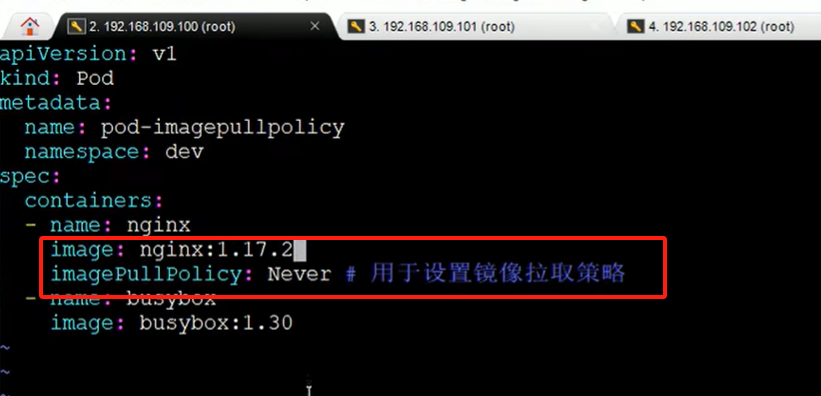
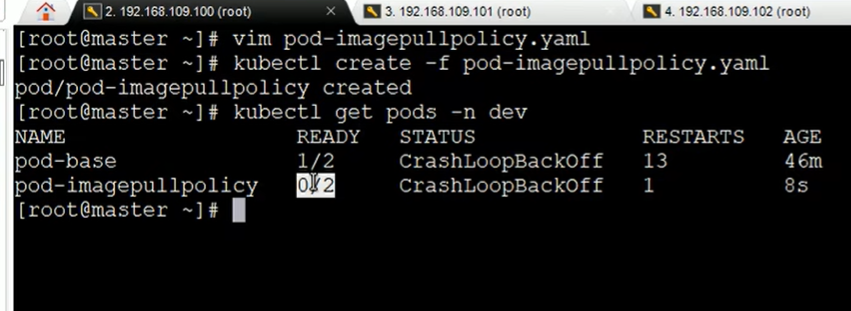

本地没有这个镜像,策略是Never,启动失败
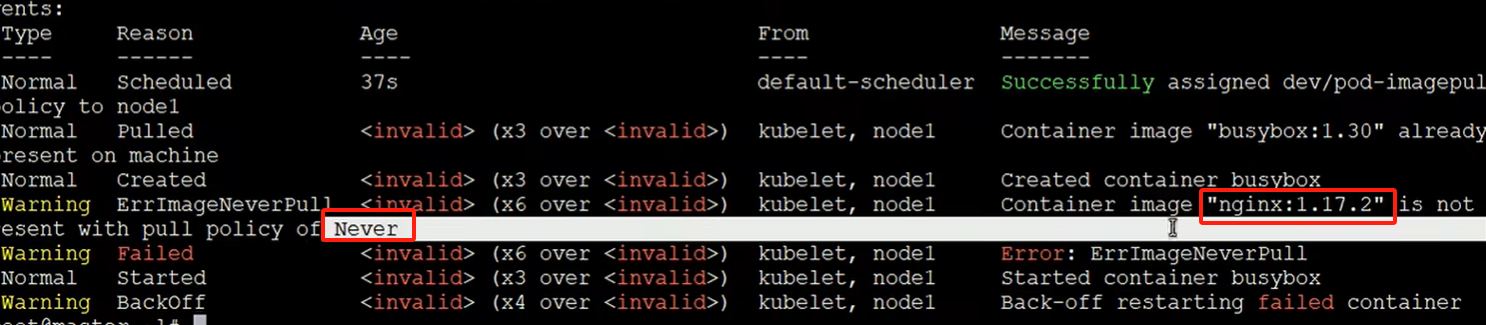
查看拉去策略:
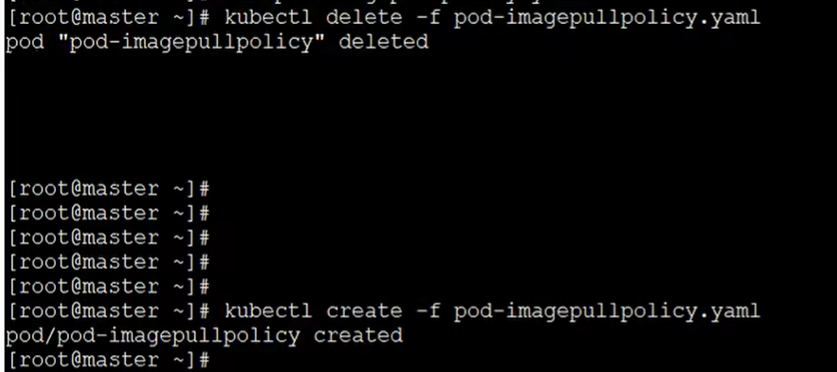
更改拉去策略:

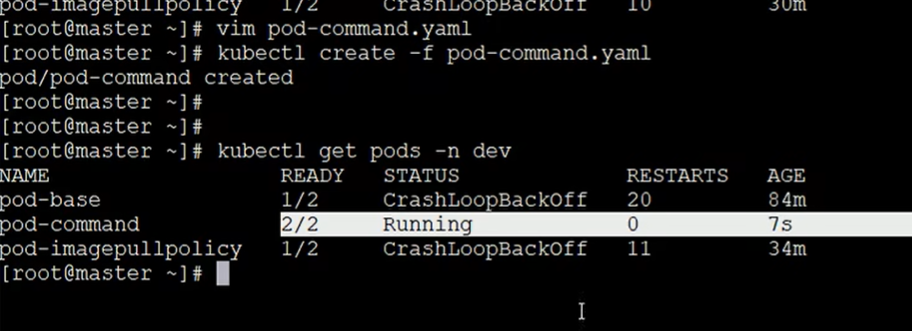
