ZYNQ-UART串口中断
实验任务:使用uart控制器,完成串口中断数据环回的功能
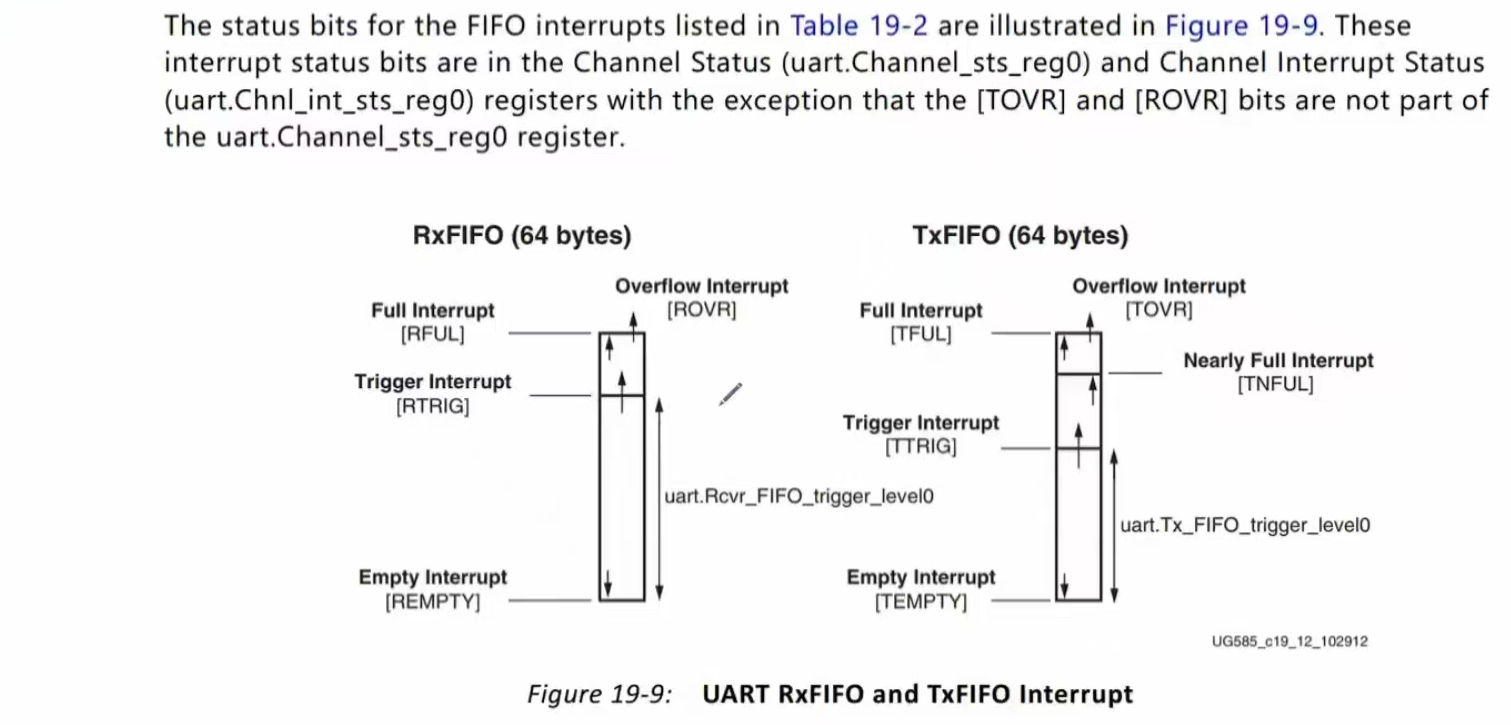
UART发送接收原理:
硬件block design:COPY之前的GPIO_MIO实验
VITIS代码:根据之前的GPIO_MIO实验来改
//UART头文件
#include <stdio.h>
#include "xparameters.h"
#include "xuartps.h"
#include "xscugic.h"
#include "xil_exception.h"//宏定义
#define UART_DEVICE_ID XPAR_XUARTPS_0_DEVICE_ID //使用的UART的器件ID
#define UART_INTERRUPT_ID XPAR_XUARTPS_0_INTR //针对UART0中断ID
#define INTC_DEVICE_ID XPAR_SCUGIC_SINGLE_DEVICE_ID //针对中断控制器(GIC)的器件ID//声明变量
XUartPs UartPs; //UART器件的驱动实例
XScuGic Intc; //GIC器件的驱动实例void uart_init(XUartPs *uart_ps);
void uart_intr_setup(XScuGic *Intc,XUartPs *uartPs);
void uart_intr_Handler(void *CallBackRef);int main(void)
{//UART初始化和配置uart_init(&UartPs);//UART的中断配置uart_intr_setup(&Intc,&UartPs);while(1);return 0;
}void uart_init(XUartPs *uart_ps)
{XUartPs_Config *uart_cfg;//第一步:根据uart ID去查找器件的配置信息uart_cfg = XUartPs_LookupConfig(UART_DEVICE_ID);//第二步:对GPIO的驱动进行初始化//XUartPs_CfgInitialize这个库函数里默认8bit数据位,1位停止位0校验;且波特率默认115200XUartPs_CfgInitialize(uart_ps,uart_cfg,uart_cfg->BaseAddress);//对uart进行配置//设置波特率XUartPs_SetBaudRate(uart_ps, 115200);//默认115200,可参数化修改//设置模式为正常模式XUartPs_SetOperMode(uart_ps,XUARTPS_OPER_MODE_NORMAL);//设置RxFIFO的触发阈值:1(即写入一位数据就可已开始读出)XUartPs_SetFifoThreshold(uart_ps,1);
}void uart_intr_setup(XScuGic *Intc,XUartPs *uart_Ps)
