通用外设驱动模型(四步法)
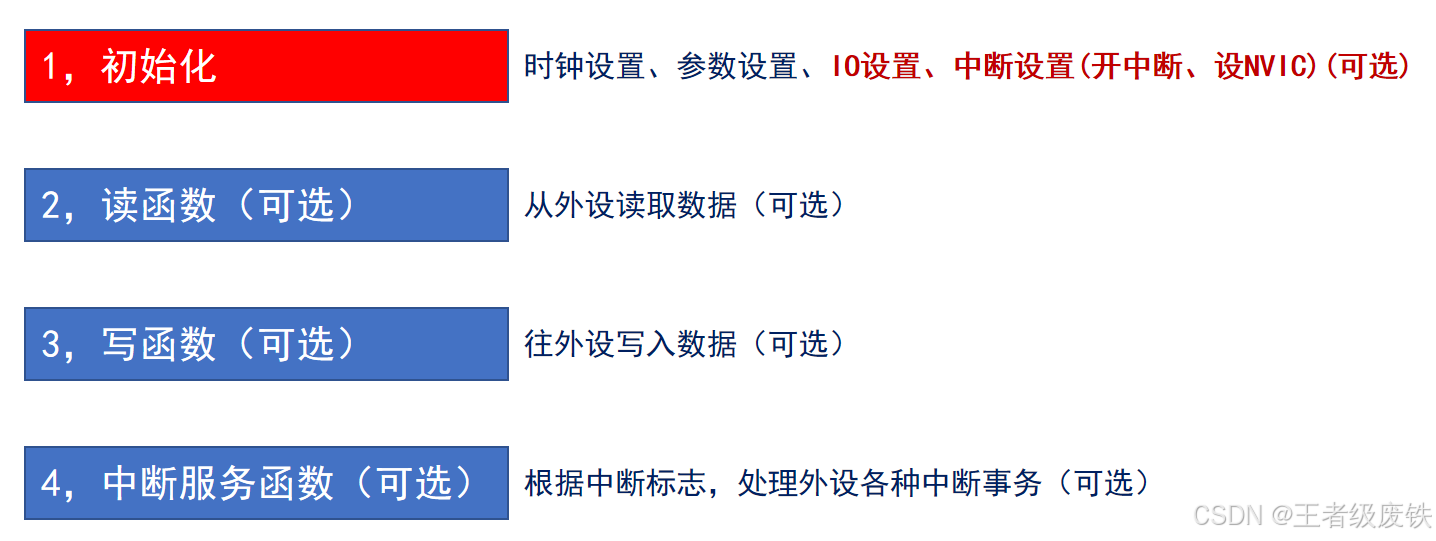
举例:GPIO配置步骤
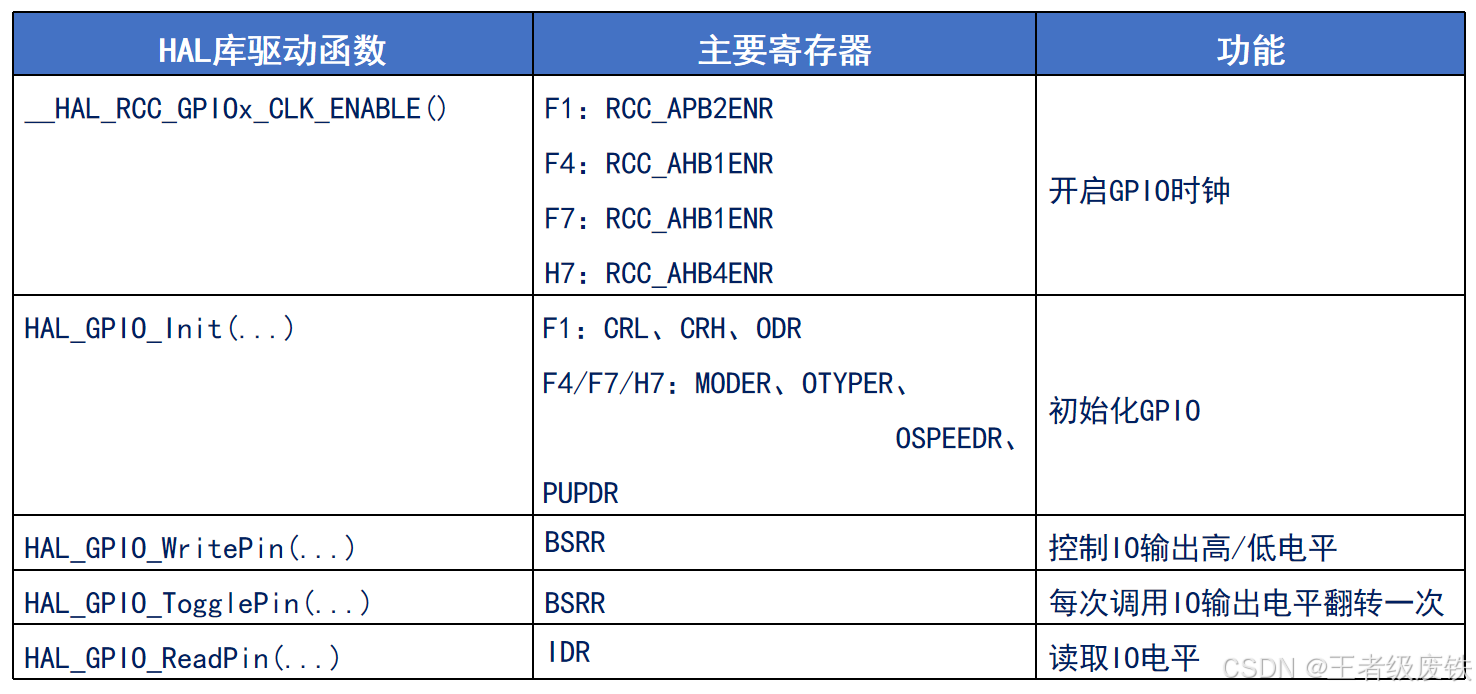
1、使能时钟
__HAL_RCC_GPIOx_CLK_ENABLE()
2、设置工作模式
HAL_GPIO_Init()
3、设置输出状态(可选)
HAL_GPIO_WritePin()
HAL_GPIO_TogglePin()
4、读取输入状态(可选)
HAL_GPIO_ReadPin()
模块化编程
led.h
#ifndef _LED_H
#define _LED_H
#include "./SYSTEM/sys/sys.h"/******************************************************************************************/
/* 引脚定义 */#define LED0_GPIO_PORT GPIOB
#define LED0_GPIO_PIN GPIO_PIN_5
#define LED0_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOB_CLK_ENABLE(); }while(0) /* PB使能时钟 */#define LED1_GPIO_PORT GPIOE
#define LED1_GPIO_PIN GPIO_PIN_5
#define LED1_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOE_CLK_ENABLE(); }while(0) /* PE使能时钟 *//******************************************************************************************/
/* LED端口定义 */
#define LED0(x) do{ x ? \HAL_GPIO_WritePin(LED0_GPIO_PORT, LED0_GPIO_PIN, GPIO_PIN_SET) : \HAL_GPIO_WritePin(LED0_GPIO_PORT, LED0_GPIO_PIN, GPIO_PIN_RESET); \}while(0) /* LED0翻转 */#define LED1(x) do{ x ? \HAL_GPIO_WritePin(LED1_GPIO_PORT, LED1_GPIO_PIN, GPIO_PIN_SET) : \HAL_GPIO_WritePin(LED1_GPIO_PORT, LED1_GPIO_PIN, GPIO_PIN_RESET); \}while(0) /* LED1翻转 *//* LED取反函数定义 */
#define LED0_TOGGLE() do{ HAL_GPIO_TogglePin(LED0_GPIO_PORT, LED0_GPIO_PIN); }while(0) /* 翻转LED0 */
