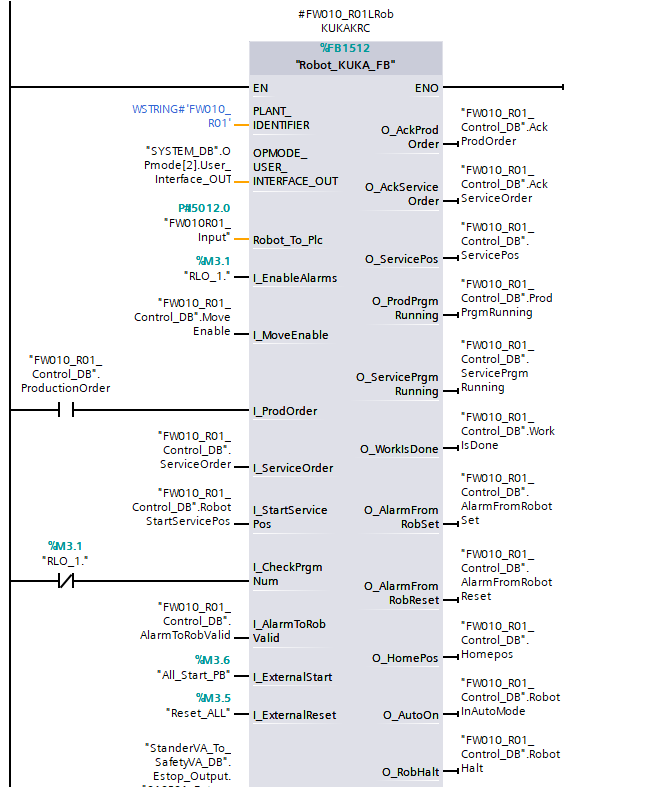
SICAR程序标准功能块 FB1512 “Robot_kuka_FB“
1、FB1512功能块截图
2、FB1512 功能块引脚功能定义
一、输入引脚
- EN:使能输入,决定功能块是否执行。
- IDENTIFIER(WSTRING#"FW010_R01"):设备标识,指定关联的机器人设备。
- OPMODE_USER_INTERFACE_OUT:操作模式输入,定义机器人工作模式(如手动、自动),数据源自系统数据库。
- Robot_To_PLC(PH5012.0 "FW010R01_Input"):机器人到 PLC 的数据输入,传递机器人状态、参数等信息。
- L_EnableAlarms(%M3.1 "RLO_1"):报警使能输入,激活机器人报警功能。
- L_MoveEnable("FW010_R01_Control_DB".MoveEnable):移动使能输入,允许机器人执行移动操作。
- L_ProdOrder("FW010_R01_Control_DB".ProductionOrder):生产订单输入,触发生产相关操作。
- L_ServiceOrder("FW010_R01_Control_DB".ServiceOrder):服务订单输入,触发维护或服务操作。
- L_StartServicePos("FW010_R01_Control_DB".RobotStartServicePos):启动服务位置输入,指示机器人移动到预设服务位置。
- L_CheckPrgmNum:检查程序号输入,验证机器人运行程序编号。
- L_AlarmToRobValid("FW010_R01_Control_DB".AlarmToRobValid):确认发送至机器人的报警信息有效。
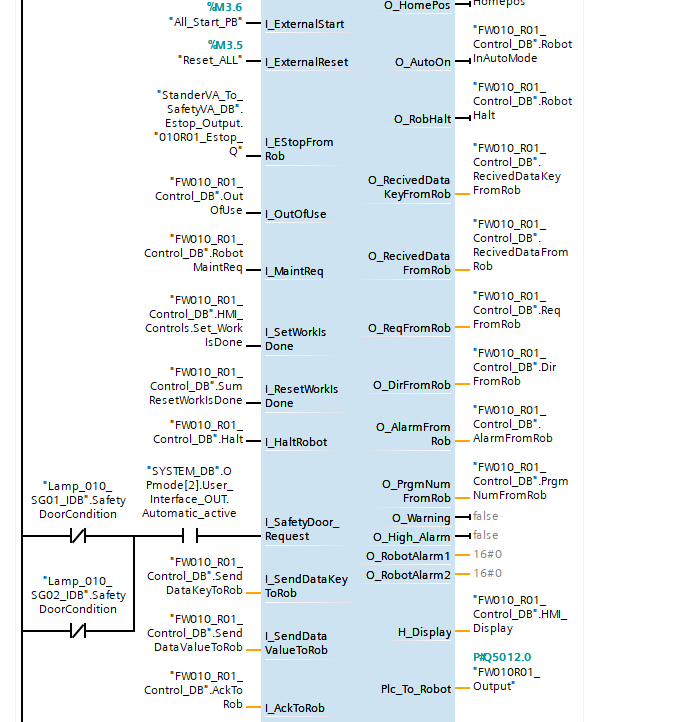
- L_ExternalStart(%M3.6 "All_Start_PB"):外部启动输入,通过外部按钮启动流程。
- L_ExternalReset(%M3.5 "Reset_ALL"):外部复位输入,通过外部按钮复位系统或报警。
- L_EStopFromRob("StanderVA_To_SafetyVA_DB".Estop_Output.Q):机器人急停输入,接收机器人急停信号。
- L_OutOfUse("FW010_R01_Control_DB".OutOfUse):标记机器人是否停用。
- L_MaintReq("FW010_R01_Control_DB".RobotMaintReq):维护请求输入,提示机器人需要维护。
- L_SetWorksDone("FW010_R01_Control_DB".HMI_Controls.Set_WorkIsDone):设置工作完成状态。
- L_ResetWorksDone("FW010_R01_Control_DB".SumResetWorksDone):重置工作完成状态。
- L_HaltRobot("FW010_R01_Control_DB".Halt):暂停机器人输入,使机器人停止运行。
- L_SafetyDoor_Request:安全门请求输入,结合安全门信号(如 "Lamp_01Q_SG01_IDB".SafetyDoorCondition),监测安全门状态。
- L_SendDataKeyToRob("FW010_R01_Control_DB".SendDataKeyToRob):发送数据键到机器人,用于数据交互。
- L_SendDataValueToRob("FW010_R01_Control_DB".SendDataValueToRob):发送数据值到机器人。
