通往“共识空域”的系统伦理演化
随着低空经济逐步从分布式运营向跨区域联动发展,AI无人系统不再只在本地决策,而开始涉及跨城市、跨机构的任务调度与行为协调。这一趋势带来了新的伦理挑战:多系统之间如何达成行动共识?算法背后的价值判断标准能否统一?人类监管如何介入却不过度干预?
本章提出“共识空域”概念,从系统伦理演化的角度出发,探讨AI系统在跨域协作中从“个体边界”走向“群体协同”的伦理基础,并引入“伦理联邦学习”与“规则嵌套式调停协议”等新机制,回应未来城市空域的治理挑战。
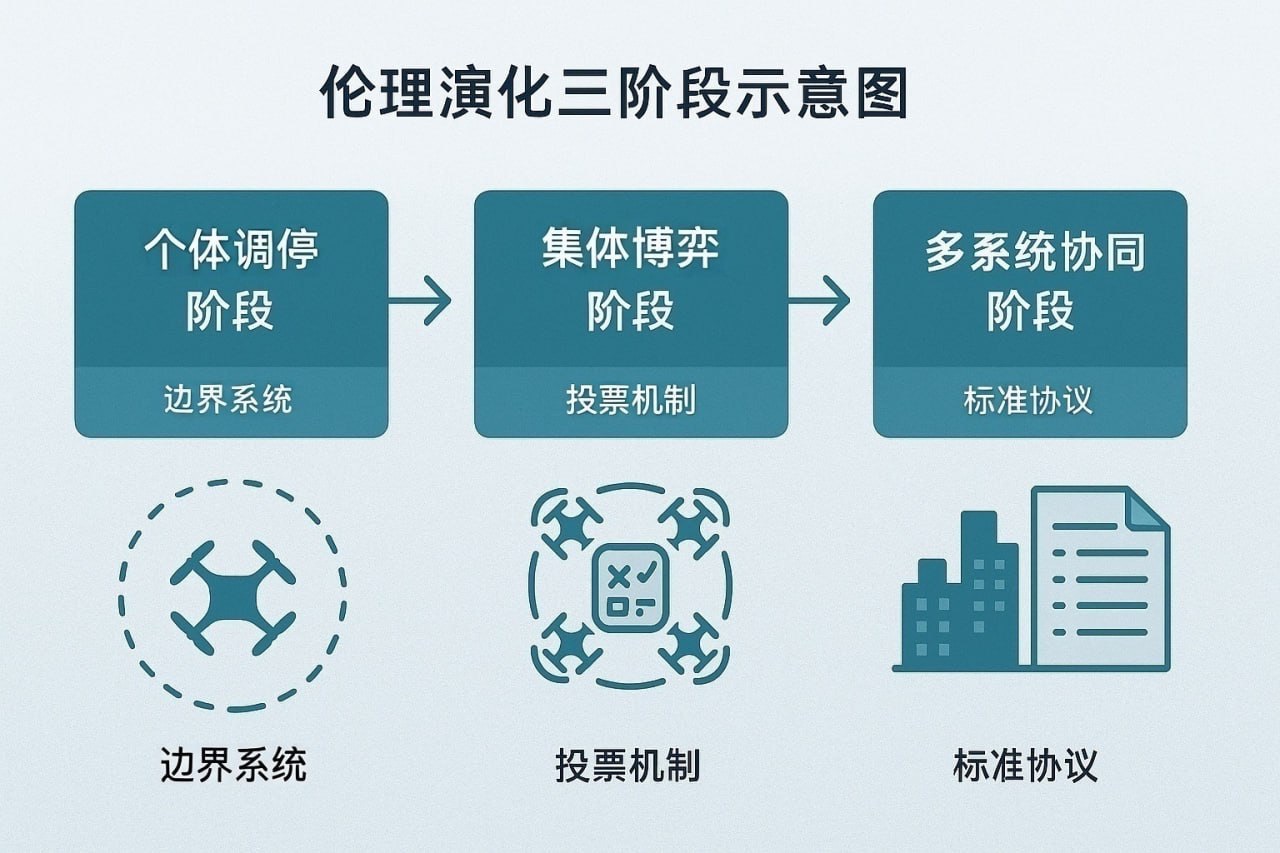
一、从调停到共识:伦理演化的三阶段
1.1 个体调停阶段:AI节点基于自身伦理策略做出行为回避或拒绝(对应第八章)