#define LED1_TOGGLE() do{ HAL_GPIO_TogglePin(LED1_GPIO_PORT, LED1_GPIO_PIN); }while(0) /* 翻转LED1 *//******************************************************************************************/
/* 外部接口函数*/
void led_init(void); /* 初始化接口 */#endif
led.c
#include "./BSP/LED/led.h"/*** @brief 初始化LED相关IO口, 并使能时钟* @param 无* @retval 无*/
void led_init(void)
{GPIO_InitTypeDef gpio_init_struct;LED0_GPIO_CLK_ENABLE(); /* LED0时钟使能 */LED1_GPIO_CLK_ENABLE(); /* LED1时钟使能 */gpio_init_struct.Pin = LED0_GPIO_PIN; /* LED0引脚 */gpio_init_struct.Mode = GPIO_MODE_OUTPUT_PP; /* 推挽输出 */gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; /* 高速 */HAL_GPIO_Init(LED0_GPIO_PORT, &gpio_init_struct); /* 初始化LED0引脚 */gpio_init_struct.Pin = LED1_GPIO_PIN; /* LED1引脚 */HAL_GPIO_Init(LED1_GPIO_PORT, &gpio_init_struct); /* 初始化LED1引脚 */LED0(1); /* 关闭 LED0 */LED1(1); /* 关闭 LED1 */
}
mian.c
#include "./SYSTEM/sys/sys.h"
#include "./SYSTEM/delay/delay.h"
#include "./SYSTEM/usart/usart.h"
#include "./BSP/LED/led.h"int main(void)
{HAL_Init(); /* 初始化HAL库 */sys_stm32_clock_init(RCC_PLL_MUL9); /* 设置时钟,72M */delay_init(72); /* 初始化延时函数 */led_init(); /* 初始化LED */while(1){LED0(0); /* LED0 亮 */LED1(1); /* LED1 灭 */delay_ms(500);LED0(1); /* LED0 灭 */LED1(0); /* LED1 亮 */delay_ms(500);}
}