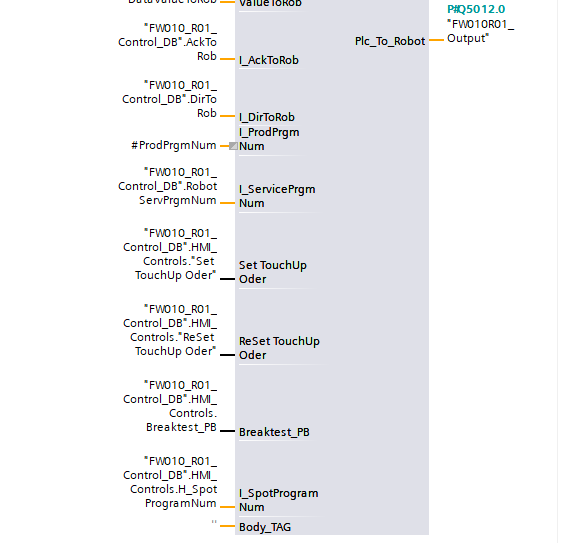
- L_AckToRob("FW010_R01_Control_DB".AckToRob):向机器人发送确认信号。
- L_DirToRob("FW010_R01_Control_DB".DirToRob):向机器人发送方向控制信号。
- L_ProdPrgmNum(#ProdPrgmNum):生产程序号输入,指定运行的生产程序编号。
- L_ServicePrgmNum("FW010_R01_Control_DB".RobotServPrgNum):服务程序号输入,指定服务程序编号。
- Set TouchUp Oder("FW010_R01_Control_DB".HMI_Controls.SetTouchUpOder):设置触摸调整命令,用于调整机器人位置或参数。
- ReSet TouchUp Oder("FW010_R01_Control_DB".HMI_Controls.ReSetTouchUpOder):重置触摸调整命令。
- Breaktest_PB("FW010_R01_Control_DB".HMI_Controls.Breaktest_PB):中断测试按钮输入,触发相关测试流程。
- L_SpotProgramNum("FW010_R01_Control_DB".HMI_Controls.H_SpotProgramNum):点动程序号输入,用于点动操作的程序选择。
二、输出引脚
- ENO:使能输出,功能块正常运行时导通。
- O_AckProdOrder("FW010_R01_Control_DB".AckProdOrder):生产订单确认输出,反馈 PLC 生产订单已确认。
- O_AckServiceOrder("FW010_R01_Control_DB".AckServiceOrder):服务订单确认输出,反馈服务订单已确认。
- O_ServicePos("FW010_R01_Control_DB".ServicePos):服务位置输出,指示机器人是否到达服务位置。
- O_ProdPrgmRunning("FW010_R01_Control_DB".ProdPrgmRunning):生产程序运行输出,表明生产程序正在执行。
- O_ServicePrgmRunning("FW010_R01_Control_DB".ServicePrgmRunning):服务程序运行输出,表明服务程序正在执行。
- O_WorkIsDone("FW010_R01_Control_DB".WorkIsDone):工作完成输出,标识任务执行完毕。
- O_AlarmFromRobSet("FW010_R01_Control_DB".AlarmFromRobSet):机器人报警设置输出,触发机器人报警。
- O_AlarmFromRobReset("FW010_R01_Control_DB".AlarmFromRobReset):机器人报警复位输出,清除报警。
- O_HomePos("FW010_R01_Control_DB".HomePos):回零位置输出,指示机器人是否处于原点。
- O_AutoOn("FW010_R01_Control_DB".RobotInAutoMode):自动模式输出,控制机器人进入自动运行模式。
- O_RobHalt("FW010_R01_Control_DB".RobotHalt):机器人暂停输出,使机器人停止运行。