1.2 集群博弈阶段:集群内部建立道义投票与调停逻辑,但仍缺乏跨系统的规范共识
1.3 多系统协同阶段:城市A的AI调度与城市B的伦理模型存在差异,需引入“共识桥梁机制”
二、伦理联邦学习机制设计
2.1 原理概述:各区域AI系统保有本地伦理模型,通过“权重共享+案例比对”建立跨系统伦理知识融合框架
2.2 安全隔离:所有数据不出域,仅共享“伦理反应模型”,保护隐私同时实现协同
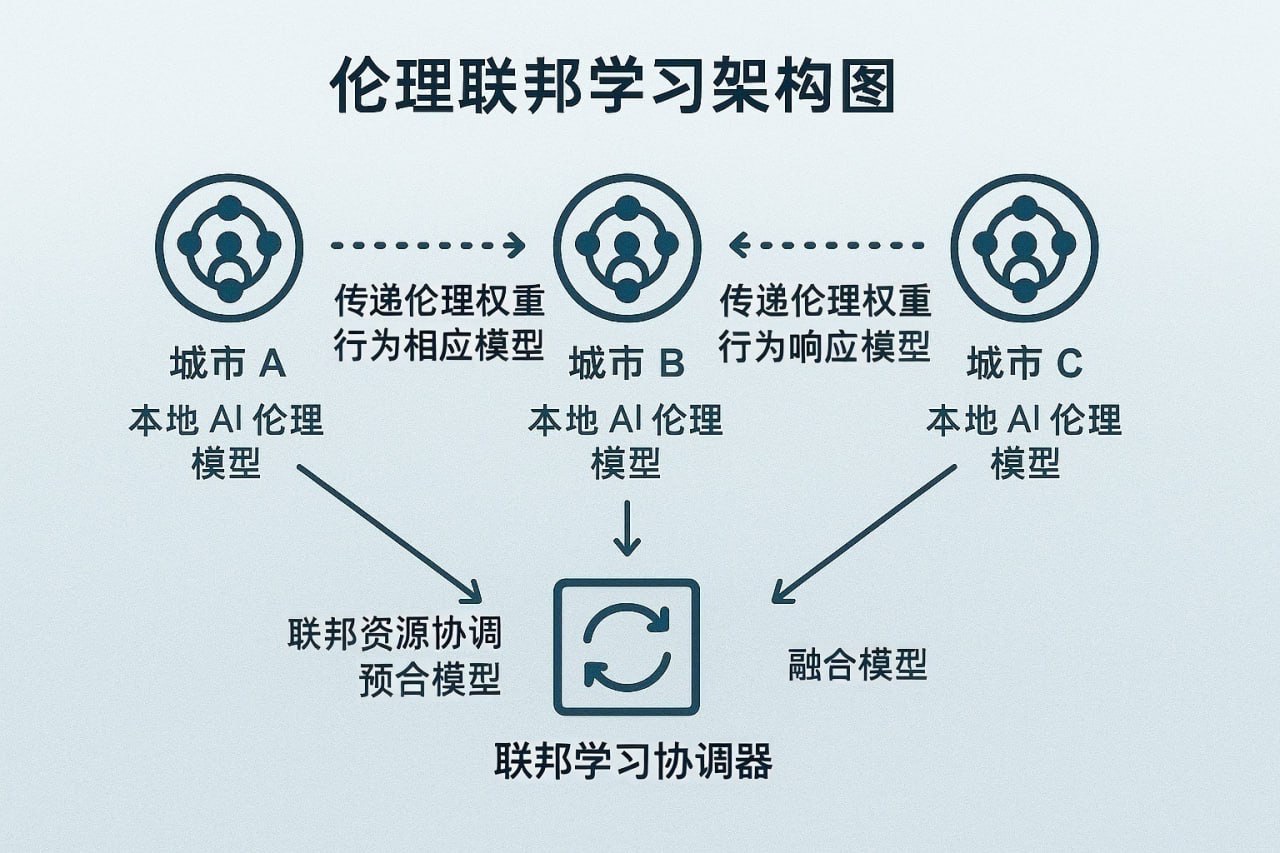
2.3 适应性训练:不同城市可设置权重调整参数(如对“生命优先”“数据敏感性”权重不同)
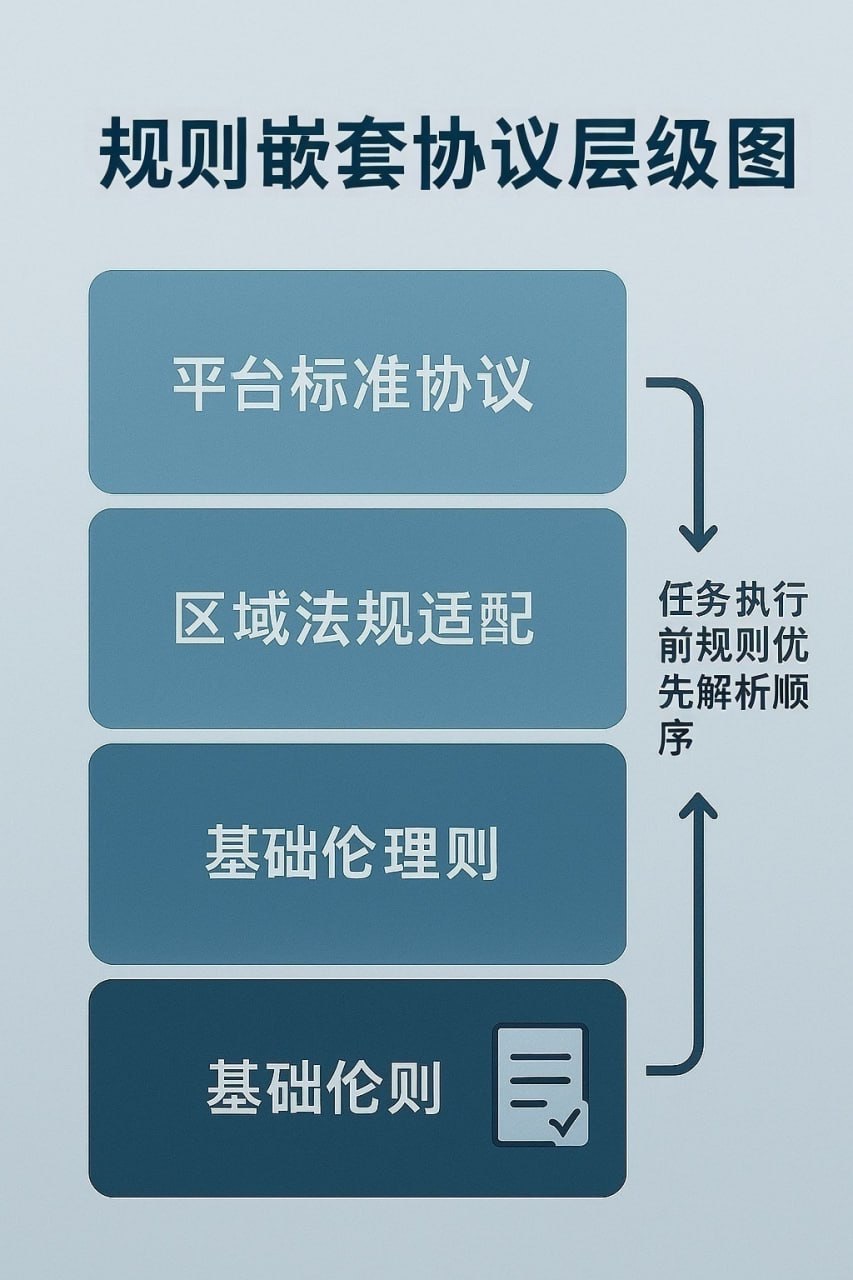
三、跨系统调停协议的标准化路径
3.1 规则嵌套协议结构:
- 基础层:最小伦理准则;
- 适配层:地方法规约束;
- 共识层:平台通用判断逻辑。
3.2 示范机制试点:睿途与多地监管平台协作,建立“多城协同模拟沙盒”,推动标准化伦理共识体系。

四、未来空域的伦理人格化趋势
系统不只是“接受规则”,而是能“对规则给出理由”;
引入“伦理身份识别码”,使每个AI行为可溯源、可辩护;
平台从任务调度者,逐步演化为城市行为共识的管理中枢。

结语
未来空域不只是“有人在飞”,而是“我们在共识中飞”。
睿途构建的,不只是调度系统,而是一种可以演化的伦理生态协议。这将是无人系统从“可控”走向“可信”的真正标志。