{XScuGic_Config *IntcConfig; //GIC配置信息的驱动实例//根据中断控制器(GIC)的器件ID来查找配置信息IntcConfig = XScuGic_LookupConfig(INTC_DEVICE_ID);//根据查找到的配置信息初始化中断控制器(GIC)XScuGic_CfgInitialize(Intc, IntcConfig,IntcConfig->CpuBaseAddress);//关联GPIO中断处理程序XScuGic_Connect(Intc, UART_INTERRUPT_ID,(Xil_ExceptionHandler)uart_intr_Handler,(void *)uart_Ps);//对UART的中断进行配置XUartPs_SetInterruptMask(uart_Ps,XUARTPS_IXR_RXOVR);//使能UART的中断XScuGic_Enable(Intc, UART_INTERRUPT_ID);//异常初始化(初始化ARM处理器异常句柄)Xil_ExceptionInit();//注册中断请求异常的处理程序Xil_ExceptionRegisterHandler(XIL_EXCEPTION_ID_INT,(Xil_ExceptionHandler)XScuGic_InterruptHandler,Intc);//使能处理器的中断Xil_ExceptionEnableMask(XIL_EXCEPTION_IRQ);
}//UART中断处理函数
void uart_intr_Handler(void *CallBackRef)
{u32 int_state;u8 rec_data;XUartPs *uart_ps = (XUartPs *)CallBackRef;//获取开启了哪些中断int_state = XUartPs_GetInterruptMask(uart_ps);//获取中断状态寄存器int_state &= XUartPs_ReadReg(uart_ps->Config.BaseAddress,XUARTPS_ISR_OFFSET);//判断中断触发类型是否为RxFIFO的触发阈值//(如果与出来的值就是高电平那就是RxFIFO的触发)if(int_state & XUARTPS_IXR_RXOVR){//读取RxFIFO中的数据rec_data = XUartPs_RecvByte(uart_ps->Config.BaseAddress);//清除中断XUartPs_WriteReg(uart_ps->Config.BaseAddress,XUARTPS_ISR_OFFSET,XUARTPS_IXR_RXOVR);//将接受的数据发送出去(发送数据:写TxFIFO寄存器)XUartPs_SendByte(uart_ps->Config.BaseAddress,rec_data);}
}
烧录上板验证:
在115200的波特率下,发送的数据能通过串口正常接收