关键点检测--使用YOLOv8对Leeds Sports Pose(LSP)关键点检测
目录
- 1. Leeds Sports Pose数据集下载
- 2. 数据集处理
- 2.1 获取标签
- 2.2 将图像文件和标签文件处理成YOLO能使用的格式
- 3. 用YOLOv8进行训练
- 3.1 训练
- 3.2 预测
1. Leeds Sports Pose数据集下载
从kaggle官网下载这个数据集,地址为link,下载好的数据集文件如下:
| |——archive
|——images 这个文件夹中放了2000张运动图像
|——visualized 这个文件夹放的是带关键点的图像
|——joints.mat 存放的是关键点标签
|——README.txt 存放对数据集的介绍
2. 数据集处理
2.1 获取标签
原图像的关键点标签以joints.mat格式存放,用python脚本对其进行解析,这里注意每张图像的大小不同,因此不同图像的宽高不同要注意。 解析代码如下,注意更换里面的图像路径。
import os
import cv2
import numpy as np
import scipy.io as sio# 加载 joints.mat 文件
mat_path = "joints.mat"
data = sio.loadmat(mat_path)# 查看所有键
print(data.keys())# 获取 joints 数据 (假设其结构为 (3, num_keypoints, num_samples))
joints = data['joints']# 路径配置
output_dir = r"LSP\labels"
image_dir = r"LSP\images" # 图像目录路径
os.makedirs(output_dir, exist_ok=True)# 解析 joints 数据
num_samples = joints.shape[2]for idx in range(num_samples):# 构建图像路径image_path = os.path.join(image_dir, f"im{idx + 1:04d}.jpg")# 检查图像是否存在if not os.path.exists(image_path):print(f"图像 {image_path} 不存在,跳过该样本。")continue# 获取当前样本的关键点数据keypoints = joints[:, :, idx]x_coords = keypoints[0, :]y_coords = keypoints[1, :]visibility = keypoints[2, :]# 读取图像获取实际尺寸img = cv2.imread(image_path)if img is None:print(f"无法读取图像 {image_path},跳过该样本。")continueimg_height, img_width = img.shape[:2]# 归一化关键点坐标x_coords /= img_widthy_coords /= img_height# 计算边界框x_min, x_max = np.min(x_coords), np.max(x_coords)y_min, y_max = np.min(y_coords), np.max(y_coords)bbox_width = x_max - x_minbbox_height = y_max - y_minx_center = x_min + bbox_width / 2y_center = y_min + bbox_height / 2# 构建标签行:class_id x_center y_center width height x1 y1 x2 y2 ...label = f"0 {x_center:.6f} {y_center:.6f} {bbox_width:.6f} {bbox_height:.6f} "label += " ".join([f"{x:.6f} {y:.6f}" for x, y in zip(x_coords, y_coords)])label += "\n"# 保存标签文件label_path = os.path.join(output_dir, f"im{idx + 1:04d}.txt")with open(label_path, "w") as f:f.write(label)print(f"所有关键点数据已转换为 YOLOv8 格式,保存至 {output_dir}")
获取的关键点标签如下图:
对应的图像如下图:

2.2 将图像文件和标签文件处理成YOLO能使用的格式
我是按照8比2将数据集分成训练集和测试集,划分代码如下:
import os
import random
import shutil# 数据集路径images_path = r"LSP\images"
labels_path = r"LSP\labels"# 输出路径
train_img_dir = os.path.join(images_path, "train")
val_img_dir = os.path.join(images_path, "val")
train_lbl_dir = os.path.join(labels_path, "train")
val_lbl_dir = os.path.join(labels_path, "val")# 创建输出文件夹
os.makedirs(train_img_dir, exist_ok=True)
os.makedirs(val_img_dir, exist_ok=True)
os.makedirs(train_lbl_dir, exist_ok=True)
os.makedirs(val_lbl_dir, exist_ok=True)# 获取所有图像文件名(不带扩展名)
image_files = sorted([f.split('.')[0] for f in os.listdir(images_path) if f.endswith('.jpg')])# 设置划分比例
train_ratio = 0.8
val_ratio = 0.2# 随机打乱文件列表
random.shuffle(image_files)# 划分数据集
train_count = int(len(image_files) * train_ratio)
train_files = image_files[:train_count]