- O_RecivedDataKeyFromRob("FW010_R01_Control_DB".RecivedDataKeyFromRob):接收机器人数据键输出,传递机器人数据键信息。
- O_RecivedDataFromRob("FW010_R01_Control_DB".RecivedDataFromRob):接收机器人数据输出,传输机器人数据。
- O_ReqFromRob("FW010_R01_Control_DB".ReqFromRob):来自机器人的请求输出。
- O_DirFromRob("FW010_R01_Control_DB".DirFromRob):来自机器人的方向输出。
- O_AlarmFromRob("FW010_R01_Control_DB".AlarmFromRob):机器人报警输出,反馈机器人报警状态。
- O_PrgmNumFromRob("FW010_R01_Control_DB".PrgmNumFromRob):来自机器人的程序号输出。
- O_Warning:固定为 false,无警告输出。
- O_High_Alarm:固定为 false,无高报警输出。
- O_RobotAlarm1(16≠0 时触发):机器人报警 1 输出。
- O_RobotAlarm2(16≠0 时触发):机器人报警 2 输出。
- H_Display("FW010_R01_Control_DB".HMI_Display):人机界面显示输出,用于界面交互。
- Plc_To_Robot(PHQ5012.0 "FW010R01_Output"):PLC 到机器人的数据输出,传递控制指令或数据。
3、功能块输入参数设置
输入引脚参数设置的详细说明:
1. 设备标识(IDENTIFIER)
- 类型:WSTRING
- 设置:固定值为
“FW010_R01”,用于唯一指定关联的 KUKA 机器人设备,确保功能块作用于正确的机器人。
2. 操作模式(OPMODE_USER_INTERFACE_OUT)
- 来源:通常关联系统数据库(如
“SYSTEM_DB.O_Pmode[2]_User_Interface_OUT”)。 - 设置:通过系统配置或人机界面定义机器人工作模式(如手动、自动、调试模式),功能块读取该参数以调整内部逻辑。
3. 报警使能(L_EnableAlarms)
- 地址:
%M3.1(示例地址)。 - 设置:在 PLC 中置位
%M3.1为1,激活机器人报警功能,允许系统检测和反馈异常。
4. 移动使能(L_MoveEnable)
- 来源:关联控制数据库(如
“FW010_R01_Control_DB”.MoveEnable)。 - 设置:在控制数据库中置位
MoveEnable为1,允许机器人执行移动操作。
5. 生产订单(L_ProdOrder)
- 来源:
“FW010_R01_Control_DB”.ProductionOrder。 - 设置:通过 PLC 逻辑控制该信号置位(
1),触发机器人执行生产相关操作,如启动生产程序。
6. 服务订单(L_ServiceOrder)
- 来源:
“FW010_R01_Control_DB”.ServiceOrder。 - 设置:置位该信号(
1),触发机器人维护或服务操作(如检修、参数校准)。
7. 外部启动(L_ExternalStart)
- 地址:
%M3.6(关联按钮“All_Start_PB”)。 - 设置:按下外部按钮,置位
%M3.6为1,启动功能块关联的流程(如生产或服务任务)。
8. 外部复位(L_ExternalReset)
- 地址:
%M3.5(关联按钮“Reset_ALL”)。 - 设置:按下外部按钮,置位
%M3.5为1,复位系统报警或异常状态。
9. 机器人到 PLC 数据(Robot_To_PLC)
- 地址:
PH5012.0 “FW010R01_Input”。 - 设置:确保 PLC 与机器人通信配置正确,该地址映射机器人输出数据区,用于接收机器人状态、参数等信息。
10. PLC 到机器人数据(Plc_To_Robot)
- 地址:
PHQ5012.0 “FW010R01_Output”。 - 设置:配置 PLC 输出数据区,向机器人发送控制指令、参数值(如
L_SendDataValueToRob关联的数据),确保通信地址与机器人端匹配。
11. 程序号输入(L_ProdPrgmNum、L_ServicePrgmNum)
- 设置:
L_ProdPrgmNum(生产程序号):设置具体数值(如#ProdPrgmNum),指定机器人运行的生产程序。L_ServicePrgmNum(服务程序号):关联“FW010_R01_Control_DB”.RobotServPrgNum,设置服务程序编号。
12. 安全门请求(L_SafetyDoor_Request)
- 来源:关联安全门信号(如
“Lamp_01Q_SG01_IDB”.SafetyDoorCondition)。 - 设置:确保安全门状态信号正确接入 PLC,功能块通过该信号监测安全门是否关闭且正常,保障操作安全。
13. 触摸调整与测试按钮(Set TouchUp Oder、ReSet TouchUp Oder、Breaktest_PB)
- 来源:关联控制数据库(如
“FW010_R01_Control_DB”.HMI_Controls.SetTouchUpOder等)。 - 设置:
Set TouchUp Oder:置位时触发机器人触摸调整操作(如位置校准)。ReSet TouchUp Oder:置位时重置触摸调整状态。-
Breaktest_PB(中断测试按钮):置位时触发中断测试流程,用于调试或检测。
4、功能块 FB1512 的作用
FB1512 是用于 KUKA 机器人与 PLC 间通信与控制的核心功能块,主要作用包括:
- 任务协调:接收生产订单(L_ProdOrder)和服务订单(L_ServiceOrder),协调机器人执行对应任务,通过输出引脚反馈订单确认(O_AckProdOrder、O_AckServiceOrder)。
- 运行控制:通过外部信号(L_ExternalStart、L_ExternalReset)控制流程启动与复位,利用 O_AutoOn 控制机器人自动模式,监测程序运行状态(O_ProdPrgmRunning、O_ServicePrgmRunning),并能暂停机器人(O_RobHalt)。
- 报警管理:通过 L_EnableAlarms 使能报警,利用 O_AlarmFromRobSet 触发报警,O_AlarmFromRobReset 复位报警,确保异常情况及时处理。
- 状态反馈:实时反馈机器人工作完成(O_WorkIsDone)、回零状态(O_HomePos)、报警状态(O_AlarmFromRob)等,便于 PLC 监控。
- 数据交互:通过 Robot_To_PLC 和 Plc_To_Robot 实现机器人与 PLC 间的数据双向传输,支持生产、服务程序号(L_ProdPrgmNum、L_ServicePrgmNum)等关键数据交互。
- 安全与维护:监测安全门状态(L_SafetyDoor_Request),接收维护请求(L_MaintReq),保障系统安全运行与维护需求响应。
- 精准操作:支持触摸调整(Set TouchUp Oder、ReSet TouchUp Oder)、点动程序(L_SpotProgramNum)等精细操作控制,满足多样化生产与维护场景。