4.启动命令
运行的是nginx、busvbox没有正常运行,busvbox不是程序,是工具类的集合,在busvbox里面并没有一个进程一直在占据着,而是一些写的命令,没有进程占用这个容器,kubernetes会把他关闭
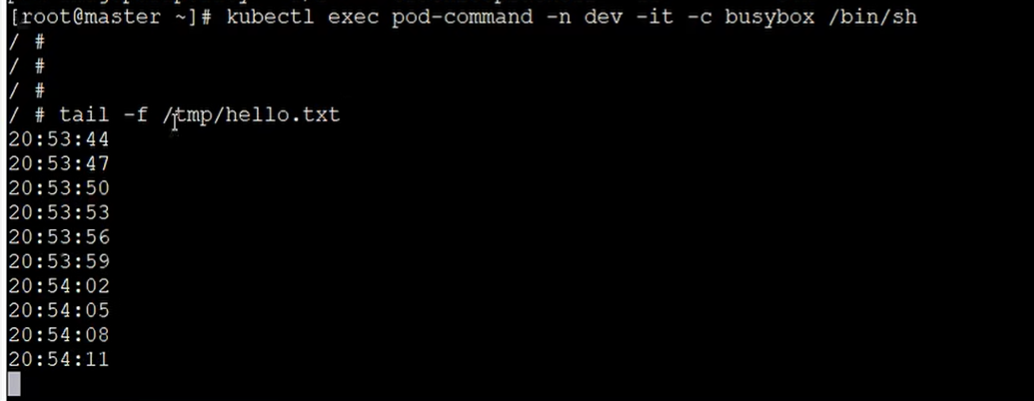
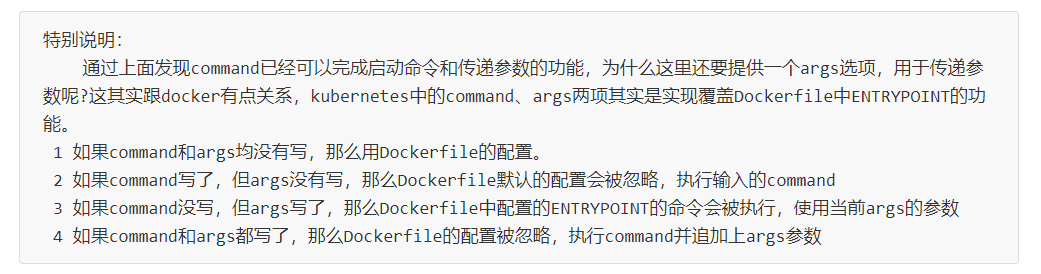
我们可以像办法让这个容器一直运行着,就可以通过command命令