val_files = image_files[train_count:]def move_files(file_list, img_dir, lbl_dir):for filename in file_list:img_src = os.path.join(images_path, f"{filename}.jpg")lbl_src = os.path.join(labels_path, f"{filename}.txt")img_dst = os.path.join(img_dir, f"{filename}.jpg")lbl_dst = os.path.join(lbl_dir, f"{filename}.txt")if os.path.exists(img_src) and os.path.exists(lbl_src):shutil.move(img_src, img_dst)shutil.move(lbl_src, lbl_dst)# 移动文件
move_files(train_files, train_img_dir, train_lbl_dir)
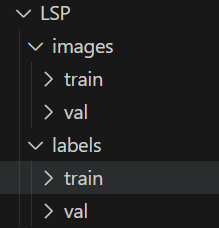
move_files(val_files, val_img_dir, val_lbl_dir)print(f"数据集划分完成:\n 训练集:{len(train_files)} 张\n 验证集:{len(val_files)} 张")划分后的文件格式图:
| | |——LSP 文件名
| |——images
|——train 训练数据
|——val 测试数据
| |——val
|——train 训练标签
|——val 测试标签
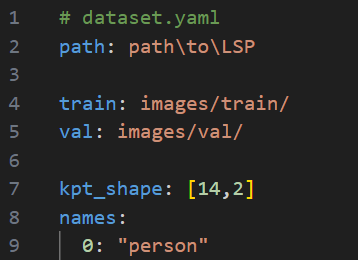
数据集的yaml格式如下:
3. 用YOLOv8进行训练
3.1 训练
下面是我进行训练的代码
# Ultralytics YOLO 🚀, AGPL-3.0 licensefrom copy import copyfrom ultralytics.models import yolo
from ultralytics.nn.tasks import PoseModel
from ultralytics.utils import DEFAULT_CFG, LOGGER
from ultralytics.utils.plotting import plot_images, plot_resultsclass PoseTrainer(yolo.detect.DetectionTrainer):"""A class extending the DetectionTrainer class for training based on a pose model.Example:```pythonfrom ultralytics.models.yolo.pose import PoseTrainerargs = dict(model='yolov8n-pose.pt', data='coco8-pose.yaml', epochs=3)trainer = PoseTrainer(overrides=args)trainer.train()```"""def __init__(self, cfg=DEFAULT_CFG, overrides=None, _callbacks=None):"""Initialize a PoseTrainer object with specified configurations and overrides."""if overrides is None:overrides = {}overrides["task"] = "pose"super().__init__(cfg, overrides, _callbacks)if isinstance(self.args.device, str) and self.args.device.lower() == "mps":LOGGER.warning("WARNING ⚠️ Apple MPS known Pose bug. Recommend 'device=cpu' for Pose models. ""See https://github.com/ultralytics/ultralytics/issues/4031.")def get_model(self, cfg=None, weights=None, verbose=True):"""Get pose estimation model with specified configuration and weights."""model = PoseModel(cfg, ch=3, nc=self.data["nc"], data_kpt_shape=self.data["kpt_shape"], verbose=verbose)if weights:model.load(weights)return modeldef set_model_attributes(self):"""Sets keypoints shape attribute of PoseModel."""super().set_model_attributes()self.model.kpt_shape = self.data["kpt_shape"]def get_validator(self):"""Returns an instance of the PoseValidator class for validation."""self.loss_names = "box_loss", "pose_loss", "kobj_loss", "cls_loss", "dfl_loss"return yolo.pose.PoseValidator(self.test_loader, save_dir=self.save_dir, args=copy(self.args), _callbacks=self.callbacks)def plot_training_samples(self, batch, ni):"""Plot a batch of training samples with annotated class labels, bounding boxes, and keypoints."""images = batch["img"]kpts = batch["keypoints"]cls = batch["cls"].squeeze(-1)bboxes = batch["bboxes"]paths = batch["im_file"]batch_idx = batch["batch_idx"]plot_images(images,batch_idx,cls,bboxes,kpts=kpts,paths=paths,fname=self.save_dir / f"train_batch{ni}.jpg",on_plot=self.on_plot,)def plot_metrics(self):"""Plots training/val metrics."""plot_results(file=self.csv, pose=True, on_plot=self.on_plot) # save results.pngif __name__ == "__main__":args = dict(model=r'E:\postgraduate\bolt_lossen_project\ultralytics-8.1.0\yolov8n-pose.pt', epochs= 100, mode='train')trains = PoseTrainer(overrides=args)trains.train()#predictor.predict_cli()
3.2 预测
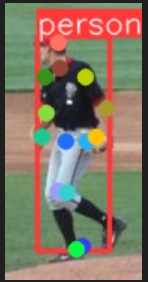
预测代码:
# Ultralytics YOLO 🚀, AGPL-3.0 licensefrom ultralytics.engine.results import Results
from ultralytics.models.yolo.detect.predict import DetectionPredictor
from ultralytics.utils import DEFAULT_CFG, LOGGER, ops
import cv2class PosePredictor(DetectionPredictor):"""A class extending the DetectionPredictor class for prediction based on a pose model.Example:```pythonfrom ultralytics.utils import ASSETSfrom ultralytics.models.yolo.pose import PosePredictorargs = dict(model='yolov8n-pose.pt', source=ASSETS)predictor = PosePredictor(overrides=args)predictor.predict_cli()```"""def __init__(self, cfg=DEFAULT_CFG, overrides=None, _callbacks=None):"""Initializes PosePredictor, sets task to 'pose' and logs a warning for using 'mps' as device."""super().__init__(cfg, overrides, _callbacks)self.args.task = "pose"if isinstance(self.args.device, str) and self.args.device.lower() == "mps":LOGGER.warning("WARNING ⚠️ Apple MPS known Pose bug. Recommend 'device=cpu' for Pose models. ""See https://github.com/ultralytics/ultralytics/issues/4031.")def postprocess(self, preds, img, orig_imgs):"""Return detection results for a given input image or list of images."""preds = ops.non_max_suppression(preds,self.args.conf,self.args.iou,agnostic=self.args.agnostic_nms,max_det=self.args.max_det,classes=self.args.classes,nc=len(self.model.names),)if not isinstance(orig_imgs, list): # input images are a torch.Tensor, not a listorig_imgs = ops.convert_torch2numpy_batch(orig_imgs)results = []for i, pred in enumerate(preds):orig_img = orig_imgs[i]pred[:, :4] = ops.scale_boxes(img.shape[2:], pred[:, :4], orig_img.shape).round()pred_kpts = pred[:, 6:].view(len(pred), *self.model.kpt_shape) if len(pred) else pred[:, 6:]pred_kpts = ops.scale_coords(img.shape[2:], pred_kpts, orig_img.shape)img_path = self.batch[0][i]results.append(Results(orig_img, path=img_path, names=self.model.names, boxes=pred[:, :6], keypoints=pred_kpts))return resultsif __name__ == "__main__":img = r'E:\postgraduate\bolt_lossen_project\ultralytics-8.1.0\archive\LSP\images\train\im0089.jpg'args = dict(model=r'E:\postgraduate\bolt_lossen_project\ultralytics-8.1.0\runs\pose\train\weights\best.pt', source=img, task = 'pose')predictor = PosePredictor(overrides=args)predictor.predict_cli()预测结果图: